
ナビゲーションの基礎とは何か 〜現在地を失わない実行〜

※この記事はオリエンティア Advent Calendar 2023 の10日目の記事です。
オリエンティア Advent Calendar 2023 - Adventar
冬になると食べものが美味しいですよね。特に鍋なんかしてると夏野菜なんてものは名ばかりで、本当の野菜は冬にしか育たないんだ…なんて。
そんなことを考えたりします。今日はミセレですね。
京都大学3回生の石原潮人です。10日目を担当させていただくことになりました。快諾したものの、普段から色々と考える性格なので、何を書こうか逡巡した挙げ句、やっぱり普段から色々と考えていることを書くのが良いのでは?と思い至りました。そんなこんなで書き始め、やっぱり真面目なものが出来上がりました。それではよろしくお願いします。
自分は今年のルーマニアで開催されたJWOCに出場しました。今日はそこで感じたことをきっかけにして、自身のオリエンテーリングナビゲーションがJWOC帰国後から全日本ミドルロングにかけて、どう変化したかを話します。今までの自身のオリエンテーリングに欠けていたものは地図をベースとして常に現在地を把握し続けるナビゲーションでした。それはきっとオリエンテーリングの基礎にあたる部分で、だから自分がJWOC以降にやったことはナビゲーションの基礎をつくるということで、今日はその話をします。
自分は大学から始めて3年目にしては安定したレースをします。それは、性格の問題もきっとありますが、どういうナビゲーションをしているかという考え方と技術があってこそのものです。たぶん。
基礎をつくる…。ミスをしない…。それらはきっと小さな当たり前の積み重ねです。あまり面白くなさそうなお題ですよね。何当たり前のこと言ってるんだよ、と思う方はきっと居ると思います。それでも、「自分もあそこでミスしなかったらな〜」と思ったオリエンティアが「仕方なし読んでみるか」と思ってくれると幸いです。
【はじめに】
帰国
初めてヨーロッパに日本の代表選手として遠征をすると、きっと多くの人が悔しさを抱えて帰国することになります。海外選手との差はそれほどに圧倒的で、何に悔しさを感じたかは人それぞれでしょうが、自分にとってそれは上手さの差でした。慎重にならざるを得ない難易度の中で、気合を入れて臨んでも空回り。すぐにミスをして現ロスをして、頑張ろうにも頑張ることが出来ない状態がレースを通して続きました。「速くなりたい」のでは無く「上手くなりたい」と感じ、「もし自分のフィジカルを余すところなく発揮して走ることが出来たなら自分はあとどれだけ速くなれるのだろう?」と疑問に思いました。帰国後の自分のオリエンテーリングの方向性の大枠はこの辺りで決まったのだと思います。
帰ってきたら、情報を整理して今後の具体的な方針を立てるわけですが、方向性が定まるまでにはいつもどおり時間がかかりました。とりあえず現状を知るために、Liveloxのルートを見ることから始めることにしました。その後アナリシスを書きながら、他の選手との差はきっと自分よりずっと前からオリエンテーリングをしていることに由来する何かにあるんだろうと、そう思いました。自分の身近にも中高から(あるいはもっと前から!)オリエンをしている人たちが居たことはすごく助けになりました。JWOCの仲間をはじめ速い人が多くて大変です良い刺激を受けています。彼らとJWOCの前から競い合う中で感じたこと、会場などで話し合ったことがヒントなんだろうと思って考えながら過ごしました。
経験値の差がもたらすもの
Liveloxのルートを見たり、トレキャンやレースの中で
時に執拗に見えるほど道を辿っている(微妙なショートカットをあまり好まない)。
道に乗った瞬間に加速する。
マップコンタクトの多い区間の実行ほど正置が大事。
現在地をロストしない。
こういうことが気になりました。
リストアップしていく中で、基礎がしっかりしているかどうかが違うのだろうという気がしました。基礎とは何か。まだはっきりとわかっていなかったですけれど、テレインが見慣れなくても、難しいレッグが突然出現しても、細かいミスこそすれレースをまとめる能力。それが基礎かもしれないと考えました。
それが基礎だとして、経験を積むことが一つの正義だと言うところは事実だと思います。「こういうレッグ知ってる。こう行く。こういうミスするかも。」何度もオリエンテーリングをして、地図を見た時にそう思うようになっていけば、基礎が出来たと言えるのでしょうか?

あるフィンランドの選手のルート
ヨーロッパの選手はまっすぐ進むと聞いていたのでほんとに?と思った。
基礎とは何か アクセルとハンドリング
そんなある日、どこで見つけたのか、指導書の中のこんな文が目に止まりました。曰く、オリエンテーリングを運転に例えると「地図がハンドルで、コンパスがアクセルだ。最初に習うべきはハンドル操作だろ?」
おやっ!と思いました。この時から急に思考の断片が繋がりだした気がします。この表現で言う「コンパス」とはコンパス直進のことだと解釈します。
大学でオリエンテーリングを始めて僕が最初に習ったのはコンパス直進でした。直進は地図読めなくてもコントロール円やレッグ線があれば出来ますよね。大学によっては一回生に直進を教えることを禁止しているクラブもあると聞きますが、自分と同じように早い時期に直進を覚え、頻繁に使用した方は多いと思います!大学生からオリエンを始め、早期に速くなる方の多くが優秀なアクセルを持っていたのだという、そういう気がします。速さを求めて、アクセルをベースとしたルートプランニングの方法を見に付け、ミスを避けるために踏み込む強さを調節することを覚えていく。そうやって走っていたという人、必ず居ると思います!
そう考え、練習をして赤いラップタイムを取り、自分は速いと錯覚し、大きな大会に挑む。そこに居たのはハンドリングを身に付けた上で、自分と同水準以上のアクセルを踏み込む人たちの集団。その結果は火を見るより明らかです。勝負にすらならなかったのだなと。勝負では無いということは、つまり負けではない。
空白があってはいけない
「アタックから読め」そして「プランを組み立ててから脱出しろ」。これはたぶんオリエンテーリングを始めて、誰もが教わることだと思います。しかし逆に、教わらなければそうやって考える人は少ないという気がしていました。
自分のオリエンテーリングを振り返って、プランを組み立てて実行しようとして、プランを意識しすぎて現地を十分に見ていなかったのだと感じました。情報の取捨選択はオリエンテーリングの本質ではあるんですが、これが見えるはずだと思いながら進んでいると、進んでいる時に見える他の風景に意識が向かない。それはナビゲーションをしているようでしていないのと同じです。プランニングというのはきっと目的地に向かって、より効率的に進むための飛び道具であって、ナビゲーションというのは生来、もっと開かれたものなんだという気がしています。
プランが自分の思考を縛ってしまっている、もっと視野を開いて現地をよく見て進まないといけない
地図を読んで進むというのは、すなわち現在地を把握して進むということです。だから、空白があってはいけない。
地図の中に出来た空白を、プランニングという思考法で橋渡しして、ナビゲーションをしている気になって進む。それが自分の姿でした。だから、これから目指すのは「地図をベースにしたオリエンテーリング」だと決めました。
【地図ベースのオリエンテーリング】
ここからは、地図をベースにしたナビゲーションについて説明します。その前に、ここで、これまで時系列的に話を進めてしまったので具体的に何が問題だったのかを整理します。下の図は自分の当時のオリエンテーリングのシステムを簡単にまとめたものです(少し見にくくてすいません)。
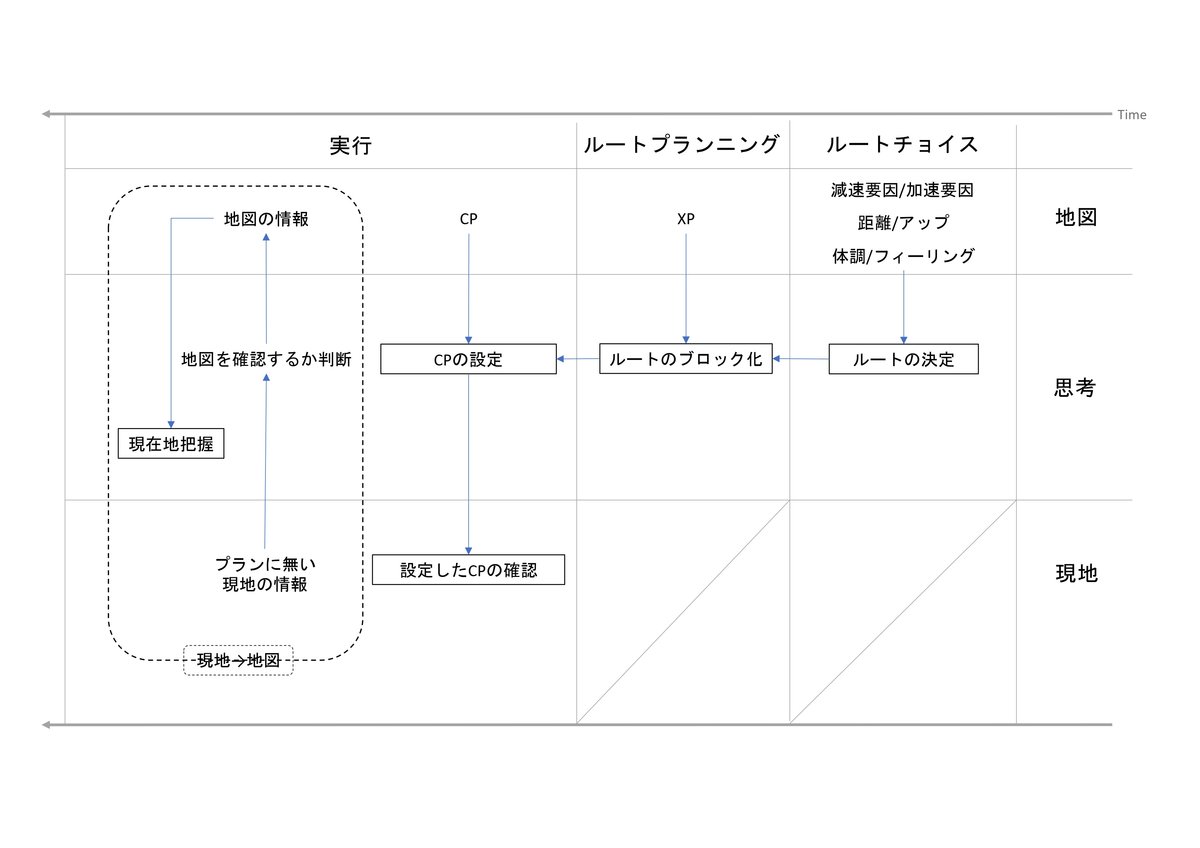
ルートチョイス→ルートプランニング→実行の順番に、地図(インプット)、思考(処理)、現地(アウトプット)のそれぞれの階層での手続きをまとめています。さるオリをモチーフにした標準的な型のはずです。
問題となったのは、現地がプランを実行する(アウトプット)の場となってしまっているということです。基本的な矢印↑が思考→現地の方向を向いていますよね。このシステムの肝となるのは思考(プランニング)であって、実行とは設定したCPを回収する場所でしか無いです。
どこでミスが起きると思いますか?
思考の部分です。CPの設定にミスや遅れが生じます。そしてその異常は少し経ってから設定したCPが回収出来ないという事態として検出されます。ここで、現地との双方向性が確保されていないという問題が効いてきます。このシステムでは主にCPにより現地認識をしており、ナビゲーションの効率化を図る中でCP以外の現地のものを捨象しています。その結果、CPというアンカーが無くなると、現在地に対する確信度が大きく下がり、対応が後手に回ります。
解決法の一つとして破線で囲った現地→地図へと向かう情報の流れを考えてみましたが、これは寧ろCPの設定が追いつかない時の予備策として用いることが多かったので、あまり解決にならなかったです。逆にCPを考えずに走り出してしまったり。一つの方法はリロケートのシステムを分厚くすることで、去年の石尊山の春インカレに向けては専らこれをやっていました。とはいえ、プランのミスはレースの終盤など、避けられないもので、ミスをした時点とそれに気づくまでに乖離があることが構造的な欠陥だということです。
実行とはプランを「実行する」だけの場では無い。現地から情報を得ることが重要。
ここから地図ベースのナビゲーションについて話しますが、最初に今どういうナビゲーションをしているかを貼っておきます。この図の説明は最後にしますので今は見ても見なくても大丈夫です。

地図をベースにするというのは、常に現在地を把握しながら進むということです。常に現在地を把握しながら進まないことなど無いと思うかもしれませんが、例えば道を走っていても、「これが見えてくるまで進む」と思っているならそれはその時点での現在地を把握していないことになります。直進というプランを立てた時も現地と地図が対応していない状態でとりあえずコンパスを見て進むことがあると思います。
現在地が不明瞭でも進む、というのはナビゲーションのベースがプランニングにあるということです。地図と現地の対応よりも直進というプランが優先された結果、現ロス状態でのナビゲーションが始まります。地図をベースにする基準では現在地が不明瞭であることはナビゲーションの破綻を意味します。
つまり、地図ベースのナビゲーションの本質は現在地把握にあります。
地図には様々な情報が描かれていますが、ナビゲーションに必要とされるのは現在地を把握することの出来る情報です。それらをナビゲーション単位と呼びます。地図上からナビゲーション単位を抽出してそれぞれをつなぎ合わせながらポストへと向かう行為が基礎的なオリエンテーリングです。
ナビゲーション単位のあれこれ
ナビゲーション単位とは森の中で現在地を把握することの出来る情報で点、線、面に分類されます。点は現在地を把握する最小の単位です。しかし、オリエンテーリングが移動するスポーツである以上、ナビゲーションにおいて最も基本的な単位は線になります。また、面でテレインを分割することでナビゲーションをより余裕を持って行えることがあります。どういう情報が現地で目立って認識出来るのか、辿ることが出来るのか、感じることが出来るのか、はテレインやナビゲーション速度、特徴物に対する進入方向によって様々です。これは現地で見たものが地図に描いてあるのかどうかということと表裏になっていて、たぶん、ほんとに奥が深いです。毎週日本各地にオリエンに出かけて行って地図を読みながら走り回っていたら、段々とわかっていくものなのかなと思っています。
オリエンテーリングにおいて現在地は必ずしも点の単位で把握する必要は無く、要求される精度に合わせてナビゲーション単位を使い分けることが良いとされます。コントロール付近では精度の高いナビゲーションを求められることが多く、点単位を使用したり、複数の単位を重ね合わせることで対応することもあります。

自身をより一層コントロールすることが求められるから。
現在地を線で把握する、について補足します。例えば、道を走っている時に自分の現在地はこの「道上のどこかだ」と思うのはまだ自分の位置を点(一次元)で認識しています。道の横にコブがあれば「あ、道上のここだ」となりますよね。そうでは無くて、自分を「この道だ」と思う感覚です。自分自身をある程度の長さを持った線分として認識する、というのが正しいのかもしれません。
ここで言う線分は線状特徴物のうちある属性を持った区間として定義されます。道のうちある曲がりから曲がりまでの間が直線であるのならば、その直線区間はナビゲーションの単位として使うことが出来ます。

この夏フィンランドに行っていた一つ下の後輩(匿名)が言うには
「一緒にいた海外の選手たちは普通ラインとは見えないようなところでも
ラインとして捉えて進んでいるような印象を受けた」とのこと。
また、面によりテレインを分割すると、ナビゲーションの尤度が広がることがあります。面の単位は視野を広くもつことで認識することが出来ます。ここで言う面は例えば1つの尾根というような塊を含みます。
レッグを見た時はまず面の単位を抽出することにしています。これは自分にとってのシンプリファイとも言えるもので線の単位や点の単位を取り間違えた時にも現在地を失わないことに役立ちます。面で最初にレッグの付近の地形を分割した上で、実行に合わせてその上に線を書き込んでいくという二層のナビゲーションをしています。また、面だけでポスト付近まで行けるという場合もあります。

A~Dは異なる性格を持った面だと言える。
正置が大事だということ
地図ベース、つまり地図の情報を繋いでいくことでナビゲーションをするという方法を始めて、すぐに気づいたことがあります。
正置されていなければならない
何を当たり前のこと言っているんだと思った人は、逆にこんな当たり前のことが出来てない人も居て、そういう人でもまずまずナビゲーション出来るんだということを知ってください。ほんとにJWOCまで正置が出来てませんでした。
そもそも正置というのは、個人的な解釈では「方向の情報」です。森の中に自分という点があった時に、それがどっちを向いているかを正しく認識するというのが正置をするということです。イメージとしては、下図のように現在地を点じゃなくて矢印で見る感じです。矢印の向きが間違っていたり、「この分岐に居るんだけど、伸びている道のそれぞれがどれなのかわからない」時みたいに、ただの位置情報しかもっていないと正置が出来ていないと言うことになります。
自分がどちらを向いているか脳内で認識していれば良いので、必ずしもコンパスの北と地図の磁北線を合わせる必要は無いわけです。でもコンパスを用いてそう合わせてやれば、地図を見た時にそれがそのまま正置された情報となり、楽にナビゲーションが出来るというわけです。厳密に議論するなら、脳内が正置されていることと、動作としてコンパス正置をしていることを区別するべきでしょうが、ここでは気にしないことにします。
正置されていなければならないというのは、これまでよりも特徴物の形状に合わせた方向変化が多くなったことが原因です。従来はコンパスの示す方向がベースになっていたのでその軸をもとに脳内が正置されていれば多少地図を回転させる動作を怠っていても支障は少なかった気がします。処理量が増えるとどうしても。また地図ベースの考え方で点単位を使用する時は正置を怠るとミスをする可能性が高いです。逆に線の単位は方向の情報があるので正置と相性が良いです。

BOBコンという名前でも親しまれている。正置がしやすい。
正置を体が動作として習得してくれると、ナビゲーションをミスした時に早めに「正置されていない!」という情報が伝わるのでリカバリーが速くなります。加えて、頭に負荷をかけていたことを動作で代替出来るので、ナビゲーションに必要な脳のリソースが減ります。それはレースの後半において、集中力の低下などによるミスを減らすことに繋がります。「身体にナビゲーション負荷の一部を移す/正置は身体で行うナビゲーション」という考え方も出来ると思います。
遅いオリエンテーリングを速く走るために
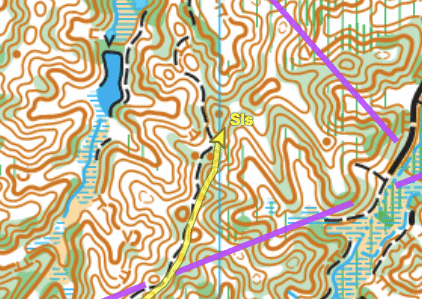
ここまでの流れの整理をして終わりとします。まずは、下の図を見てください。
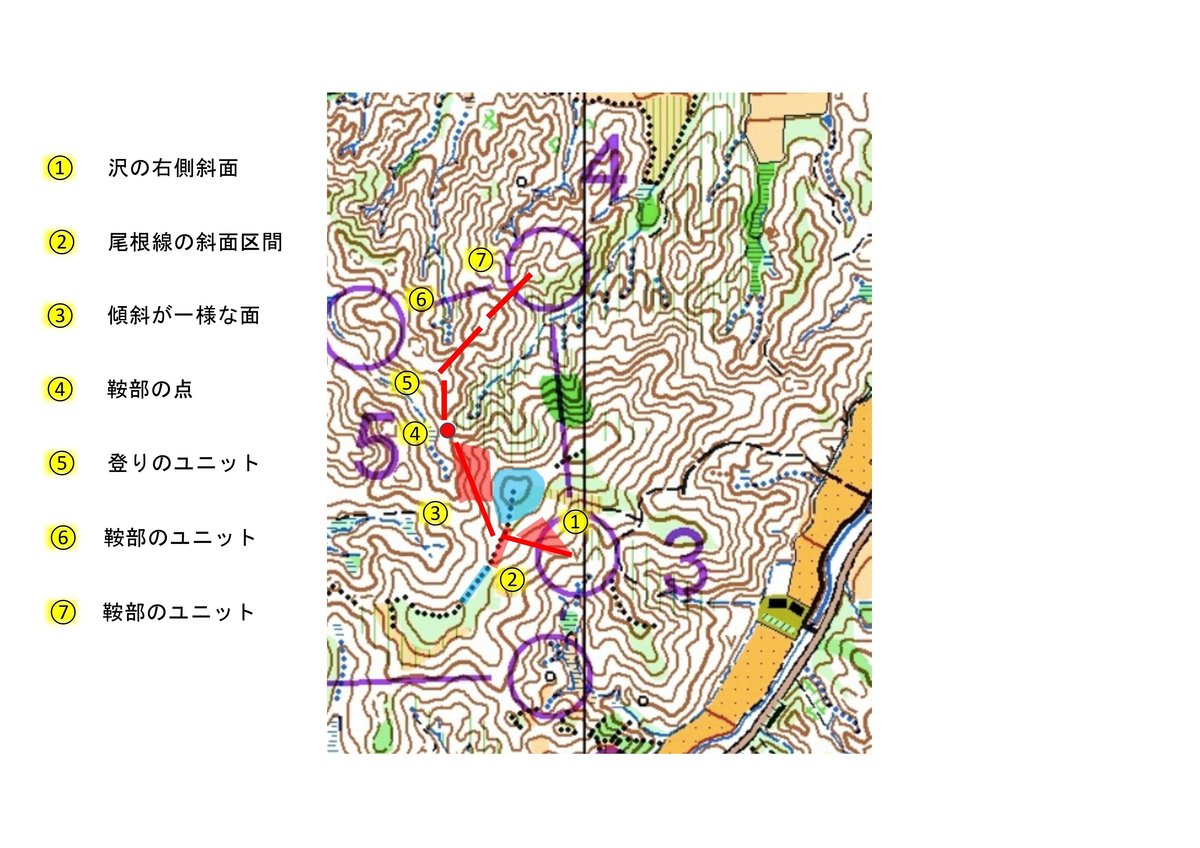
※②は左の尾根線と右のピーク(水色)とは違うとわかる区間
明確な区切れが現地にあるわけでは無いけどナビに支障は無い。
今回は実行について考えました。なので、3番ポストで、どういうプランを立てているのかでは無く、3→4の実行中に自分が現在地をどれくらい頻繁に更新しているかを話しているので注意が必要です。何回読図をするかを表しているとも言えます。
このレッグでは現在地単位を①〜⑦の7回繋いでいます。それぞれの単位は読図を必要としないレベルに細分化されているので、例えば、③を走っている時に面の中の沢を読み加えたりはしないですし、⑤も登りが終わるまでは他のことを考えて先読みをしたりします。
現地から常に情報を取っているわけでは無い。
情報を取りすぎると遅いので、自分がどれほどの情報密度のナビゲーション単位が要求されているかを予め把握して進むようにしています。それが自分にとってのプランニングです。例えば、少し前の話になりますが、朝霧根原の富士山麓大会では小ピークも岩も全部見ると思いながらレースをしました。この例えはレース全体を通した戦略ですが、それをレッグ毎に判断することをプランニングだと考えます。
現地から情報を取得することに重点を置き、かつ要求されるナビゲーション密度を判断するということを踏まえた自分のプランニングは下の図のような感じになっています。若干説明のためにはっきり書きすぎたなと思っていますがご了承ください。実際は今までの方法と混ぜ合わせて運用しています。

まずは、レッグを見た時に、レッグ全体を含む大きな視野でテレインを面に分割します。これをシンプリファイと呼んでいます。
次に減速面の情報(減速要因はたいがい面状)と強いライン(加速要因)を加えて、あとはその他諸々を総合して、ルートを大まかに決定します。詳しくは平岡丈さんのアドベントカレンダーを。
この段階で、どれくらいの精度のナビゲーションが要求されるかがわかります。面単位の階層が充実している(視野を広く持った時に既に現在地がわかっている)場合は現地から点の情報を拾う必要は無いですね。
実行においてはルート付近のナビゲーション単位を地図から抽出して、現地で見える単位を抽出して、それらを一致させながら進みます。線の単位を走っている時はわりと暇なので、この操作は単位同士を繋ぐ時に行うイメージです。地図と現地がそう一致するものかと思われるかもしれませんが、基本的に正置されていれば接続はスムーズに行きます。なので正置の情報も常に確認しています。ナビゲーション単位として使用している特徴物の種類と方向があっていれば概ね間違っていないところにいる気がします。
【おわりに】
現在地を把握するということがナビゲーションの基礎であり、常に現在地を把握し続けていればミスは起こらない。
そういう考えをもとに、常に現在地を把握し続け、かつ遅くは無いようなオリエンテーリングを模索しながら、実行におけるナビゲーションについて見直しました。大事なことは常に現地に対して自分を開くということなのかなと思っています。全ての情報を地図と対応させ続けるのでは無いけれど、どこを走っている時でも自分が走っている場所の特徴を広い視野で捉え続けることが、今までのオリエンテーリングには欠けていました。
ミスをなくすというのは、面白くない話ですけれど、現地をよく見て、地図をよく見て対応させるということが、そのための1つの結論であるとするならば、そこにはナビゲーション本来の楽しさがあると思いませんか?少なくともプランニングやコンパス直進が現地の情報と乖離して独り歩きしてミスが起きるような事態よりよっぽど良いと思います。
来る日も来る日も
今回は主に考え方について話しました。すでにわかっている人も居ると思いますが、これは遅いオリエンテーリングです。マップコンタクトが求められ、方向変化が多く、空白を許さないからです。ですが、やっていることは現地と地図をナビゲーション単位毎に対応させていくということの繰り返しです。その動作を1つ1つ、来る日も来る日も数え切れないくらい繰り返すこと。きっとそうやってオリエンテーリングは速くなっていきます。
スタートで地図をめくった瞬間から、自分の現在地が前にも横にも広がって行き、その範囲の中にいる限りは迷う気がしないと思えるような、そしてそんな状態で全力でポストに向かって走る、そういうオリエンテーリングが出来たら良いなと思っています。
長くなりましたが最後まで読んでいただきありがとうございました!これで終わります。
この記事が気に入ったらサポートをしてみませんか?