
blenderとMMD◆P2.リギング-S3.リギング(IK)

本記事では、IKなどのボーン設定について記載します。
まずIKとは、Inverse Kinematics(インバースキネマティクス)の略で、逆運動学という意味のようです。この設定をすると、ボーンを動かしてポーズをとらせることが簡単になりますので、こういった人型のモデルにはまず入っています。

まず、足の動きを制御する設定をしていきます。

まず、足首辺りから真後ろにのびるようなボーンを作ります。名前は「足IK.L」「足IK.R」。「接続」のチェックをオフにして、ペアレント(親)は無しにします。

つま先の真下にのびるようなボーンも作ります。名前は「つま先IK.L」「つま先IK.R」。「接続」のチェックをオフにして、ペアレント(親)はさっき作った「足IK.L」「足IK.R」にします。
IKなどもろもろの設定を入れていきます。
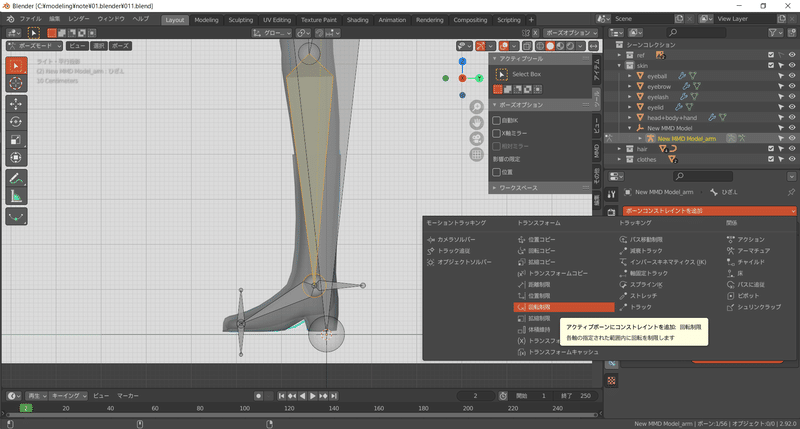
今までは「オブジェクトモード」「編集モード」しか使っていなかったと思うのですが、「ポーズモード」に切り替えます。

ひざのボーンを選択し、「ボーンコンストレイントプロパティ」から「インバースキネマティクス(IK)」を追加します。

設定値は上図のようにします。
続けて、足が変な方向へ曲がらないよう、「回転制限」も追加します。

設定値は上図のようにします。
右側(.R)のボーンも同様にIKと回転制限を追加します。

次に足首のボーンを選択し、「ボーンコンストレイントプロパティ」から「減衰トラック」を追加します。

設定値は上図のようにします。
続けてIKも追加します。

設定値は上図のようにします。
右側(.R)のボーンも同様にIKと減衰トラックを追加します。
次につま先のボーンを選択し、「ボーンコンストレイントプロパティ」から「減衰トラック」を追加します。

上図のように設定します。右側(.R)のボーンも同様に減衰トラックを追加します。

これで足の設定完了です。
ポーズモードで、足IKやつま先IKのボーンを動かしてみると、足全体が動くようになっていると思います。
次は目の動きを制御する設定を入れます。

「目.L」「目.R」ボーンを選択し、「ボーンプロパティ」-「MMD Bone Tools」の「Rotate +」をクリック、「両目」ボーンを選択します。

「目.L」「目.R」ともに設定が終わったら、ポーズモードで両目ボーンを動かしてみてください。「目.L」「目.R」が連動するはずです。
この記事が気に入ったらサポートをしてみませんか?