書記が物理やるだけ#211 PID制御-1

PID制御について,各部分がどのように作用するかを見ていく。
問題
説明
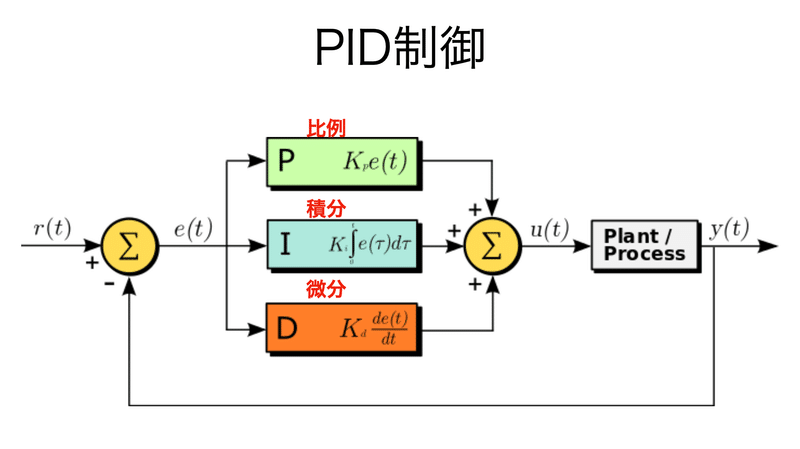
PID制御はフィードバック制御の一種であり,入力値の制御を出力値と目標値との偏差,その積分,および微分の3つの要素によって行う方法である。
解答
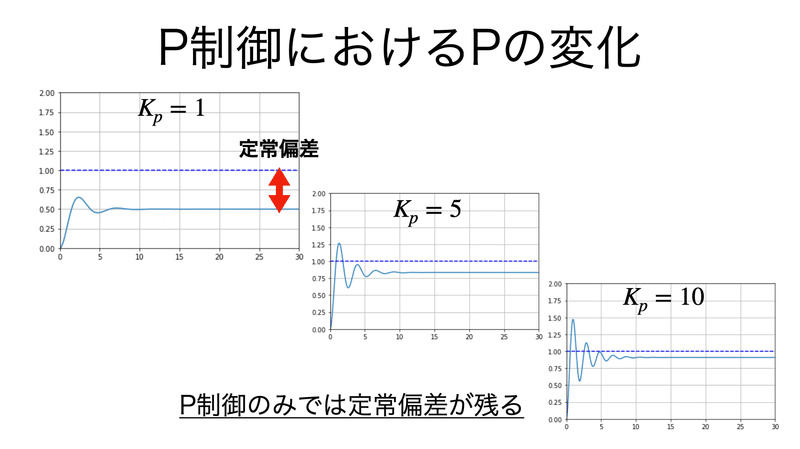
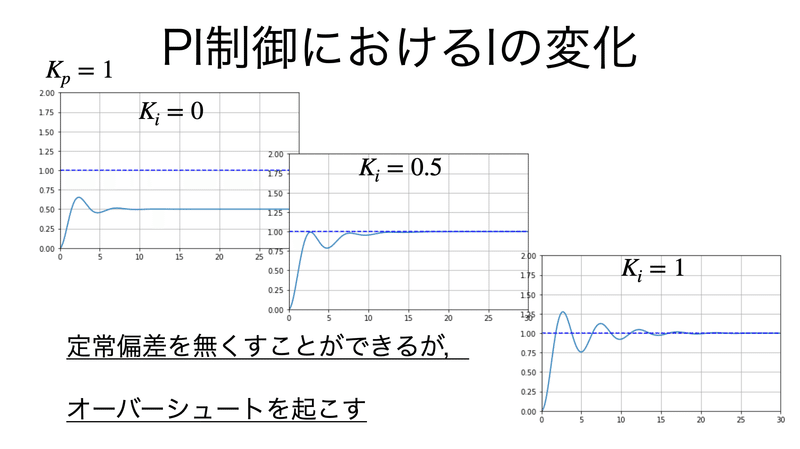
最も基本的なフィードバックモデルはP制御であるが,これだけでは定常偏差が残る。
これに積分動作を加えることで,定常偏差を無くすことができる。ここで,内部モデル原理は定常偏差を0にするために必要な積分動作の数を示している。
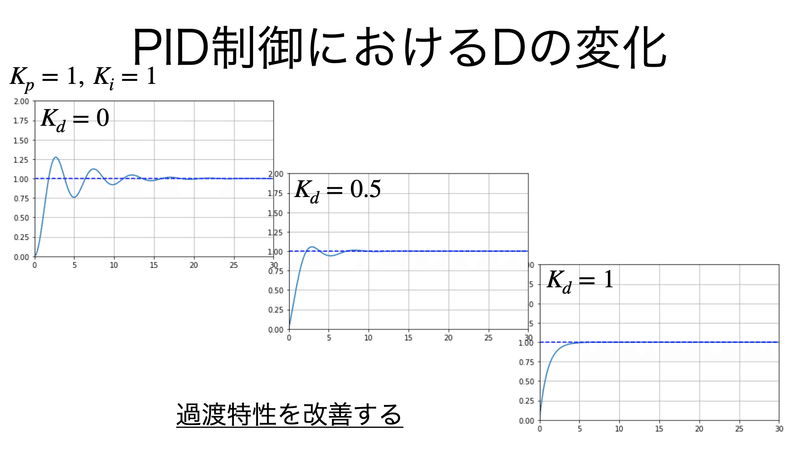
ただし,積分動作を大きくしすぎるとオーバーシュートやハンチングといった過渡特性の不安定性が出てくるようになる。
このことを手計算で示してみる。
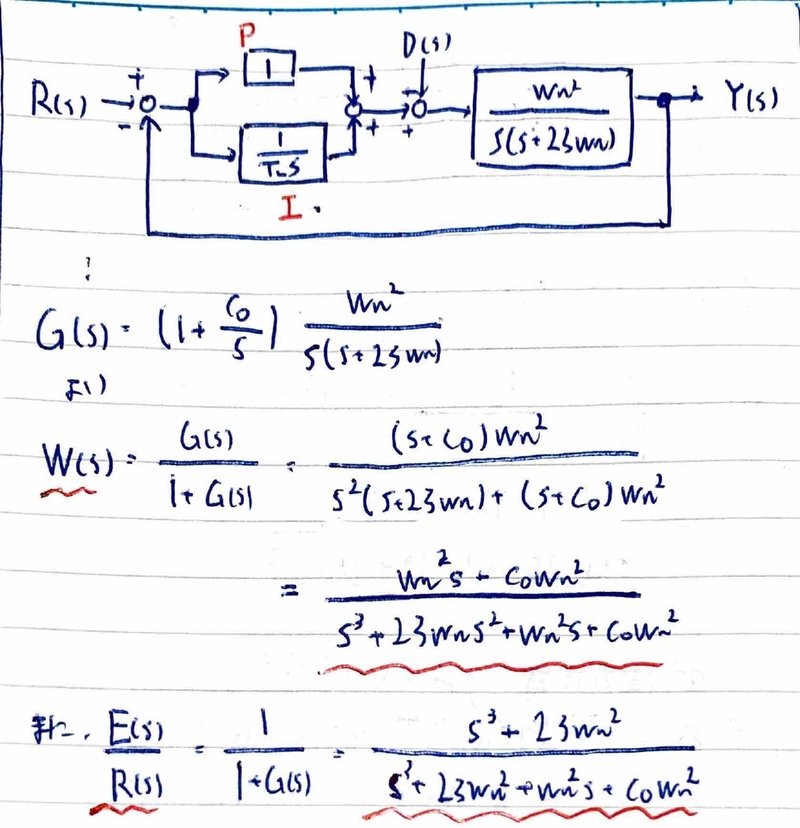
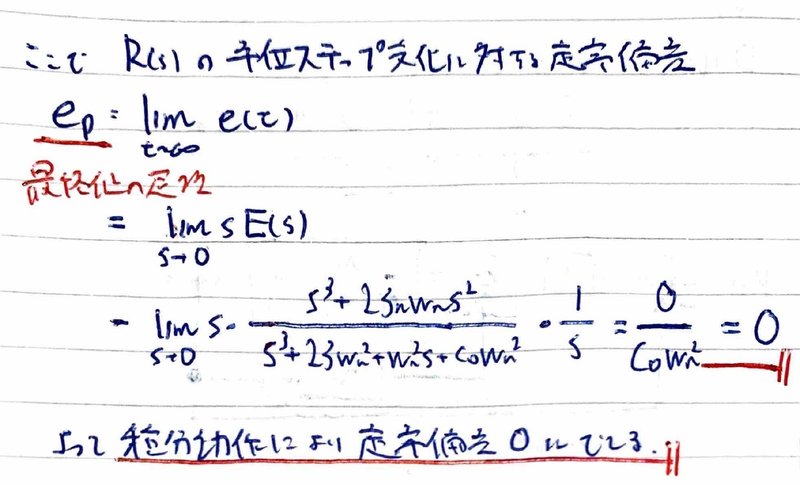
積分動作により,単位ステップによる定常偏差を0にすることができる。
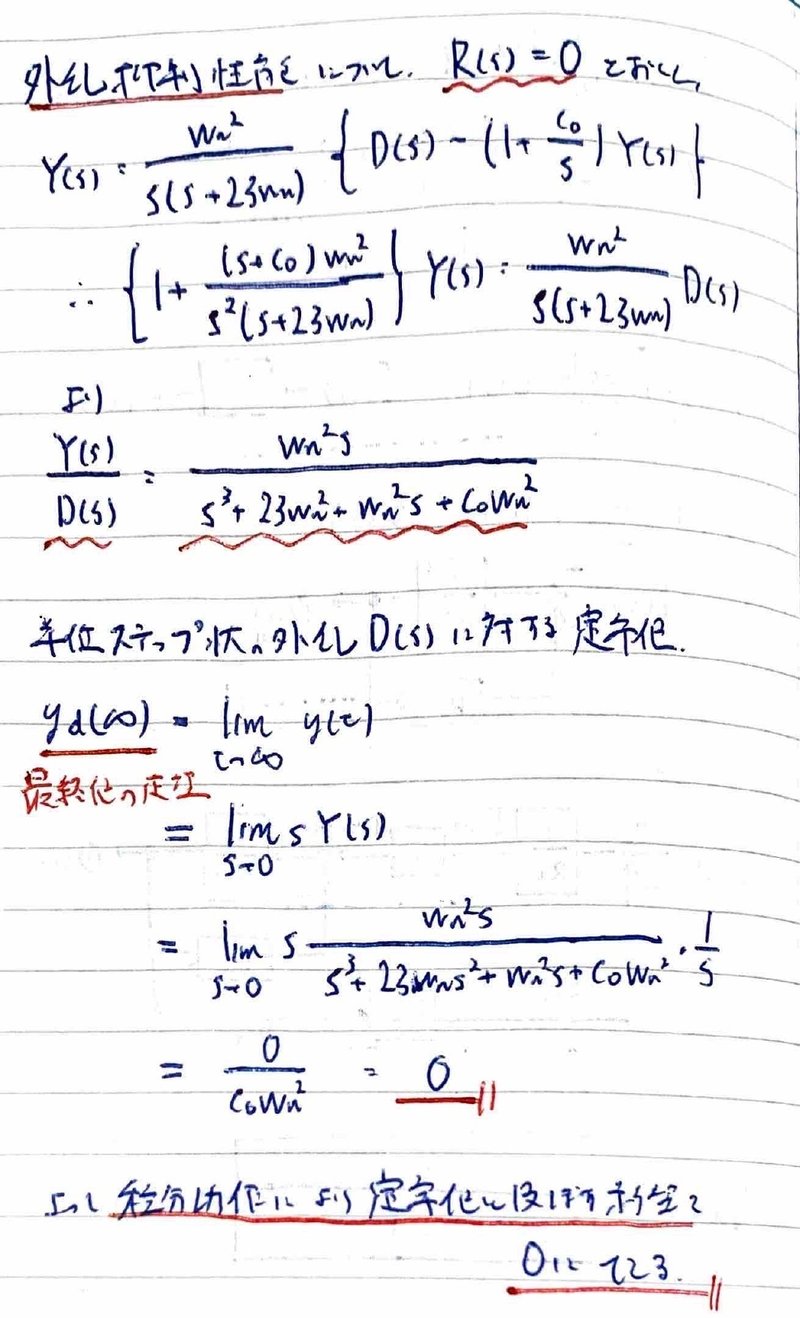
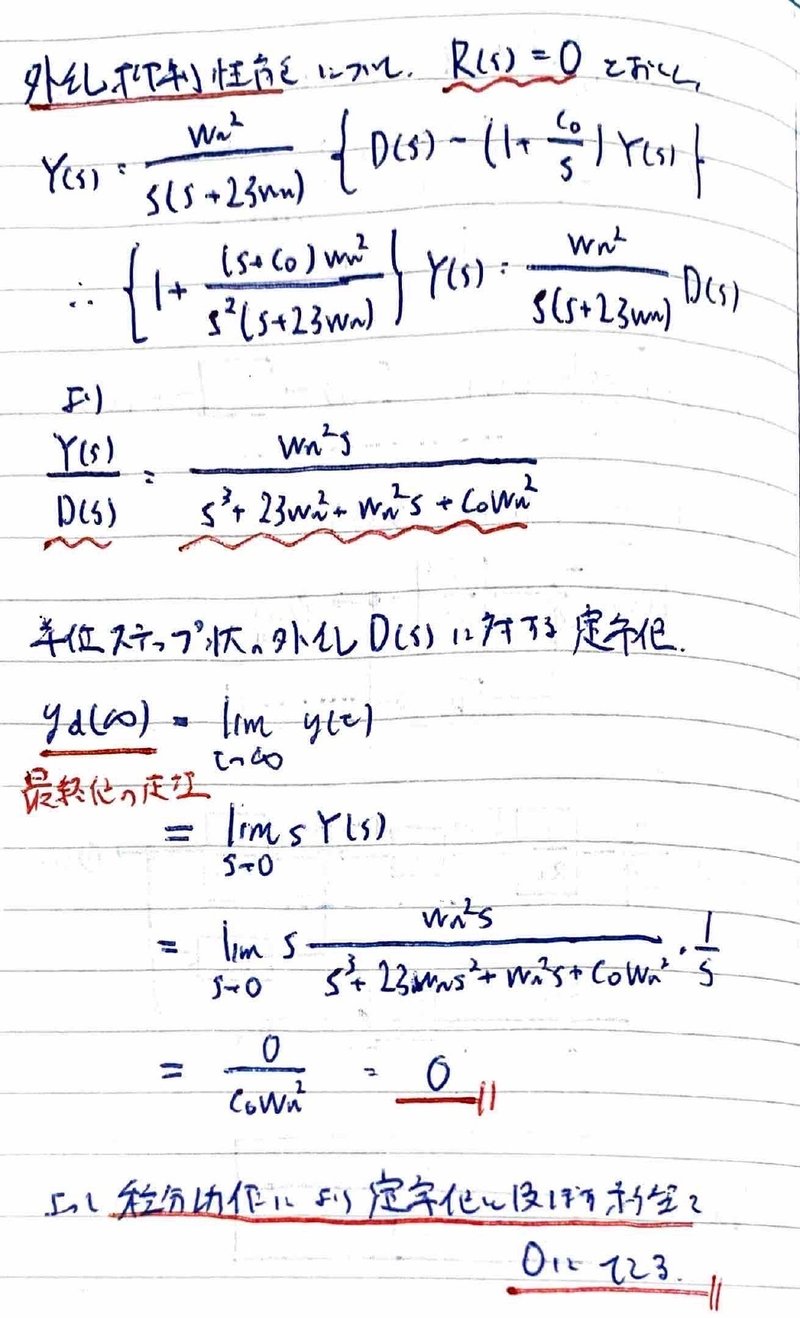
また,外乱に対しても定常状態に及ぼす状態を0にすることができる。
過渡特性を改善するには微分動作を加える。
このことは手計算により減衰定数が大きくなることからも言える。

微分動作をつける位置を変える方法もあり,同様に過渡特性を改善する。
本記事のもくじはこちら:
学習に必要な本を買います。一覧→ https://www.amazon.co.jp/hz/wishlist/ls/1XI8RCAQIKR94?ref_=wl_share