深海での「顕微鏡観察」~水中ホログラフィック顕微鏡~

2014年3月時点の内容です
はじめに
近年、プランクトンをはじめとする水中に棲む微小生物の観察手法は「イメージング」技術を利用して飛躍的に進歩しました。ここでは、最新のイメージング技術を使用した「水中顕微鏡」についてご紹介します。
微生物の観察
微生物の観察には様々な顕微鏡が使用されます。特に水中に棲む微生物の場合、調査地または海域で試料となる水を採取、或いはプランクトンネットのような網目の非常に細かいネットを用いてプランクトンを採取してホルマリン等で固定し、研究室に持ち帰って光学顕微鏡や電子顕微鏡で観察する方法しかありませんでした。しかしこれらは生物の標本を観察しているにすぎず、現場(in situ)の環境とは全くちがうため、生物本来の姿を観察することはできません。
このように、ひと昔前には生物をそれらが生息している環境で生きたまま観察する事は不可能に近い状況でした。特に外洋域では、沿岸域にくらべて生物の存在量自体が少ないため、その分布や存在量などを調べるために多くの時間とお金、労力を割いて観測が行われてきました。現在でもプランクトンネットは現役で使用されていますが、近年は水中の微生物を観察するあらたな手法として、イメージング技術を利用した装置が開発され、利用されています。
たとえばVisual (Video)Plankton Recorderイメージングフローサイトメータは、植物プランクトンや動物プランクトンを、それらが生息している場所で本来の姿のまま画像として記録できる装置として使用されています。これらは試料を採取しなくても現地で対象物を映像化し、得られたデータからプランクトンの種類や量を推定するための情報が得られる非常に優れた技術ですが、焦点深度が浅く、計測できるサイズに限界があるため、2次元的な計測に留まり、定量する事はできませんでした。その後、レーザー光を使用して懸濁粒子をサイズ別にカウントできる装置が開発されましたが、量は推定できても懸濁物が何から構成されているかまでは得る事ができませんでした。
これらの長所を併せ持つ画期的な最新技術が、「水中ホログラフィック顕微鏡」です。数μm~数mmの微生物や粒子を現場(水中)でリアルタイムに観察できるほか、画角内を通過する粒子のサイズと量を定量することが可能です。今後、様々な分野及びアプリケーションでの応用が期待されます。

ホログラフィック顕微鏡の原理
Resolution Optics社製デジタルホログラフィック顕微鏡は、波長405nmの青色レーザーをピンホールで回折させて点光源として利用し、対向して配置されたデジタルCCDカメラで受光する、というシンプルな装置です。光源と受光部の間に物体があるとそこで散乱した光の影響による干渉縞がCCDによりデジタルイメージとして記録されます。この干渉縞をソフトウェアで解析し、物体を“Reconstruct(復元)”して画像を出力する技術がデジタルホログラフィック顕微鏡です。
CCDで記録されたイメージは光源~CCD 間の全ての情報が含まれており、光学カメラや顕微鏡のように焦点深度による制限がない(図2)ことから、光源からの任意距離毎の2次元断面(スライス)を復元して重ねる事により、物体を3次元的に復元することができます(但し、光が届かない光源から見て裏側の部分は復元できません)。
これまでの光学顕微鏡やVPR、FlowCAMなどはこの奥行が確保できないため、2 次元的な情報しか得られませんでした。また、1 秒間に最大15フレームのイメージを取得する事ができるため、ホログラフィック顕微鏡を水中で比較的高速に移動させながら連続的にデータを取得することができます。さらに、顕微鏡を固定して点光源とCCDの間を遊泳するプランクトンなどを連続撮影し、その軌跡を再現する事も可能です。
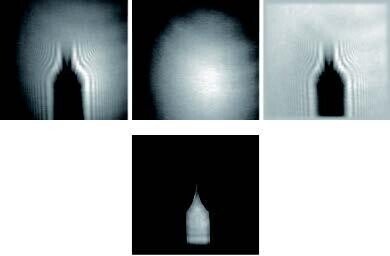
図1:ホログラムイメージと復元イメージ
上左:ホログラムイメージ
上中:バックグラウンドイメージ
上右:バックグラウンド補正後のホログラムイメージ
下 :ホログラムからReconstructしたイメージ(直径数mmの金属棒の先端を削って1μm以下に尖頭させたもの)


図2:光学及びホログラフィック顕微鏡の焦点深度の違い
Resolution Optics社が開発したピンホール式点光源を用いたホログラフィック顕微鏡は、歪のないイメージを再現できる非常に優れた技術で、カナダ、アメリカで特許を取得しています。
水中ホログラフィック顕微鏡


図3:水中ホログラフィック顕微鏡の構造と外観
水中ホログラフィック顕微鏡はレーザー光源とピンホール、受光部のデジタルCCDカメラから構成されています。光源とカメラは別々の耐圧容器に収納され、その間を通過する生物や粒子を観察します。最新機種は長さ30cm程度で、有線で陸上又は船上のPCに接続し、リアルタイムに観察ができるほか、用途に応じてバッテリと記録装置を接続してオフラインで使用することも可能です。得られたイメージはデータ収録・イメージ復元ソフトウェアで復元されます。

図4:収録・画像復元ソフトウェア画面
復元ソフトウェア画面(右:取得されたホログラムイメージ、左:復元されたイメージ断面)一例としてショウジョウバエの頭部についてホログラムイメージと復元画像を示します(図5)。
幅は約1mmですが、μmスケールの構造が良く再現されていることが判ります。
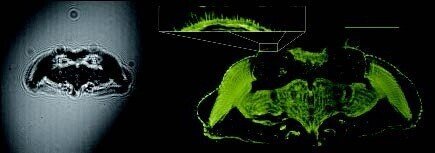
図5:ショウジョウバエ(頭部)のホログラムイメージ(左)
と復元イメージ(右)
次に、海水中を遊泳する藻類を観察した例を示します(図6)。左がホログラムデータですが、ここにはAに示すように約10μm前後の大きさを持つ藻類が3 個体(T1~3)捉えられています。BはAから0.1秒毎のホログラムデータを20個重ねたスタックデータです。この時点では丸い回折画像が連なって見えているだけで、詳しい情報は判りません。これを奥行の違う断面で復元してみるとC、Dのような画像になり、T1~3の個体が時間とともに移動している様子が判ります。CとDはどちらもBから復元した断面ですが、奥行方向の距離が異なります。3個体は同一断面上ではなく、3次元的に移動しているため、複数の距離断面で表現しています。


図6:藻類の移動に関する4次元的解析例
このように3次元的なホログラム画像を複数重ねる事によって「4次元」的な解析を行う事が可能です。同様の4次元解析例で、図7は渦鞭毛藻の一種(Alexandrium 属)が水温により違った挙動をする生態を捉えたものです。水温16℃では直線に近い連鎖群体が、21℃では環状を示しています。

図7:藻類の水温による挙動の違いを捉えた4次元解析例
また、画像の復元の他、取得したホログラムイメージから、粒径ごとの存在量をリアルタイムにカウントする事も可能です。取得したホログラムイメージは後処理でそこに含まれる微生物を復元可能であり、存在量とそこに含まれる種類の情報を一度に取得することができます。

図8:粒径毎にカウンティングするソフトウェア画面
水中ホログラフィック顕微鏡の実用例
水中ホログラフィック顕微鏡に関する実用例を紹介します。
①深海での実用例
大西洋の水深6,000mで観測された結果の一部をご紹介します。観測船からCTD(温度、塩分プロファイルを計測する測器)観測の際、水中ホログラフィック顕微鏡を同フレームに取り付け、水深6,000mまで降下させながら取得したデータの一例が下の画像です。深海の生物や沈降する粒子を捉えています。


図9:(上)CTDに搭載した水中ホログラフィック顕微鏡
(下)降下中に捉えられたマリンスノーの一部
②赤潮域
香港付近において赤潮海域で観測された原因生物のひとつであるGambierdiscus属を捉えた画像です。



図10:(上)赤潮の原因生物の一種である藻類の復元画像
(下)同電子顕微鏡写真
その他のアプリケーション
・水質管理(水道の水源地や水処理施設、貯水タンクでのモニタリング)
・油田周辺での流出、漏出等による油粒子のモニタリング
等の目的で使用されています。
おわりに
本稿では、水棲微小生物または懸濁粒子の現場観察手法として水中ホログラフィック顕微鏡についてご紹介しました。Resolution Optics社では、さらに小型化した水中顕微鏡を開発中で、ROVや水中グライダー等の小型水中ビークルや係留系などの海底設置型の機器に搭載が可能となります。試料を顕微鏡下に持って来るのではなく、顕微鏡を試料の近くに持って行くことができるこの技術は、今後様々な分野で活用が期待されます。
筆者紹介
株式会社東陽テクニカ 海洋計測部 奥村 智
2012年6月東陽テクニカ入社。前職では各種海洋観測装置の運用・管理および観測支援に従事。

