ドローン自作日記14

どうも、まなぶぼーどのまなぶです。
今回は自作日記12の続きから、ジャイロセンサー(GY-521_MPU6050から実験するようにしました)と受信機の設置・配線・動作確認を行います。
ジャイロセンサーについては自作日記2にて配線からセンサ単体での動作確認を行っています。
受信機ですが、今回使用する送信機をJumper T16に決めてから探してみました。
どうもJumper T16と相性がよさそうなのはJumper R8みたいですね。
受信機(Jumper R8)のマニュアル。これでとりあえず何となく他メーカーと同様に配線をして動作確認してみました。
センサー・受信機の配線についての解説ページ。これを元に配線を行っていきました。

ジャイロセンサー(GY-521)を用意して、

配線をセンサーモジュールへ配線して、

マイコンの下部に両面テープで機体フレーム金属板と絶縁を確保しつつ固定し、配線をマイコンのピンヘッダへはんだ付けしてセンサー取り付け完了。

次に受信機(Jumper R8)を用意して、

フライトコントローラ用マイコンのArduino UNOの空きスペースに両面テープで固定して、

マニュアルを参照しながら、受信機のVCCピン→マイコンの5Vピン、受信機のGNDピン→マイコンのGNDピン、受信機のCH1-6のPWM信号出力ピン(PWM OUTPUTの黄色のピン)→マイコンのD2,D4~D8にそれぞれ配線します。受信機側はジャンパワイヤのメス端子を差し込み、マイコン側はピンヘッダへはんだ付けしました。
この状態から、ソフトウェアコンフィギュレーションでの動作確認を行う前に、送信機(Jumper T16)と受信機(Jumper R8)のバインドを行います。(必ず事前に送信機の技適マークと技術基準適合証明番号を確認しておきたいですね)
Firmwareの最新版がアップロードされたT16を用意して、
この動画の解説から、初期画面で送信機のディスプレイ左にあるMDLボタンを長押ししてMODEL SETUPメニューに入り、External RFのMode設定をMULTI FrSky D16に変更しておきます。

あとは受信機をバインドボタンを押しながら起動して、送信機側のMODEL SETUPメニューからBindを選択することで数秒後バインドが完了しました。
ここでソフトウェアコンフィギュレーション上でジャイロセンサと送信機・受信機の動作確認を行います。ソフトウェアコンフィギュレーションの接続・設定方法については自作日記2に残しておきました。COMポートを設定してフライトコントローラ用マイコンと通信を開始すると・・・
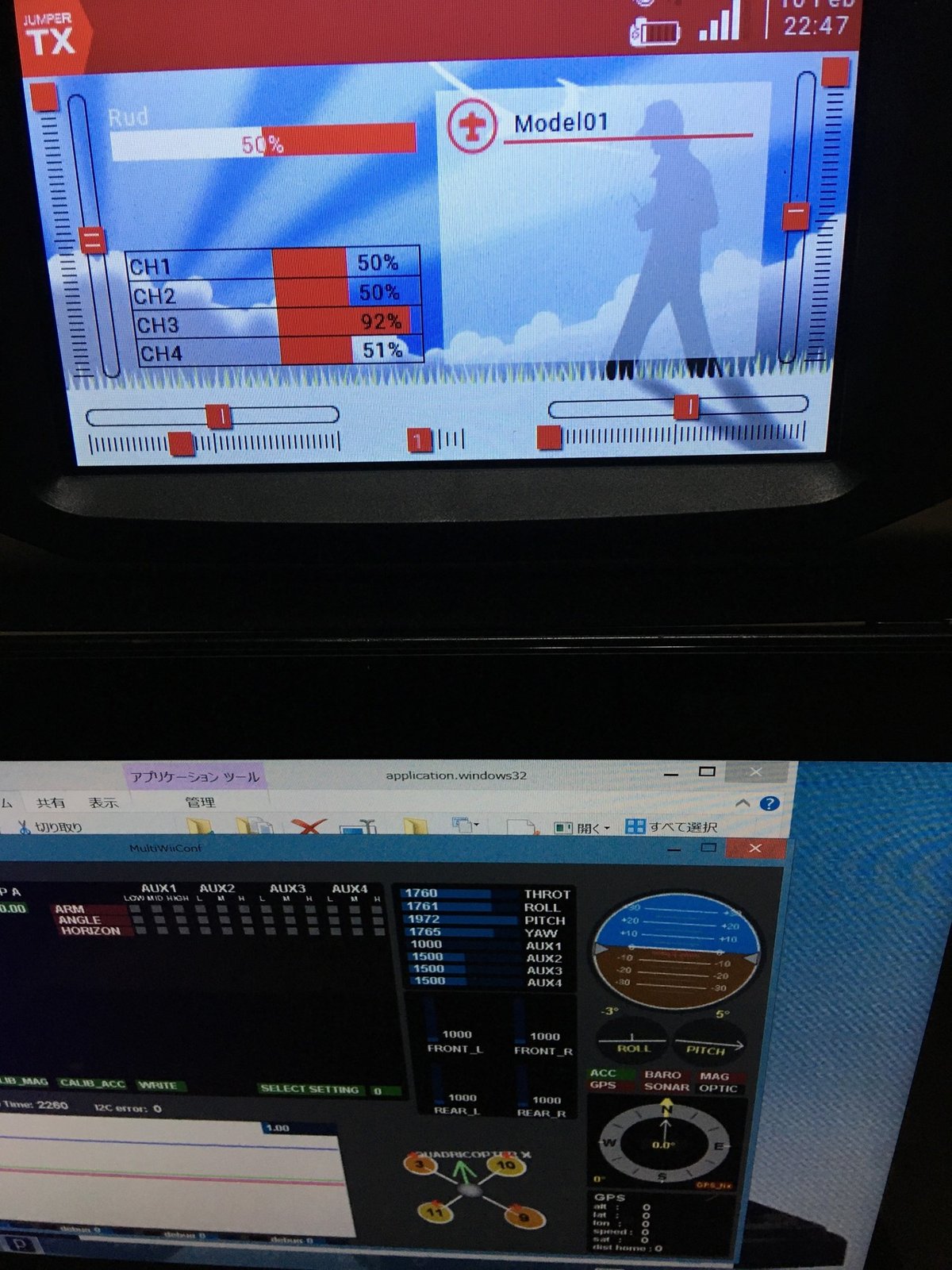
うおぉ、(写真ではわかりづらくてすみませんが)ジャイロセンサも送信機・受信機も正常に動作してる・・・
次回はバッテリーを搭載して、プロペラを取り付けない状態でのモータの制御動作を確認していこうと思います。
今回はここまで。
この記事が気に入ったらサポートをしてみませんか?