ドローン自作日記2

どうも、まなぶぼーどのまなぶです。
今日はジャイロセンサ(MPU6050です L3G4200Dまだとどいてない)とマイコン(Arduino UNO)をブレッドボード上で接続して、センサから加速度値と角速度値を読み出し、演算してArduino IDEのシリアルモニタで確認するとともに、そのままMultiwii(RC模型を制御するための無料オープンソースプロジェクト)のソフトウェアコンフィギュレーション上で動作確認まで行ってみました。
データシートで確認するとせっかくMPU6050が温度まで測定してくれているので、出来合いのプログラムを少し変更して測定した温度も確認しました。ちなみにほんとは通信部分のロジックレベルを合わせなくてはなりませんがとりあえずあわせずに実験してます。
参考にしたサイト。すごくわかりやすい。初期設定部分で温度センサを有効に設定(@0x6B)。
各値がシリアルモニタで見やすいように少し変更して、温度測定値からセンサの温度を演算してモニタに出力するプログラムを追加。
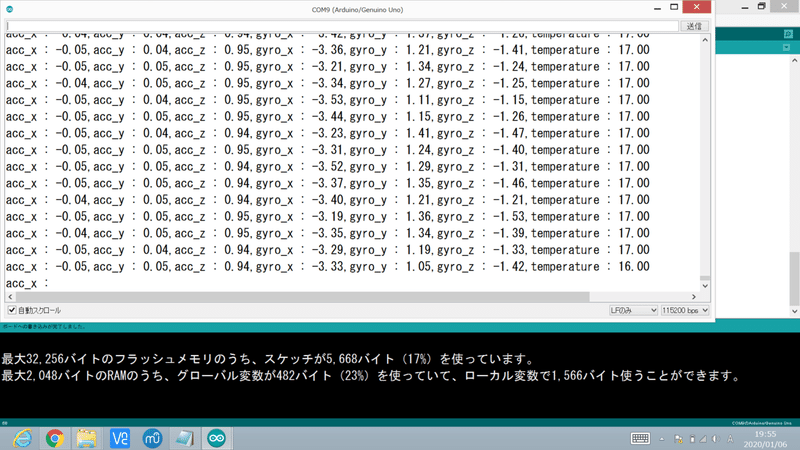
Arduino IDEのシリアルモニタの出力画面。一番右が温度です。
次に、ブレッドボード上で接続した回路はそのままで、Multiwiiのソフトウェアコンフィギュレーション上での動作確認。
参考にしたサイト。受信機やESCは接続せずMPU6050の動作確認のみ。このサイトからダウンロードしたMultiwiiプロジェクトのバージョンは2.3だったけど最新版は2.4かも。
さっそくzipファイルを解凍して、MultiWii.inoを開いて、config.hの
・The type of multicopter ・Motor minthrottle ・Motor maxthrottle ・Mincommand ・I2C speed ・Combind IMU Boards
をそれぞれ確認して、IMUはGY_521(今回使用したMPU6050ブレークボード)を有効化してマイコンボードへ書き込み。
あとはMultiwiiプロジェクト内のソフトウェコンフィグレーションファイルMultiWiiConf.exeを開いて、COMポートを有効化してからジャイロセンサモニタリングスタートすると・・
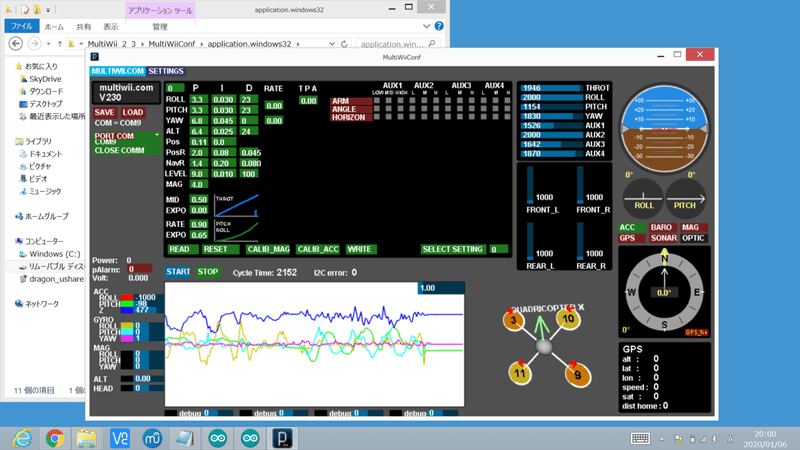
センサ値がグラフ化されて表示されてる・・(画面下側)
ソフトウェコンフィグレーションファイルの内容については詳しく調べるとして、とりあえずジャイロセンサの状態に反応して右上のTHROTTLEやROLLなんかが反応しているのを確認。今回はここまで。
この記事が気に入ったらサポートをしてみませんか?