全国大会機紹介①

こんばんは!MiMi*です。
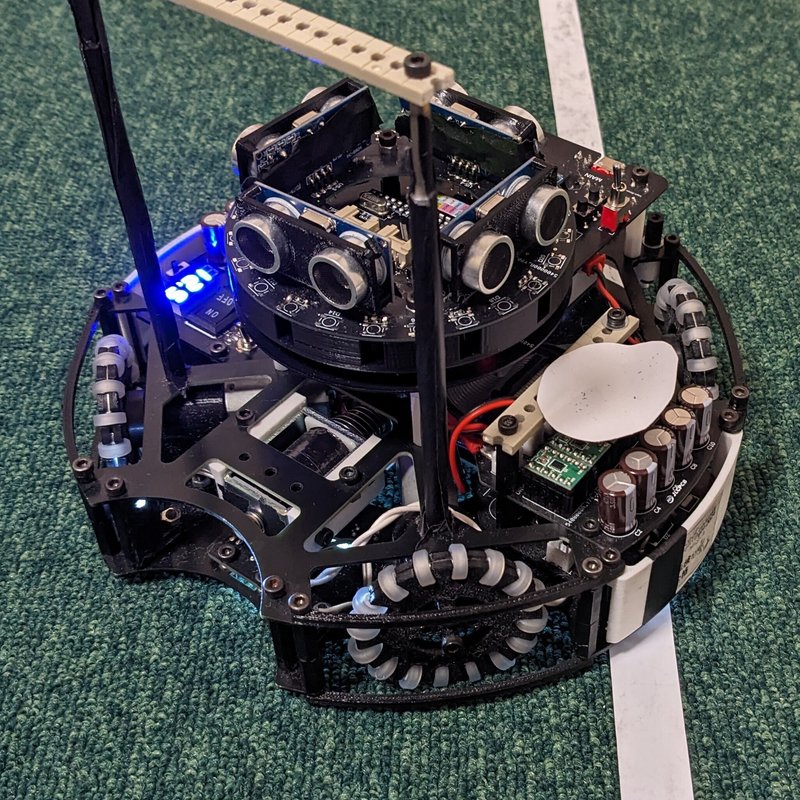
今回はRCJサッカーライトウェイト全国大会で出場した機体の話をしていきます。是非お付き合いください!
構成
主なスペックです。
ぼくがあまり高級思考が無いのであまり高いパーツは使ってません(お金が無いのでそもそも高いパーツを揃えられませんでした)。
マイコン
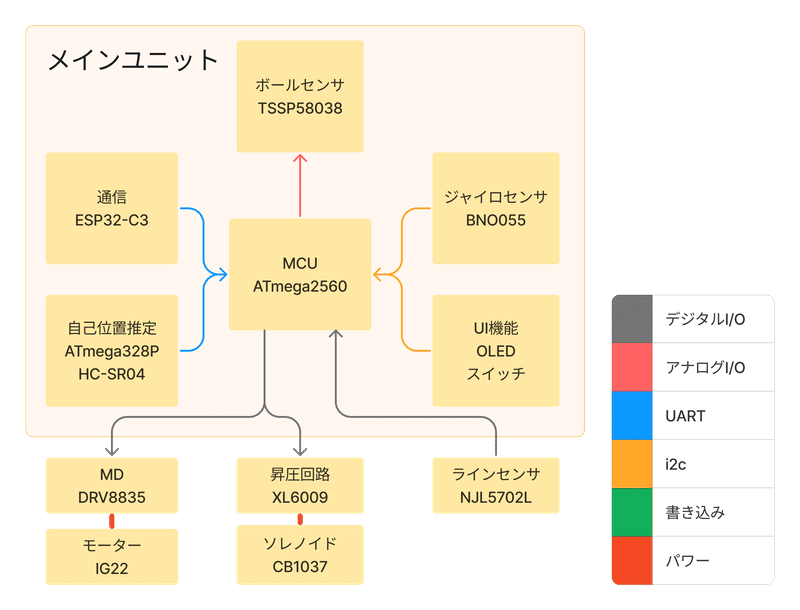
メイン処理はATmega2560(ArduinoMega互換機)、自己位置推定にATmega328p、通信にESP32を使用しました。
設計思想としてはメインのATmega2560に中枢機能を全て任せて、最悪でもATmega2560さえ生きていれば試合ができるようにしました。実際には制作中、大会中に通信の不調等もなく全機能使えていました。またマイコンを1枚の基板に収めることで通信の安定化を図りました。
メインマイコンはほぼ全機能を任せるのでIOピンが多いATmega2560を、自己位置推定用のマイコンはそれほど性能を求めないので手元にあったATmega328pを、通信用マイコンは小さくて情報が豊富なESP32を選びました。
ATmega2560とATmega328pはCH340EでUSBtypeCで書き込めるようにしたのでマイコンへの書き込みはUSBtypeCで共通にしました。

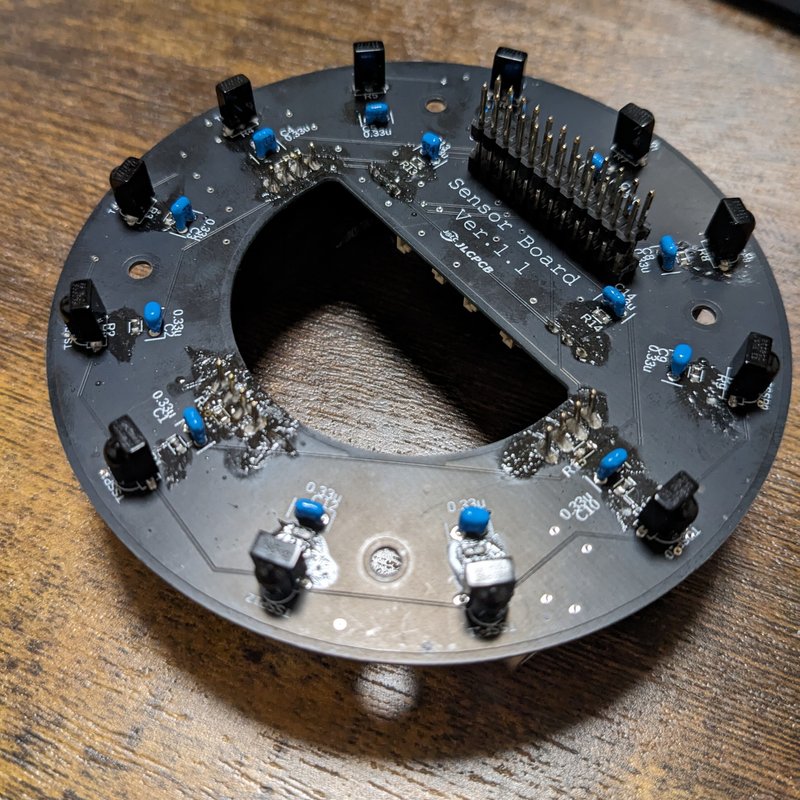
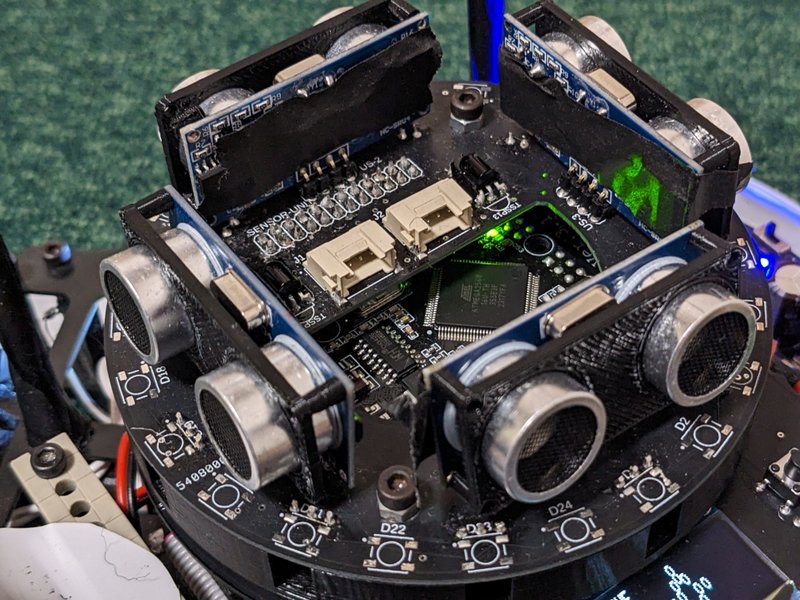
ボールセンサ
TSSP58038の出力をRCフィルタ回路にとおしてアナログ値で読んでいます。
他機体にない点としては、水平方向に12個、上方向に2個つけています。16個つけている機体が多いですが12個でも特に精度は問題なかったです。また上方向にもセンサがあることで審判が取ったボールもなんとなく追えます。
ATmega2560はアナログピンが16個あるので上方向に4個の構成も可能でしたが、当初はSTM32F446を使用する予定だったのでF446に合わせた構成になっています。
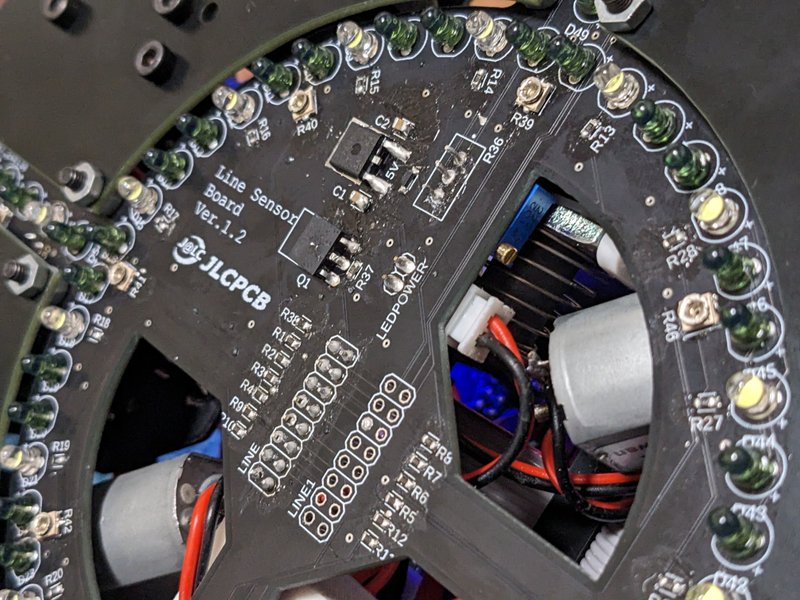
ラインセンサ
エンジェルラインセンサと十字ラインセンサを組み合わせた形状になっています。実際にはほとんどエンジェルラインセンサの方しか使っていませんでした。
ブロック大会機ではアナログ値で読んでいたのですがそれでは遅すぎるという反省から今回はデジタル値で読んでいます。またデジタル値で読むためにセンサ1つ1つに固定抵抗(33kΩ)と可変抵抗(100kΩ)をつけてプルダウン抵抗を調整できるようにしました。またLEDにも固定抵抗(200Ω)と可変抵抗(1kΩ)を付けて輝度の調整もできるようにしています。
LEDの電源をNchMOSFETで切れるようにしています。これは機体を持ち上げた時にLEDを切って他機体のカメラに干渉しないようにするためです。
エンジェルラインセンサの形状がモーターの下に配置せざるを得ないためメンテナンス性はわるいですね。ぴえん

自己位置推定
超音波センサで壁までの距離を測りコートのどこにいるかを判断します。主にキーパーの位置取りに使用しました。
回路や処理は単純ですが、超音波センサの値取得にシンプルに時間がかかるのでメインマイコンではなくATmega328pに処理を任せています。
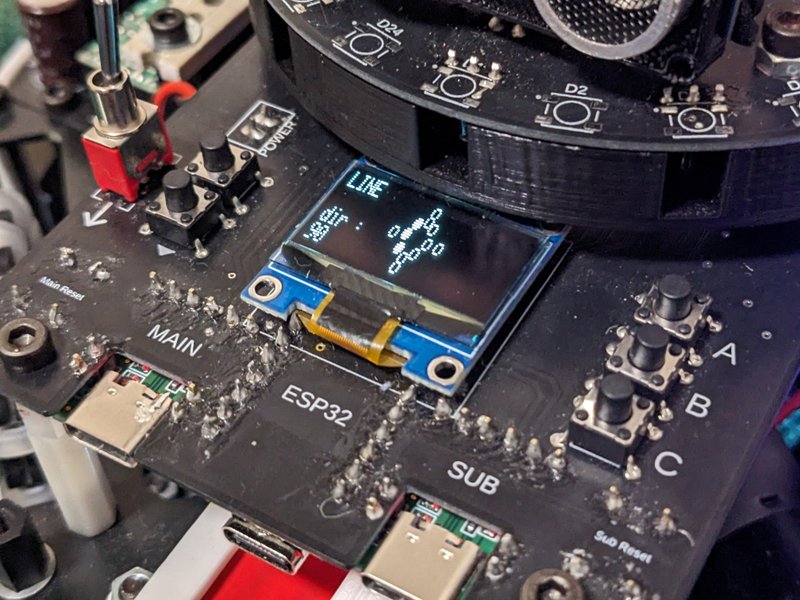
UI
OLEDとタクトスイッチ、トグルスイッチの構成です。OLEDはセンサ値などの可視化、タクトスイッチはUIの操作用、タクトスイッチはサッカーモードとモニタリングモードの切り替えに使いました。
センサ値の確認、キッカーテスト、通信の確認がパソコンなしでできます。
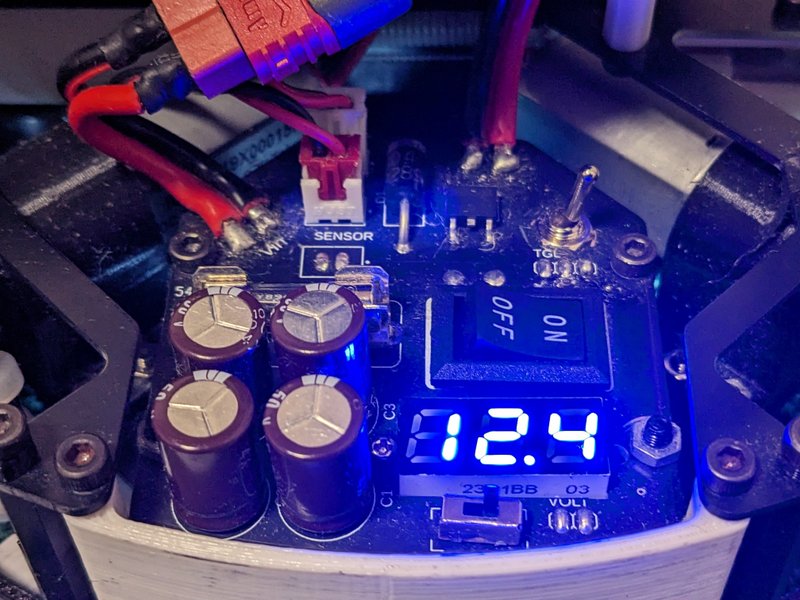
電源
ヒューズ、物理スイッチ、PchMOSFETによるハイサイドスイッチ、電圧計、で主に構成しています。
Lipoバッテリーを扱うので安全には気を使った構成になっています。
ヒューズ、物理スイッチで全電源のオンオフ、ハイサイドスイッチでアクチュエータへの電源のオンオフを切り替えます。
足回り
IG22使用のモータとDRV8835を使用しています。モータがスピード重視でトルク少なめな特性だったのでオムニホイルは小さめに設計しました。またブロック大会機からモータの固定具を改良し、より強力に固定したため出力がしっかり移動する力に使われるようになりました。
定格的には問題ない可もなく不可もなくといった構成ですが、全国大会上位層には全く敵いませんでした。工夫次第では渡り合えるかもしれませんがかなりテクい制御しないといけないので普通に高出力な足回り構成にした方がいいと思います。
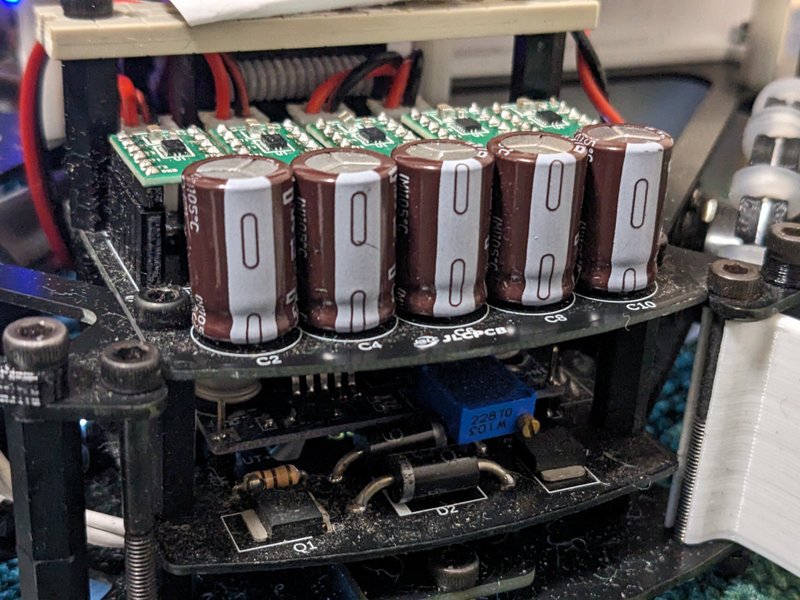
キッカー
バッテリーからの12Vを昇圧回路で30Vまで昇圧してソレノイド(CB1037)に印加します。
キッカーを動作した時のノイズでマイコンの電源が落ちるのはロボカップあるあるなので、念入りに保護回路を作りました。昇圧回路については別記事でも解説します。
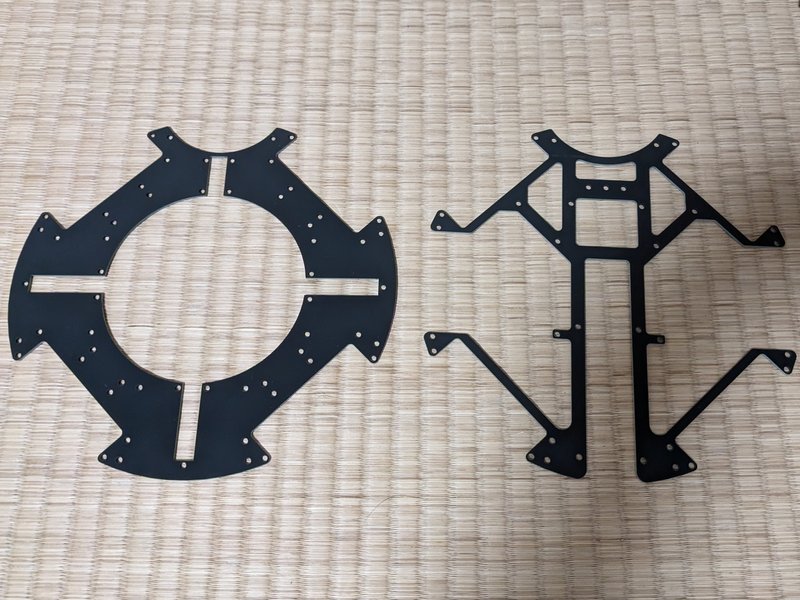
ボディ
回路のないプリント基板を発注しました。発注はJLCPCBさんにお願いしました。
重めな素材なため今までは避けていましたが、薄くても強度があるので重量制限緩和にともない採用しました。手でねじってもびくともしないのでかなりいい強度になっています。
おわりに
今回の基板は全てJLCPCBさんに基板発注をお願いしました。
JLCPCBさんは配布されるクーポンでお得に発注できるのでこちらもぜひ使ってみてください!
大きい基板や細かい配線でも設計通りの基板が届くのでクオリティの高い機体を制作するなら必須だと思います。
多少の妥協はありましたが載せたい機能は大体載せれたいい機体だったと思います。また回路、ハードウェア、ソフトウェア全部自分が手掛けた機体なのでロボカップ人生の中で多分いちばん思い入れがある機体になったと思います。
最後になりましたが、大会運営スタッフの皆さん、交流してくださった選手の皆さんありがとうございました。
この記事が気に入ったらサポートをしてみませんか?