
#00 コラム(4) テットのデザイン

テットのデザインが決まったので久しぶりに更新。シナリオは全く進んでおりませんが。だがしかし、テットはこれからキーとなるキャラなのだ。だから少々デザインに時間をかけた。
テットは、魔法力で動くロボットなのだが、何でもかんでもできるわけじゃない。ロボットという存在自体が、既に中世設定から逸脱しているのだが、そこはファンタジーと言うことでご容赦願いたい。テットの機能は大きく分けて2つある。
一つは、心理的ストレスの緩和を目的としたおしゃべり機能。心理的な緩衝材。長期間にわたっていつものメンツと単調なゴールドバード捕獲作業を行うため、ちょっとした心のすれ違いが大きな亀裂となってチームワークを崩壊させる。その辺の事情は現代社会と大差ない。そこで、王立研究所で長年にわたって開発されたAI機能の出番。そしてテット・ランドシリーズが生み出されたわけだ。だからテットは基本おしゃべりなのだ。皮肉や意地悪も言うし、優しい言葉のバリエーションも豊富だ。もっとも、ただおしゃべりしているわけでもないのだが、その辺の事情はまた今度。

「イエイエ、私ハ単純ニオシャベリガ好キナダケデスヨ」
嘘くさい。
「ソンナコトナイデスヨ~」……「そんなことないですわよ(はぁと)」
うっ、声色を色っぽくするあたりがますます怪しい。が、いつも適当にはぐらかされる。まるで某メーカーのスマホ端末のように。
もう一つの機能は、魔法力によるゴールドバードの広域探索の支援機能。機能的にはこっちが本命。詳細は次回以降のお話で紹介するとして、簡単に言うと魔法力による数キロメートル単位でのゴールドバードの探索を支援し、かつ発見時にはその方角と距離とを観測者たるエレノアの感覚にフィードバックする機能。基本的には三角測量に基づくが、距離に関してはイメージでフィードバックするという超高性能っぷり。
どういうことかと言うと、例えば2.5km先にゴールドバードがいる、なんて言われてもさっぱりイメージが湧かないが、周辺環境の風景とともに2.5km先までの風景イメージをエレノアにフィードバックすることができるのだ。これにより、エレノアはペーターとともに上空を飛行しながらその記憶を頼りにゴールドバードがいた方角を追いやすくなるというわけだ。何という賢さ。そんなカーナビがほしい。作者は方向音痴なのだ。スマホを持っても迷うほどに。

さて、こちらが初期のテットのデザイン。厳密にはバージョン2で、本当の最初よりもちょっぴり変更しているが、作者以外気付くまい。そして例の如くエレノアが乱入。無駄にセクシーポーズで誘惑してくる。だめだって。あと2,3年後だな、うむ。伸びしろに期待。
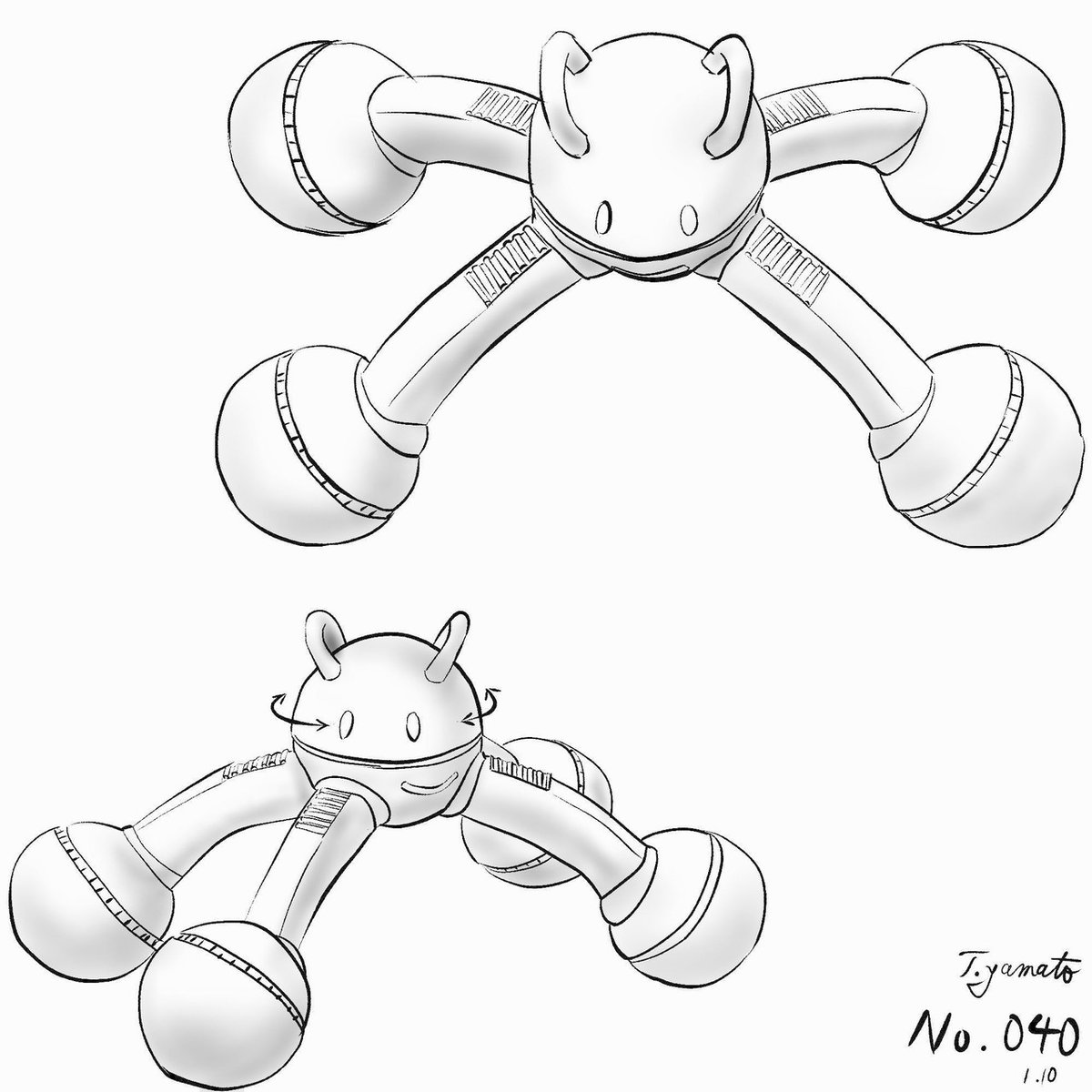
こちらが決定稿のテットのデザイン。……あんまり変わってないね。だがマイナーチェンジが多数。アームが緩やかに湾曲。というのも、エレノアと言えども人一人乗せるので、直線的なアームでは関節にかかる負荷が大きい。そこで少しでもそれを緩和するために人体の骨格に習って湾曲させてみた。また、円柱だとつまらないので角丸な四角柱を湾曲させてみた。これは実は、上面に滑り止めの平面を作る段階での仕様変更。
滑り止めというのは、エレノアからの指摘で採用。
「テットに登るとき、足が滑って危ないのよね。特にゴールドバードとのロングチェイスの後だと腹ぺこ過ぎてフラフラなのに、そこで足まで滑るものだから苛つくわ。なんとかならないの?」
ということで、有能な王立研究所の研究員がテットのアームの形状を変更して上面を平坦にし、そこに凹凸を付けて滑り止め加工を施したそうな。やったね、テット。脚が新しくなったよ。
「カーボン素材ナラモット早ク走レマス」
お前はF1カーにでもなるつもりか。
本当は他にも、乗り降り時用の降着ポーズや、ゴールドバード探索中のギミックなどの下絵も用意していたのだが、それはまた今度。シナリオ中で展開させることにしよう。
今日の更新はここまで。次回に続く。
読んでくれてありがとう。気長にマイペースに書いてます。この出会いに感謝😊