
Besiegeで学ぶ機構学#1の振り返り。

閲覧ありがとうございます、「Besiegeで学ぶ機構学#1、ざっくり機構学概論(Youtube、niconico)」を振り返るnoteです。
導入
導入では、工学の工という字の成り立ちについて触れました。これ、工学系の方ならだいたいどっかで見聞きしたことがあると思うんですが、ちゃんとしたソースがある話なのかは分かりません。
「工 成り立ち」で検索しても、こんな成り立ちは出てきません。でも「工学教育について」とかの論文なんかにはちょくちょく書いてあるんです。
正直、謎です。
機構とは?機構学とは?
機構の定義を「機械の中で様々な部品が連動する仕組み」と説明しました。
では機械とは何でしょうか?日本機械学会では、機械の定義を以下の三つに定めています。
①外力に抵抗してそれ自身を保つことができる部品で構成されている。
②各部品は拘束された相対運動をする。
③外部から供給されたエネルギーを有用な仕事に変換する。
この定義を満たさないものは、器具とか、工具とか、道具とか、構造物とか、まあ機械ではないものとします。
①はまあいいでしょう。液体や気体だけで出来た機械はありません。「部品で構成されている」っていうのも当たり前です。一つにつながって固定された金属塊は金属塊であって機械とは呼べません。
②の「拘束された」というのは大事ですね。「動きを限定された」と言い換えることもできます。ここが、機構学で考えるメインのところです。
③の「有用な仕事に変換する」ってところは、機械だけではなくいろんなモノの定義に入ってきます。「有用」というのは、移動するとか、人間の代わりに鶏に餌をやるとか、まあそういうことです。

ここ、編集的お気に入りポイント。
そのあとちらっと出てきた「メカトロニクス」ですが、これは機械、電気、電子、情報工学をぜーんぶ組み合わせてすげーことしようぜ、っていう学問です。この書き方するとめちゃくちゃ面白そうやな。
機構学だけ学んでも意味ないので、今後こっちのほうにも多少触れていきます。たぶん。
モーターの特性を知らない人がリンク機構を作っても、手で動かして遊ぶ、かわいそうな人になっちゃいますからね。これはこれで楽しいんだけど、さ。
運動伝達について
摩擦車
摩擦車は動画で挙げた例の他に、無段減速機(Continuously Variable Transmission,CVT)なんかにも使われます。歯車と違ってかみ合わないので、滑らかに変速できます。
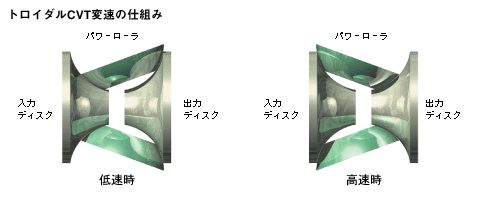
高負荷での運用には向いていませんが、案外高速には強い伝達方法です。
カム
動画で挙げたやつは「卵型カム」と呼ばれる一番基本的なカムです。カムは形状が自由なので、本当にいろんな種類があります。一般的な分類表を下に載せておきます。
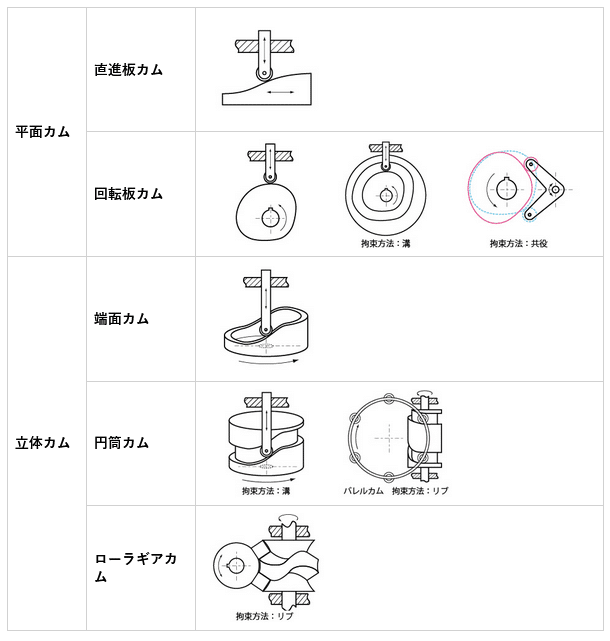
卵型カム等は高速で回すとフォロワの伸縮が間に合わず、動きが変わってしまうことがあります。これに対し、溝カムや共役カムなどは高速で回しても確実にカムの動きをトレースできます。このようなカムを「確動カム」と言います。
エンジンに用いられるカムが軸にくっついてる棒を「カムシャフト」と言います。
あとノック式ボールペンは観察すると面白いので見てみてください。安い透明な単色ボールペンなら大体見えます。SARASAとか(手元にあった)。
カムは紀元前三世紀、アレクサンドリアのヘロンが風力オルガン装置で用いているものが確認されています。おそらくはこれ以前から、脱穀のための機械などにカムが実用化されていたと思われます。
歯車
歯車にもたくさんの種類があり、「これ歯車か…?」みたいなのを含めるとほんとにいっぱいです。それぞれにメリットデメリットがあり、これを解決するためにさらに新しい歯車が生まれ、みたいな。こちらに歯車の種類を紹介したサイトがあるので、良ければ見てみてください。
Besiegeだとどちらかと言えば歯車を組み合わせた機構の方が多いですかね。Besiegeの歯車には精度とかがないので。
ベルトとチェーン
ベルト、チェーンは摩擦車と歯車の関係と似たような感じです。かみ合う履帯とかみ合わない履帯、みたいな。
摩擦車や歯車は入力・出力位置が限定されますが、ベルト・チェーンは動力を遠くに伝えながら、トルクを変えるたりするのが得意です。あとゴミの巻き込みに多少は強いらしい。
連節棒
特にありません。オワコン。
見た目はいい。でも何なら最後の方、蒸気機関車にも使われてなかったし。
Besiegeでもそこまで有用性はありません。ロマン枠。
リンク機構
これは次回以降の動画で触れるのであんまり言及したらネタバレになっちゃう。
カムと組み合わせることで楽しい動作が実現できます。
リンク機構は組み合わせ次第でどんな動きでもできるよ、っていう「ケンペの万能定理」ってやつがあるのですが、リンクが増えれば増えるほど実現性は低くなるので、カムが現実的でしょう。
機構愛好家としては大好きなんですけどね。
締め
今回の動画は「機構学で扱う機構をざっくり紹介する」って感じでした。なんとなーく興味持ってくれるといいなって雰囲気。
新シーズンは楽に、映える見た目を意識して編集してみています。ま、次の動画も一月中に出せるんじゃないかな。
てかこのnote尻すぼみ感あるな。しゃあないか。
なんかあったら追記します。