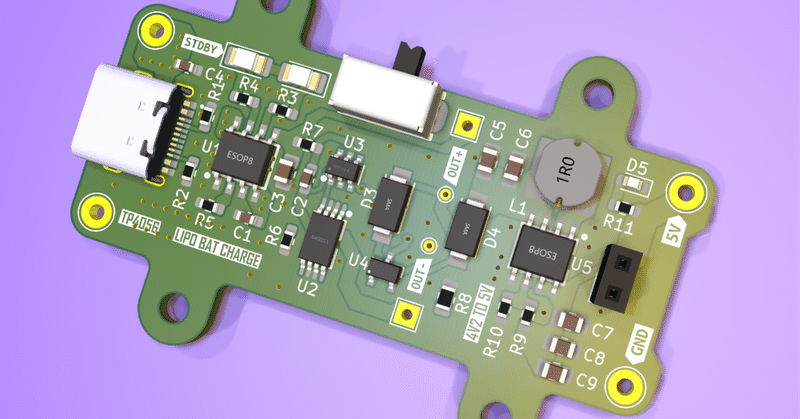
TP4056充電モジュール改良版の話

皆さん!こんにちは!
1月はいかがお過ごしでしょうか?
前回のnoteでは、TP4056を使った充電モジュールの話をしましたが
今日のnoteはそれの続きをします!
タイトルがもう種明かしになっていますが、実は前回のTP4056充電モジュールはちょっとだけ問題があって、それを改良したバージョンを作りました!
今日はその話をしたいと思います!
注意:
noteを購入した場合でも、このnoteの内容による発生するあらゆる事故、怪我などあらゆる損害、損失の責任は一切負いません。このnoteの内容に関して動作の保証は致しません。noteの内容についてすべてが無保証です。読者のご自身の責任で制作、実験をしてください。あくまでも趣味の電子工作のネタの一つとしてご参照程度で購入してお読みになれば幸いです。
それでは始めましょう!
初めに
前回の目的は、まずTP4056充電モジュールの動作を初歩的に理解することです。
また、既存の回路図に基づいて市販しているモジュールをクローンすることです。
同じ回路で同じ部品を揃えたので、基本は問題なく、動作するようになりました。(ちょっとPCBのバグがありましたが)


これがあると、「充電可能リチウムイオンポリマー電池、公称電圧3.7 V、満充電電圧4.2 V」のバッテリなら、どれも使えるはずで、電子工作ではとても便利なモジュールですね。
(本当は今回もちょっとミスった。笑)
問題点
しかし、実は一つ問題がありました。
前回も、お見せした回路図で分かるように、このモジュールだけでは、出力は、バッテリの電圧になります。
Lipoバッテリの電圧は、3.7Vから4.2Vまでなので、実際にほかの回路の電力供給としてはちょっとだけ「中途半端」な電圧ですね。(単純に電球を点灯させるだけとか、モーターをひたすら回すだけならですが)
よくあるマイコンの電力供給としてだと、5Vや3V3が使えるのはありがたいですね。
それを解決するために、今回は、3.7V~4.2Vから5Vへの変換回路を追加しました。そのうえ、受電中だとUSBからの5Vを自動的に選ぶようにする回路も追加しました。
その部分を下の回路を見ながら説明します。
回路図の更新
前回の回路をベースにした、内容を追加していきます。
ここから先は
¥ 100
株式会社虹賢舎 CEO 著書:https://amzn.to/39KwlE4 技術ブログ:https://kokensha.xyz 機械学習 深層学習 Python /JS IoT Raspberry Pi ロボット TOEIC950 https://gosen.world