
人力ヘリコプターのエネルギー収支

有人ドローンに未来はあるのか(前編)
無人/有人の飛翔体ドローンが縦横に飛びかう未来が想定されているらしい。有人ドローンなどは遊びや趣味の範疇であり、今の開発線上で人を乗せてそれを商業化するなど正気の沙汰ではないと、苦々しく否、腹立たしく思っているのだが。
人力ヘリコプター YURI-1
交流のある中部大学の先生から電話が入った。2年前のことである。各務原航空博物館のバックヤードを見学させてもらえるらしい。お目当ては内藤晃さんの YURI-1 だ。行きますと即答した。

内藤さんは惜しくもシコルスキーの人力ヘリコプター賞の目標に届かなかったが、氏の飛行が世に示された以降、世界の人力ヘリコプター飛行家は内藤YURI型をベースに同賞の達成を目指した事実は、内藤さんの歩みの正しさを証明している。YURI は内藤さんを支え続けたピアノ家の奥さまの名であった。
YURI-1は4ローター形式の人力ヘリコプターとして開発され、世界で初めてそのホバリング能力を知らしめたのだ。

機体を拝見して、物凄い軽量化の努力が素人の私にも伝わってきた。部材接合の技、引張荷重と圧縮荷重を耐える部材の細かな選定、そして動力伝達方式の秘儀。
分解保管されている機体を拝見するうちに、継手の位置に疑問をもち分解輸送の観点からですかと質問したら、制作工房の大きさに問題があったからと聞いた。なんとこの機体を設計製作された内藤晃さんは、これを自宅で作られたのだった。世界で闘うに、もうすでにここから内藤さんは大きなハンディを背負っている。いかにも日本であると。
ローターはその回転軸のプーリーに撒きつけられた紐を、自転車で使うペダルで巻き出すことによる。その紐は機外へ繰り出されるだけで回収されず、予め撒きつけられていた糸が尽きたら、人間エンジンの余力はあってもそこで動力伝達は終わりだ。
この紐がプーリーから巻きだされる際に些細な不手際でもあれば、大きな抵抗を生むであろうことは容易に想像できる。当時73歳の内藤さんは自ら4つのプーリーに駆動紐を撒きつけたのだった。余人に手だしできない領域だったと云う。
上の動画は1994年3月7日に高度20cm、滞空時間19.46秒の日本航空協会JAA公認記録達成時のものでパイロット(エンジン)を務めた池内紀勝氏がYouTubeに残したものだ。
そしてこの機体はシアトルでは試験飛行なしのぶっつけ本番で飛行させ、高度30cm、滞空時間24.0秒の当時の滞空世界記録を達成した。
ツバメとアホウドリの飛行から想像できること
なぜドローンの話しに、人力ヘリコプターのことを書くのか。飛翔体が空に浮くエネルギー収支のことを考えたかったからだ。
ヘリコプターの空中停止ホバリングを考えるのだが、飛行機に比し大きな不利益を持っている。
我が家にはほぼ毎年ツバメが巣をつくっていた。そこで孵った雛たち、ある日から一斉に羽ばたきの練習を始め、そして巣立ちの日を迎える。
玄関口の奥まった場所からの離陸は大変なのだ。元気な子から飛んでいく。だから4羽目の最後の子は実に危なっかしい。その子は離昇できずへたへたと地面に着いてしまった。親鳥が交互に奥まった狭小な空域を、本当のツバメ返しで何度も低空飛行し再チャレンジを促している。4羽目は再度羽ばたき、よたよたと空に吸い込まれていった。
彼等はしばらく我が家の周りを飛んでいたのだが、開いていた2階の窓から1羽が迷い込んでしまった。室内でホバリングしている。窓の外では親鳥や兄弟が急旋回しつつ鳴いている。室内のツバメはついに力尽き、床についてしまった。私が窓の外に誘導してことなきを得た。
あるいは飛行フォルムの優雅なアロバトロス。日本ではアホウドリと呼ばれている。
アロバトロスはグライダーに匹敵する長細い翼幅スパンをもつ。つまり縦横比アスペクト比が大きい。海鳥は離陸した以降いつ着陸できるか分からない。だから最少のエネルギーで最長の飛行距離なり飛行時間を稼ぎたい。そんな彼らに神さまは長いスパンの翼を与えた。長いスパンは翼端での翼端渦や圧力損失の割合が短いスパンの翼に比し小さくてすむ。だが陸鳥のように俊敏に羽ばたくことができない。だからどうしても離陸滑走を必要とする。単位時間あたりに翼を通過する空気の量を増やしたいからだ。
垂直離陸できないアロバトロスの捕獲は、いとも簡単であるが故の「アホウ」ドリであるわけだ。
これらの鳥の飛行から想像できることが3点ある。
①離陸のために滑走ができるなら楽そうだ。
②ホバリングや停止状態からの直接離陸は大変そうだ。
③地面が遠い場合のホバリングより、地面近くでのホバリングの方が幾分楽そうだ。

YURI-1の飛行を運動量理論で考えてみる
そこで内藤晃さんの人力ヘリコプター YURI-1 を題材に考えてみたい。
同機は半径5mのロータを4基もつ。
1基の円板面積は、S=π×5^2=78.54 [m^2]
ここで^はべき乗で^2は2乗を示す。
またここで [ ] は単位を示すことにする。[m^2] は平方m。
ロータ4基による全円板面積は、St=4×S=314.16[m^2] であり、
これを1つのロータに代表して置き換えると、
この代表ロータ半径 Rt=(St/π)^(1/2)=10[m] である。
飛行機やヘリコプターの飛行原理を説明するのに翼上下面の気圧差を用いられることが多いだろうか。その例に習うとその気圧差は結果として翼を通過した空気を下方に押し下げる。そこに着目すれば、その押し下げた空気の反作用で飛んでいるとも説明できる。これを運動量理論からの説明などと云う。
小さなラジコンのヘリコプターかドローンを重量計の台に乗せる。その上でこれを飛ばすのだが、ロータからの吹き下げ流を全て受け止める十分な面積の台であることが条件だ。
そこで先ずロータ静止状態で機体の重量を確認し、次にその上でホバリングさせる。ホバリングが安定したところで重量計の数値を確認すれば、台の上に静止していた数値と同じ表示であることに驚かれるだろうか、それとも当然だと思われるか。
飛行機もヘリコプターも運動の第3法則、作用と反作用で飛んでいることが実感できる。もっとも飛行機の翼から生ずる吹き下し流を計測できる量りはないし、ヘリコプターも前進を始めたら同じく計測不能ではあるが。
YURI-1 の飛行重量はパイロット(エンジン)込みで88kgだった。これをホバリングさせるにはどれぐらいの風を下に吹き下せば釣り合うのだろうか。
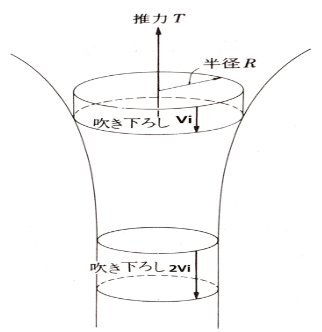
ホバリングでは同機の十分上方にある空気は、相対的に停止しており速度0だ。ロータブレードの回転によりロータ回転面上部の空気は、その回転面を通過して下方に押し出される。
これからがこの運動量理論の大事なポイントなのだが、ここでロータを通過した空気は、その直後に誘導速度 vi (吹き降ろし、downwash)をもち、それがさらに十分後方においては(回転面を通過した空気が単位時間になした、仕事量と運動エネルギーの増加は等しいことから)2×vi の流速をもつことになる。
ここのところをもっと知りたければ是非ヘリコプターの入門書を読んでいただきたいと思う。ここでは結論だけを示す。
ホバリング時のロータ面推力 T は、
T=ρ×π×R^2×vi×2vi ・・・・・・・・・式①
これを変形すれば 誘導速度 vi は、
vi=(T/(2×ρ×π×R^2))^(1/2) ・・・・・式②
上式でこれから使おうとする単位を確認しておきたい。日本人、なかでも私のような老人に馴染みのある単位を使いたいと思う。
Tは推力だから例えばバネ秤で測れる [kg] を使う。
ρは空気密度であり海面上標準大気限定として簡便に使うときは、1/8が便利だ。その単位は [kg・sec^2/m^4] 。
πは円周率。Rはロータ面の半径で[m]である。
そうするとviは自動的に [m/sec] となり、これはそのまま風速として理解できる。
そこで内藤晃さんのYURI-1を飛ばしてみる。
ホバリングでは推力Tは飛行重量Wと釣り合わなければならないから88[kg]の推力が必要だ。この時のロータ面での吹き下しの流速 vi を求める。代表してRは10[m]だったから、式②に代入すると1.06 [m/sec] となる。その下流では絞られて2.12 [m/sec] の吹き下しが存在していることも頭に入れておく。
この運動量理論では理想的な流体の振る舞いや、ロータブレードも魔法のように空気を均一に加速し、しかも損失がないなどとの前提がある。損失のことは後で考えるとして、まずそのような理想的な状態でYURI-1がロータ面位置で、1.06 [m/sec] の誘導流速を作り出すに必要なパワーを計算しておきたい。
パワーは仕事率でジュールやワットで表現するのがトレンドらしいが、ここでは昭和テイストの馬力で考えたい。
理想的な YURI-1 がホバリングに要するパワー [kg・m/sec] は、推力 [kg] に誘導速度[m/sec]を乗ずればよい。即ち、
P=88[kg]×1.06[m/sec]≒93 [kg・m/sec] であり、1馬力=75[kg・m/sec]で除せば、この機体のホバリングに1.24馬力が必要であることが分かる。
これは理想値でありヘリコプター効率を80%とした場合、1.55馬力の供給が必要となる。世界的な自転車競技の選手でも短時間1.2馬力(900Wワット)ほどが限界と聞く。なぜこれで飛べたか。その秘密は地面効果だった。
ロータが地面近くにあるとき効率がよくなり、それが地面のより高いときに比べて小さなパワーでホバリングできるのか不思議に思っていた。だって運動量理論によれば空気の加速が揚力の源なのに、地面の存在は誘導流を減速させるではないかと。
飛行機の翼も地面効果がある。操縦してみれば身に染みて体感もできる。飛行機もヘリコプターも同じだが、翼素理論によれば誘導流速の減少により誘導抗力が小さくなり、その結果揚力の垂直ベクトルが増加すると説明される。また誘導流が外側に捩じられることにより翼端渦が小さくなり翼あるいはロータの効率を向上させる。
運動量理論では、ロータ面下流の流れの広がりは、ロータ面上流の流入空気にも影響を与え、真上だけでなく斜め上方のより広い空間からも流れ込むようになり、単位時間当たりの空気流入量が増加すると説明される。

動画でも確認できたように YURI-1 のホバリング高度は公式に 20cm とされている。4つのロータを1つに代表した場合のロータ直径は 20m だったから、ホバリング高度のロータ直径との比は0.01だ。
これは私の実機経験とは別の世界であり、そんな領域の定量データは見たことがないのだが(上の図表では欄外だ)、体育館の床の上でのホバリングを前提に、ロータを機体構造の下部に置くことで実現できた。
この地面効果外(OGE、Out of Ground Effect )でのホバリングには理想値で1.24馬力、ヘリコプター効率80%とした現実的な場合は 1.55 馬力が必要だった。自転車の選手でもできないことが YURI-1 できたのは超低空の地面効果内(IGE、In Ground Effect)であることによる。
シコルスキー人力ヘリコプター賞では、人力で60秒以上浮揚する他、一度は10ft≒3mに達することの条件が付けられていた。後者はYURI-1には無理でもう一工夫が必要であったことがわかる。
後編につづく
経済産業省 ドローン関連予算
https://www.meti.go.jp/policy/mono_info_service/mono/robot/drone_yosan.pdf
この記事が気に入ったらサポートをしてみませんか?