カムロボにM5Stackを載せる

カムロボにM5Stackを載せ,前回紹介したベース基板と通信することで,M5Stackでカムロボを制御できるようにします.
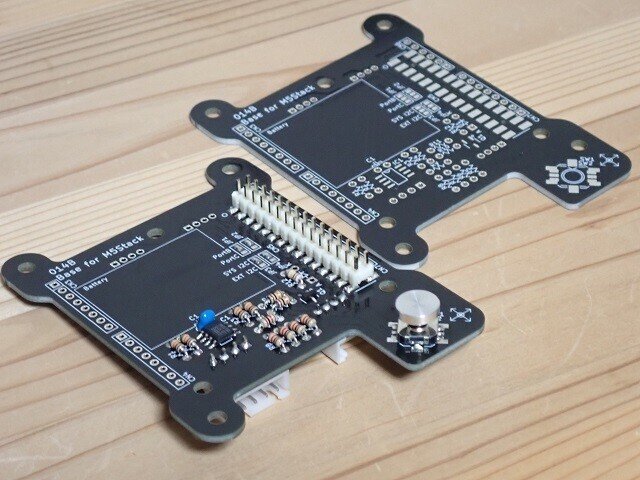
M5Stack Core/Core2をカムロボに載せるための機能をまとめた基板を作りました.
・カムロボの頭の上に固定可能
・I2Cの信号電圧の変換(5V-3.3V)
・Core2用バッテリ搭載スペース
・Grove Port B/Port Cコネクタ
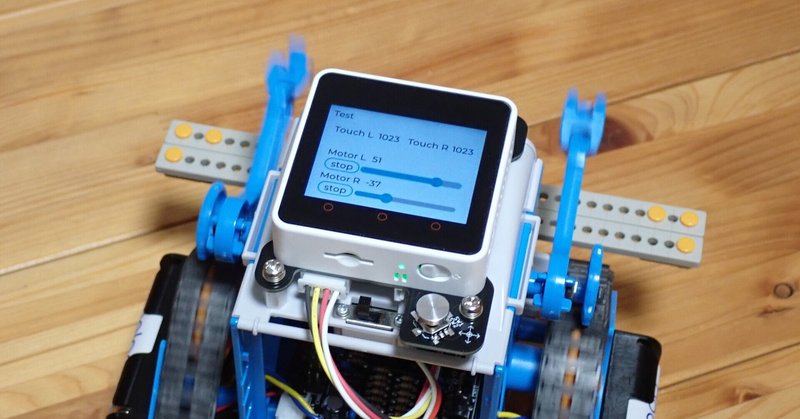
カムロボの頭に搭載
M5StackはLCDディスプレイやタッチパネル/ボタンを備えており,これを使いたいのでカムロボの頭の上に載せます.

I2Cの信号電圧の変換
前回紹介したベース基板ではマイコン(8bit AVR ATmega328)を5V電源で動かしているのでI2Cの信号レベルは5Vになります.以前紹介したとおり,M5StackのI2C信号は3.3Vで繋いだ方が安心ですので,5Vトレラント機能のあるI2CバスリピータIC PCA9515ADを使用しました.
Core2用バッテリ搭載スペース
M5Stack Core(GrayやFireなど)はMBUSやGroveコネクタから5Vを入れれば動くのですが,Core2は併せてバッテリも接続しないと起動しません.そのため,Core2のバッテリを移設・収納できるようスペースを設けました.
Core2は電源OFF時にカムロボの電源スイッチとは別に電源ボタンを操作しないといけないのでそこがちょっと不便ですが….
Grove Port B/Port Cコネクタ
M5Stack Core/Core2にはGrove Port Aコネクタが設けられています.Bottomを付けなくてもPort B/Port Cを使えるようコネクタを設けました.
その他
M5Stack Core/Core2にはボタンやタッチパネルが備えられていますが,Wio Terminalのような5方向スイッチもあるとより便利そうなので,ついでに付けてみました.
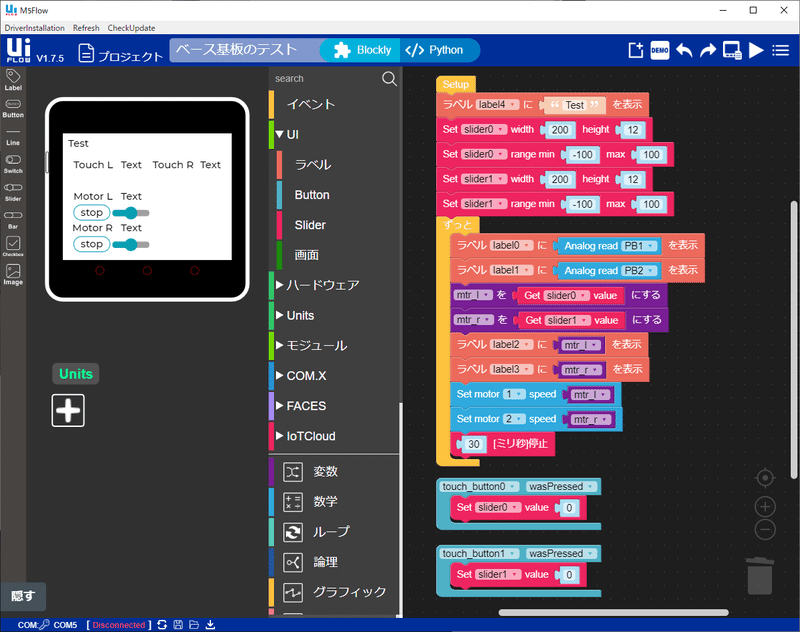
UIFlowでプログラミング
ベース基板はGoPlus2モジュール用の命令を受け付けられるようにしました(一部だけですが).下のように,とりあえずタッチセンサとモータのテスト用プログラムを作ってみました.
まとめ
カムロボにM5Stackを載せてベース基板とI2Cで通信できるようにしました.これで,UIFlowでプログラミングしたりM5Stack各種オプションを組み合わせて使えるようになります.
この記事が気に入ったらサポートをしてみませんか?