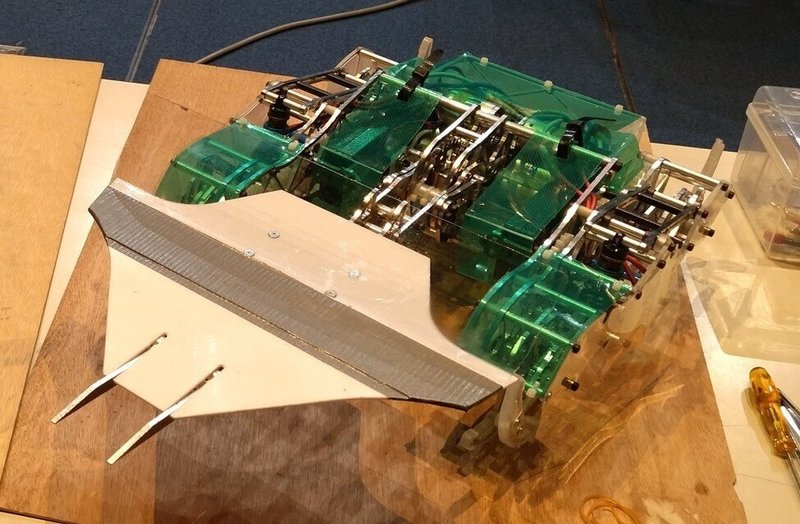
かわロボ用自作アンプについて

わたし、星奈ひかる!宇宙と星座が大好きな中学二年生!
今日もプリキュアになって…描こう!わたしだけのイマジネーション!
本記事の内容
自作アンプの仕様と回路を紹介します。
仕様
本アンプには以下の機能があります。
・FUTABAの受信機から送信される6ch分のPWM信号を読み取り可能
・計3ch分のモータ出力(両脚:2ch、アーム1ch)
・受信機への電源供給(5V)
・アームのサーボ制御
主な仕様は以下の通りです。
・電源電圧:max14.4V ※Li-Fe 4cellの使用を想定
・1chあたりの最大電流:195A
・外形寸法:100×53×17mm(ケーブル含まず)
・重量:多分100gくらい(うろ覚え)
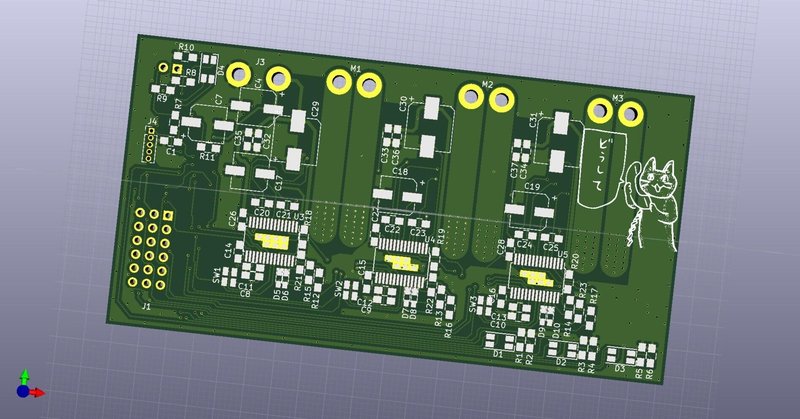
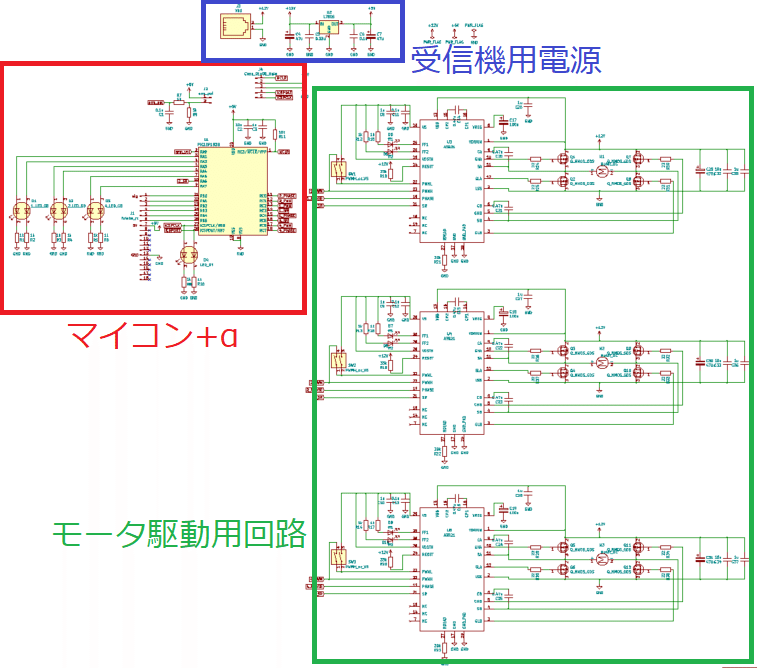
回路紹介
本アンプの回路は大きく分けて3つのグループに分けられます。
①受信機用電源
②マイコン+α
③モータ駆動用回路
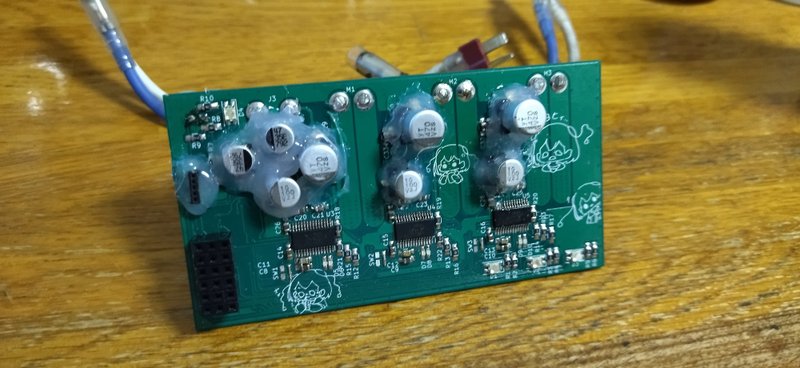
①受信機用電源
バッテリーの電圧(回路図中では12Vと表記)を5Vに降圧し、受信機用の電源とします。
この5Vラインはマイコンの電源としても使用されます。
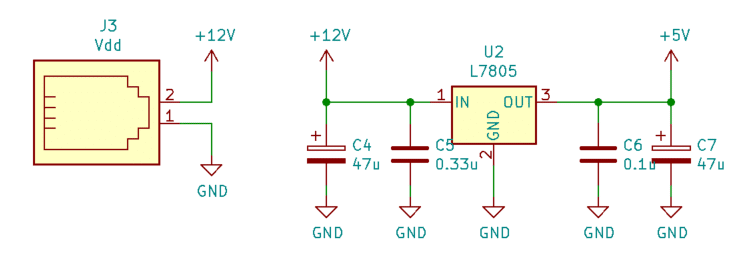
電圧の降下には三端子レギュレータ『MC7805CD2TR4G』を使用しています。
設計当時、何も考えずにでかいパッケージ、でかい出力電流のものを選定しました。
これを専門用語で”ガバ”といいます。
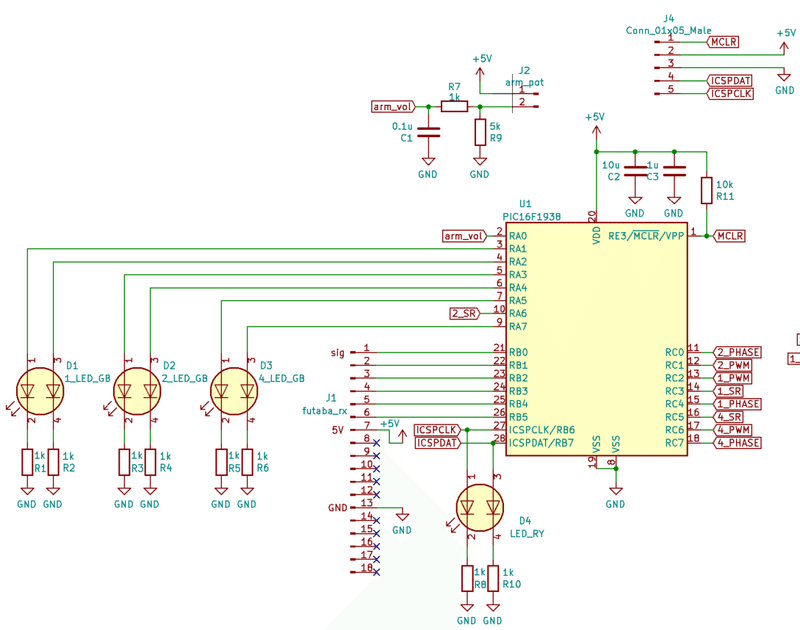
②マイコン+α
本回路におけるマイコンの役割は以下の通りです。
①受信機からのPWM信号×6ch分を読み取る(入力端子:RB0~RB5)
②受信機からのPWM信号に応じてモータの制御量を算出する
・脚はPWM信号のパルス幅に比例した制御量を算出
・アームはPD制御器により制御量を算出
現在角度は外付けのポテンショメータから取得(入力端子:RA0)
③算出された制御量に応じてモータ駆動用回路を制御する信号を出力(出力端子:RA6、RC0~RC7)
あとモータの制御量や動作モードに応じて各LEDの点灯を制御しています。
マイコンは『PIC16F1938』を使用しています。
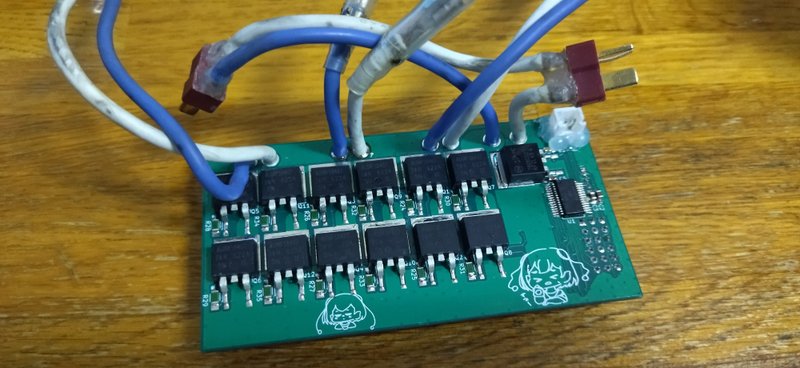
③モータ駆動用回路
マイコンから送られてくる信号に応じてモータを駆動させる回路になります。
モータに電流を流したり流さなかったりする素子(スイッチング素子)とスイッチング素子のON/OFFを制御するゲートドライバICにより構成されています。
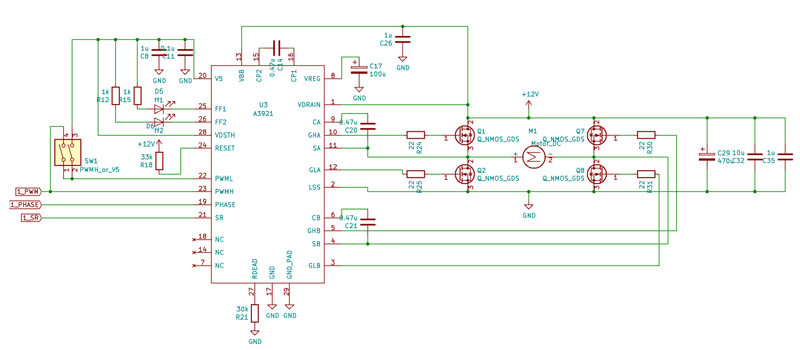
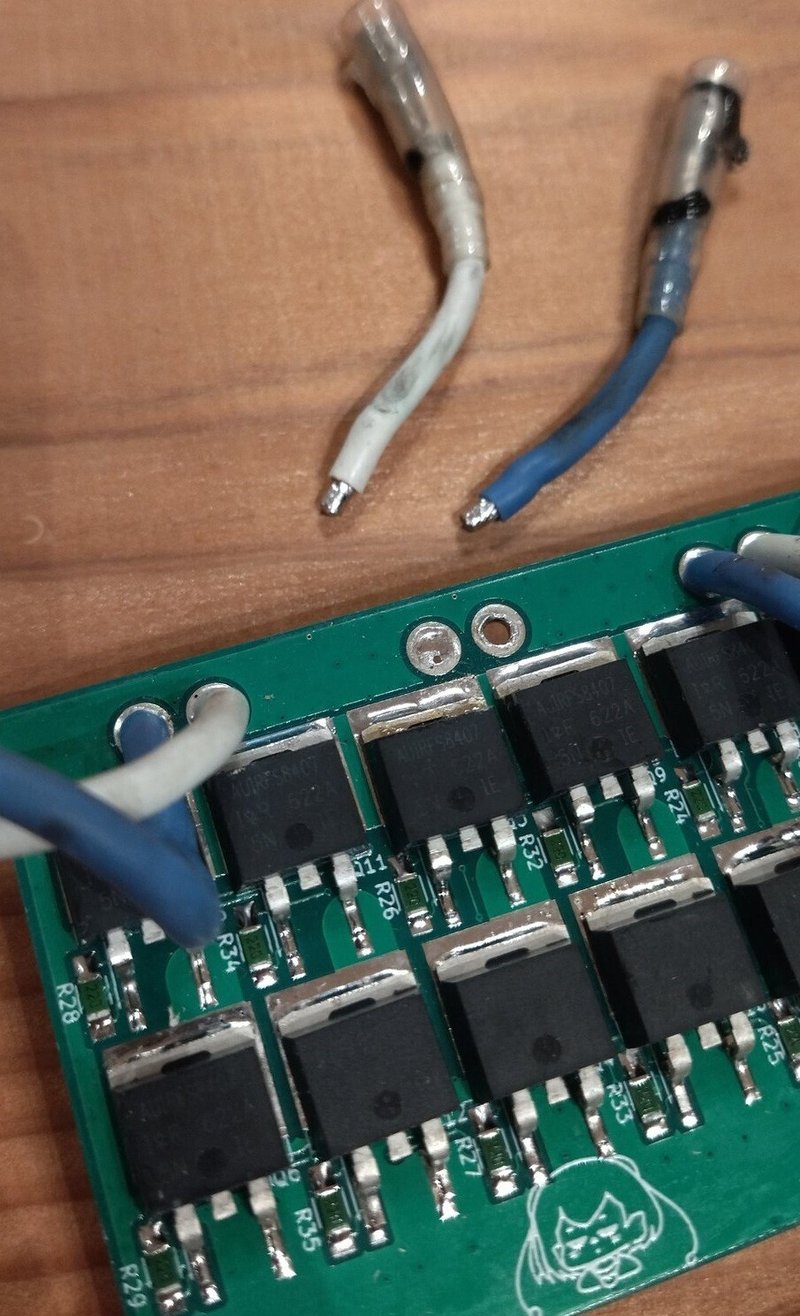
スイッチング素子には『AUIRFS8407』を使用しています。
かなりつよつよな素子でモータ6個のアームを瞬間的にストールさせても壊れませんでした。
※代わりにストール電流の発熱でケーブルのはんだが溶融して外れた。危険なのでちゃんと過負荷時保護機能を入れてください…
ゲートドライバICには『A3921』を使用しています。
フルブリッジゲートドライバでお手軽にブラシ付きDCモータの制御ができる優れもの。
最後に
この自作アンプは学生時代に製作してからかれこれ2年以上使用していますが致命的な故障もなく使い続けています。
何も考えずにクソデカ安全マージンを取った脳筋設計の賜物ですね。
以上、自作アンプの紹介でした。
この記事が気に入ったらサポートをしてみませんか?