
#UE4Study

【第6.5回】武器を持たせる・IKで構えさせる
マウスのチャタリングが酷くても新品を買えずにいる貧乏人が僕です。
今回は武器を持たせて構える動作だけを付けていきます。大した事はやっていないので小数点回としました。
クリスマスシーズンなので歌いながらやっていきたいと思います。
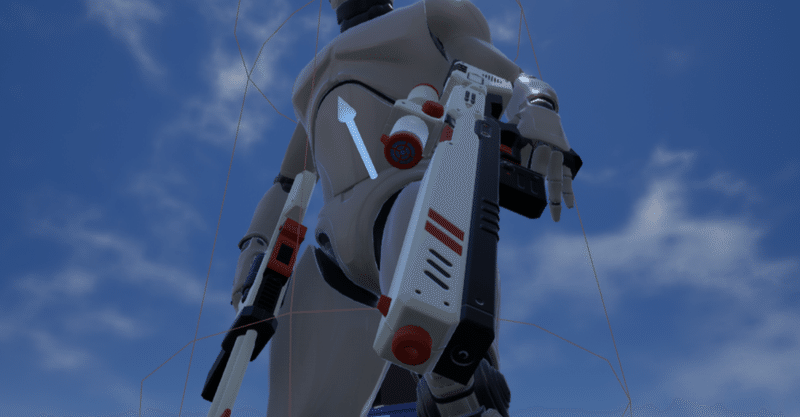
ソケット作~ろ~♪ 手の平に銃を持たせるために〔ソケット〕と呼ばれるものを作ります。
名前で何となく想像できるかと思いますが、スケルタルメッシュ(可動用のボーン=骨が入っ
【第6回】ACV風壁蹴りを実装したけど使わないかも知れない話
久々の更新になってしまいました。
記事内容分はとっくに作成し終わっていたんですが、メカデザイン・3DCGに心を折られて無気力になっておりました。
とりあえずシステム面を強化していこうと気分を切り替えたので、今回は『ARMORED CORE V』系っぽい壁蹴りによる垂直移動を実装します。
「壁蹴り」ってなーに?アーマードコアシリーズでは『4』系統まではブースターを使った自由な垂直上昇、空中制動が可
【第5回】追従カメラのラグ制御・肩越しカメラの動的切り替え+おまけ
4Kモニターを買ったけど結局拡大して使うド近眼、僕です。
随分間が空いてしまいました。メカのデザインに悶々としたり関節機構に悶々としたり色々なことに悶々としていたせいです。
今回は生存報告も兼ねて、追従カメラのラグを制御したり、カメラが自動で左右に切り替わる処理なんかを実装していきます。
(前提)「カメラのラグ」ってなんぞい?第1回で書きましたが、プレイヤーキャラクターに追従するカメラは基本的に
【第4回】滞空能力・ラピッドブースト実装
ロボゲーって基本的にボタンが足りないと思う。僕です。
前回は「ブーストモード」によって地上の挙動を変化させるところまで実装しました。今回はブースト中の滞空能力と、瞬発的な移動を実装します。
ブーストモード中に滞空力を得るもったいぶらずに動作の様子を。
まずは歩行モードでジャンプ。上昇と下降がほぼ同じ速さです。
そしてブーストモードをオンにしてジャンプ。ちょっと分かりにくいですが落下速度が減少

【第3回】歩行モード・ブーストモード実装
ブループリント書くよりnote書く時間の方が長い。僕です。
今回は移動制御まわり、歩行状態とブースト点火状態を実装します。
「歩行モード」と「ブーストモード」について実装したい機能について解説を挟んでおきます。
「歩行モード」とは、その通り脚(あるいは車輪など)で歩く状態です。
速度は出ないものの機体制動がしやすく、入力に対して即応性が高い。
「ブーストモード」はブースターによる加速力を得た

【第2回】データテーブルを使う
メカデザインができないから既に暗礁に乗り上げてる感ある。僕です。
今回はデータテーブルを使って自機のパラメータを一括管理し、それを読み込むブループリントを実装します。
(前提)データテーブルって何だコラ。その名の通りデータを格納しておく表です。
様々な変数を列挙した構造体を用意し、各変数の値をデータテーブルに保存しておくことでパラメータ(今回の場合自機のステータス)の管理を楽にします。
構造体

【第1回】プロジェクト作成・ビハインドビュー実装
今回は手始めとしてビハインドビュー・カメラを実装します。
※追記:2020/09/25
今回の実装法ではキャラクターに旋回などのモーションを加えた際に不都合が出るかも知れません。
(前提)ビハインドビュー・カメラって何よ?ビハインドビューとは後方視点とも言い、自由にカメラを操作できるサードパーソンビュー(三人称視点)と似ていて、明確に定義分けされていませんが、カメラが常にプレイヤーキャラクター