Studuino:bit ロボットカー 17 (04/17)

「mochizukiのICT活用ワンポイント 7869回」
毎日noteを再開しました。今月のテーマはロボットカーです。
・センサーの位置
アーテックさんのサイトにライントレースカーのサンプルがあったので、それをまず見てみました。
動いている動画も見てみて感じたのは、ラインの中心を本体が外れて走っていたので、なぜかなと考えました。
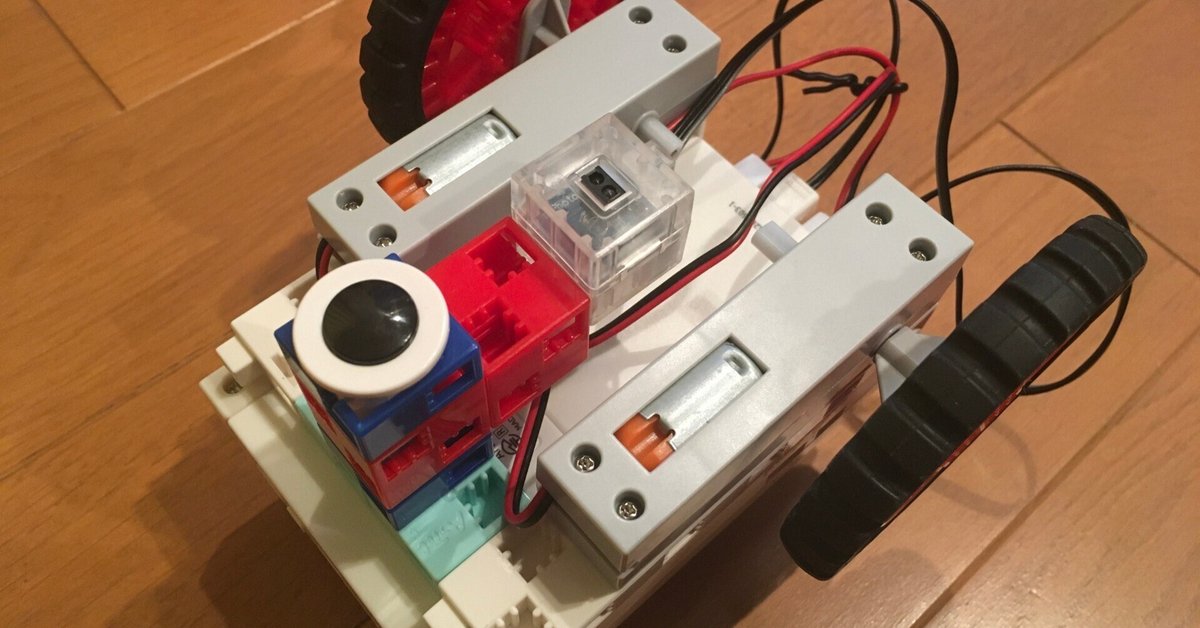
そこでまずセンサーの位置を写真のように変えました。
実際の車では、地面に黒いラインがひかれているわけではないので、この位置(真下)にセンサーがつくことはありません。車のセンサーが見るのは道路の両側にある白線になります。
ロボットカーのライントレースでは、いかに一本の黒のラインを外れないようにするかですから、
・回転(進地回転)の中心である両方のタイヤの真ん中
ここにできるだけ近い位置に取り付けました。
ちょうどロボットカーの中心でもありますね。
これならラインを外れることが少なくなるでしょう。
続きは次回。
この記事が気に入ったらサポートをしてみませんか?