
サスペンションの考え方

どうも、トンチャンです
立命杯2023お疲れさまでした

結果は優勝でした
ぎりぎりまで機体製作頑張った甲斐がありました(今回の優勝機体ではありませんが)
学祭やイベントなどで各大学現役さんや主催者さんに感謝感謝ですね
来年も行きまくります
さて、今回もXで要望ありましたサスペンションの考え方について書いてみようと思います
サスって障害物を楽に乗り越えられるようにする、操作の補助の役割になるものというのは共通認識だと思います
実は他にも色々な効果があるんですよ~
今回は私の考える効果を基本も含め紹介したいと思います
(※いつもの如く個人的知見でございます)
・サスの上限下限
障害物の高さを考えてみましょう
一番低いのが丸穴で15mm
一番高いのがすり鉢と丸丘で40mm
です(中央の十字山除く)
https://kawasaki-sanshinkaikan.jp/robo/wp-content/uploads/2019/03/2019ring.pdf
↑かわロボ公式リングの寸法
あくまで機体が地面に対して高さを変えずに走れるのが理想的になるはずなので、機体の大きさや種類によって異なりますが、大型機のような障害物を確実に跨ぐような機体は可動域が上方向に最低40mmは必要ということがわかります

サス機体を初めて作る人に有りがちなことが、サスアームの可動を上方向にしか設けないことです
上方向に可動すれば障害物に登る際には機体は高さを維持できます
しかし障害物を下る際には、機体の足が浮いてグリップが効かない状態になります
その状態を補うのが下方向です
機体が浮いた瞬間に足がすぐに地面に設置するのでラグが少なくなってグリップが維持しやすくなります
なので
上方向は衝撃吸収
下方向はグリップ維持
の効果があると思ってます
ちなみに下方向の可動域は自分の場合、機体の大きさ関わらず20mmは取るようにしています(機体コンセプトによって変えることもあります)
一番低い障害物が15mmであることと、一番高い障害物の角部はいずれもなだらかな形状、かつすり鉢はフィールドの端の方ということもありずっといるような場所ではないと考えているので、20mm有れば機体の底面を擦ることはないし十分だろうという考え方です
上下可動域をさらに増やしてもいいと思いますが、多面的に考えると強度確保や軽量化、設計難易度などに影響出るのでそこは人それぞれですね
これらの理由から
機体を自然に置いた状態で上方向に40mm、下方向に20mm
取るようにしています
・ダンパー
ダンパーはバネの振動を抑える減衰の役割がありますよね
そもそもダンパーをつける理由はなんなのか、自分は以下の点があると考えています
メリット
・足のバタつきを抑えて動摩擦ではなくなるべく静止摩擦でグリップさせる
たしか動摩擦より静止摩擦のほうが大きかったはずなのでグリップ材をうまく働かせるにはバタつきを抑えて振動させないようにする必要があります
・機体の急制動による不安定さを無くす
直進から急ブレーキやバックをする場面が多いかわロボはダンパーがないサス機体だと挙動が不安定になりやすいです
デメリット
・重量増加
・スペース確保が必要
・中に入れるオイル粘度の調整が必要
上の2つはわかると思いますが、特に3点目がとても大変なんです
さきほどサスアーム可動の上方向は衝撃吸収で下方向はグリップ維持と書きましたが、ダンパーを入れることでサスアームの可動スピードが低下しますので、
「機体挙動の安定さを狙いつつサスアームの可動スピードが低下しない程度のオイル粘度」を狙わなければなりません
これらの理由から、ダンパーは人によって意見がだいぶ変わると思いますが、自分の場合は無理に入れる必要はないかなって思ってます
ダンパー無しでも以下の項目でそれなりの対策が出来てしまうからです
・足の回転数を落として代わりに大きくする
・後述する「ギア個数&配置」
・足の回転数を落として代わりに大きくする
足のバタつきを減らすことで振動を抑えます
その反面、足の周速が落ちますのでその分足を大きくします
・ギア個数&配置
個人的にこの項目が影響大きいと思ってますので覚えておいて下さい
・バネ下重量
実車でも重視される項目です
単純に物は重いほど加速度を与えにくい(f=ma)ので可動部(ここで言うサスアームとその先)は軽いほうが可動スピードが速いので良きです
・サスアームの角度

サスアームの角度がキツイと以下のようなことが顕著に現れます
・サスアームがスムーズに動きにくくなる
衝撃を受ける方向とサスアームの可動方向が異なるので、サスアームがスムーズに動きにくくなります

・サスが可動したときと自然に機体を置いたときでホイールベースが変わってしまう



可動した際にホイールベースが変わるということは
足のグリップがサスアームの可動に抵抗を与えて、機体の操作感が変わることになります
ホイールベースをなるべく変化させない、衝撃吸収を効率化する意味でも角度は浅いほうがいいと思います
・サスアームの長さ
仮に上方向に40mmと下方向に20mm動くように設計する場合、サスアームは長い方が角度がつかない(=ホイールベースの変化少)のでなるべく伸ばします
・かわロボにおけるサスアームの構造
かわロボで多く目にするサスは2種類だと思います
・回転サス
・平行リンクサス
回転サス


軸1点を中心に足ユニットごと回転させる仕組みのサス
メリット
・構成部品が少なくて済むので軽量
・強度に優れた構造にしやすい、修理も比較的容易
デメリット
・足ユニットごと回転させるためサス可動時に足の上下動が発生する
平行リンクサス


足ユニットに平行リンクを組んで可動させるサス
メリット
・足ユニットは傾かないのでサス可動時に足の上下動が発生しづらい
デメリット
・構成部品が多くなるので重量増加、強度確保に工夫が必要
・設計難易度が高い
回転サスと平行リンクサスともに、ダンパーの項目でも出てきた「ギア個数&配置」によって人それぞれではありますが良い方向にも悪い方向にも傾くので、是非最後までご覧ください〜
・ギア個数&配置(メイン項目)
さあ、今回の記事のメイン項目でございます
ここまで比較的基本な内容(?)を書いてきたわけですが、この項目を意識すると機体の操作感がだいぶ変わります
回転サスの場合
仮にギア配置をこのようにします

紫線の部分がサスアーム部のギアだと思ってください
真ん中の青がモーターによって回されるギアです
機体が完全停止している状態から全力で前進することを想定してみます

この場合、完全停止→全力前進によって、機体が加速しきるまで前後のサスアーム内のギアに負荷がかかり続け、「足先からサスアーム根本(紫線の範囲)」まで擬似的に回転がロックすることになり、
青ギアがサスアーム(紫線の範囲)をそれぞれ上下に動かそうとしてくれます

これによってこの図の場合、前サスアームは下がろうとして、後サスアームは上がろうとします
このようにギアの回転方向やギアの個数、節の位置を調整してあげることでサスアームの動きをコントロールすることができます
自分が回転サスを使う場合はサスアーム(紫線の範囲)のギア個数を奇数にするようにしてます
機体が停止していて青ギアが回転していない場合を考えてみます
偶数にすると、サスアームが回転すると同時に足も回転してしまいます
平面に自然に置いた状態で上から押し付けたときに、前後の足でそれぞれ対抗する方向に回転してしまい、サスが自由に動かなくなります
奇数であればサスアーム可動によるギアの回転を相殺してくれるので足本体はほぼ回転しません
なので、モーターを回転させない状態でサスが可動する際に足が回転しないことが重要と思っています
さらに機体移動時に、進行方向に対して機体が上を向いて移動します(進行方向サスアームが下がって、進行方向と逆のサスアームが上がる、かつ荷重が進行方向と逆の足に乗るため)
自分の中の理想は
「平面に自然に置いた状態でもサスが自由に動いてかつ、前進時に前サスアームは上に動いて後サスアームは下に動く」
というものです
理由は後述します
なので、回転サスは重量が厳しそうなときのみに用いることが多いです
平行リンクサスの場合
平行リンクサスだと「平面に自然に置いた状態でもサスが自由に動いてかつ、前進時に前サスアームは上に動いて後サスアームは下に動く」が実現できるようになるので、個人的にはこっちのほうを好んで使います

赤線の足ユニット内にギアをもう1つ配置することができ、サスアーム可動によるギアの回転を相殺してくれるので、サスアーム可動時の足本体は回転しません
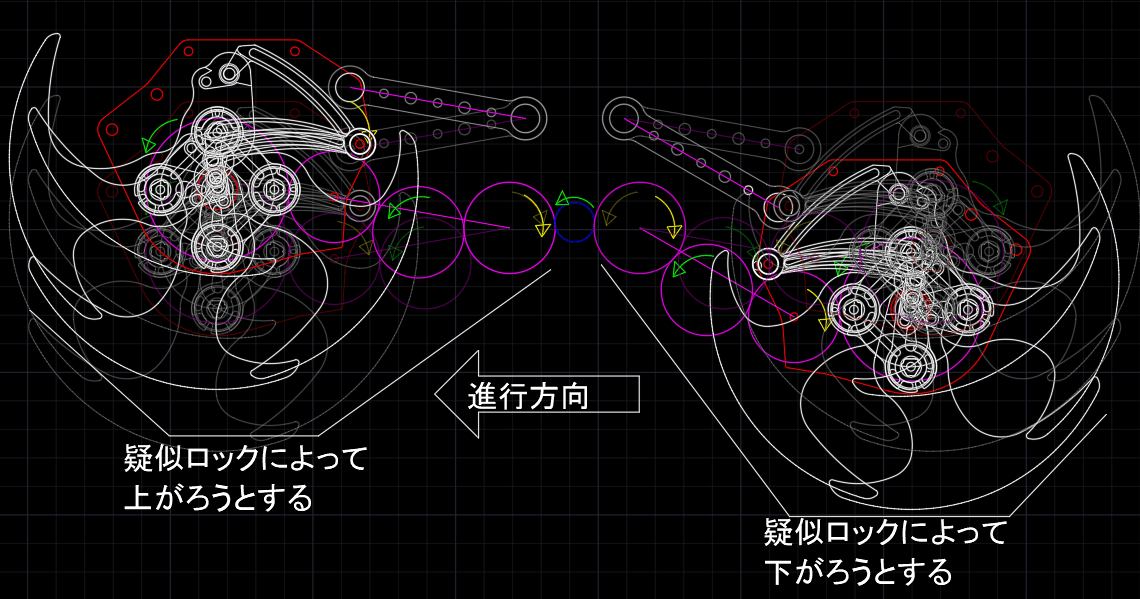
また回転サスと同様に、完全停止→全力前進によって「足先からサスアーム根本(紫線の範囲)」まで擬似的に回転がロックすることで、青ギアがサスアーム(紫線の範囲)をそれぞれ上下に動かそうとしてくれます
この配置で作った平行リンクサスの場合、前サスアームは上に動こうとし、後サスアームは下に動こうとします
つまり、前サスは障害物を乗り越えやすくなる方向にサスアームが可動しやすくなりますし、後サスはサスアームが沈み込みにくくなるため、ダンパーの効果も生まれることで短距離走で言うクラウチングスタートみたいなことができるようになります
さらに、後進時にはそれらの役割が前後逆になるので、急ブレーキ時・後進時にも有効になります
また、回転サスに比べて機体の姿勢が変化しづらいです(進行方向サスアームが上がって、進行方向と逆のサスアームが下がるので、荷重を進行方向と逆のサスアームが下がろうとすることで対抗するため)
これらの理由によって急制動に対応することができるので自分は好んで用います
・カウンターアーム機体への使用
ロッド機やシールド機などのカウンターアームを用いる機体には自分の場合平行リンクサスを用います
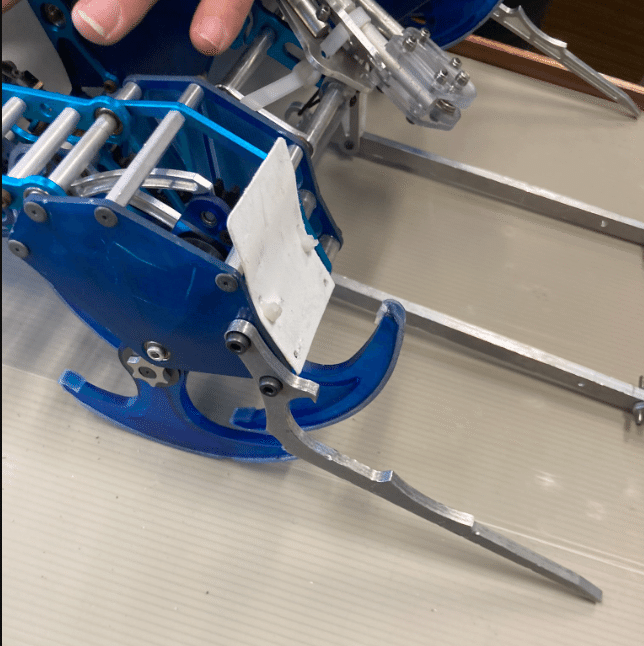


攻撃時には前足に負荷がかかり前サスアームが可動します
前サスアームが可動すると足ユニット本体が傾斜するのを利用してカウンターアームを接地させ、カウンター先端・前足・後足の3点で支えるので攻撃時の安定性を高められます
いかがだったでしょうか
サスペンションの考え方で操縦のしやすさが向上できます
参考になれば幸いです
2024/08/04追記:ギアの組み合わせ方は考え方でだいぶ左右されるので、優先順位を考えて設計を進めると良いかと思います
ではまた~