AI開発の勝利のパターン

名人を倒したプログラム
こんにちはみなさん、これはTuringアドベントカレンダー2023、最終日の記事です。書いている人は山本一成といいます。今は完全自動運転EV量産を目指すTuring株式会社でCEOをやっていますが、以前は名人に勝利したコンピュータ将棋プログラム「Ponanza」というものを2008年から10年ほど開発していました。表題の「AI開発の勝利のパターン」がなにかを説明する前に、少しだけ将棋プログラムの話をさせてください。
当時のコンピュータ将棋の開発状況
コンピュータ将棋において大切なものは評価関数です。評価関数というのは盤面に対してどれくらい良いか悪いを評価する関数です。ここには多くのパラメタが存在しています。そして2008年当時、ほとんどの将棋プログラムの評価関数は手で調整されていました。例えば「王」の横に、守備に適した「金」が配置されていたら+5点みたいな感じでした。
大きな流れに賭ける
そんな中、コンピュータ将棋の評価関数に機械学習を導入する流れが来ており、将棋プログラムを作り始めた私は迷うことなくこの流れに乗ることにしました。というのも手調整で作られた評価関数は数年、時に10年もの年月がかけられたものも存在していました。しかもそれだけの歳月をかけても人間の名人を超えるかは結構不透明な感じでした。
当時の機械学習に関する感情的な反発
コンピュータ将棋の界隈という小さな世界の話なのですが、機械学習に対して複雑な感情を抱いていた開発者が当時は多かったなというのが私の感想です。競合プログラマの作者が「機械学習を使うことは将棋プログラマの誇りに反している。手で作った評価関数が大切だ」みたいな発言をしていたくらいです。
コンピュータ将棋の結末
しかし結局なのですが、将棋プログラムの進化の流れはその後、線形結合ベースの機械学習モデルから、強化学習の導入、全結合NNやCNNベースの評価関数という流れになりました。現在は強力な将棋プログラムを作る上で機械学習を使わないことは事実上選択肢からなくなりました。
実はこのパターン、将棋以外でも
手調整で作られてきたものが、より汎用的で強力なAIに置き換わっていくというのはなにも将棋の世界に限った話ではないです。例えば有名なのはGoogle DeepMindのAlphaGo、深層強化学習によって既存の囲碁プログラムをすべて過去のものに葬り去ったといっても過言ではないでしょう。ボードゲーム領域以外でも、画像認識は深層学習以前は特徴量を人の手で設計していました。こういった技術もCNNの出現以降は古典といってもいいかもしれません。あとは自然言語処理、ChatGPT以前と以後では歴史において断絶といってもいいレベルでしょう。いずれも汎用的な強力なAI技術が従来の技術を大きく抜き去っていく流れでした。
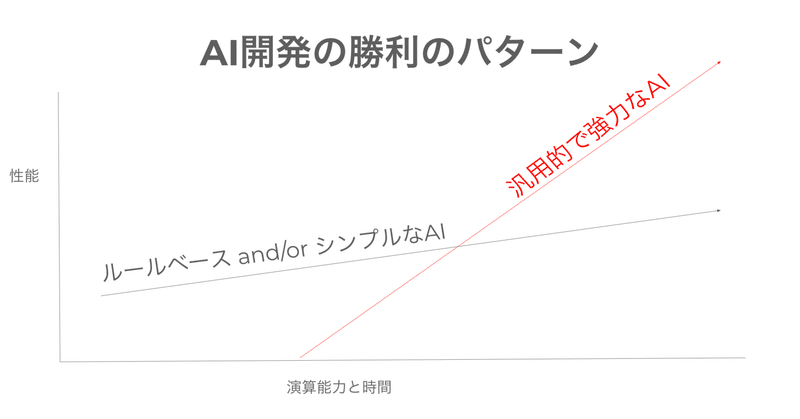
AI開発の勝利のパターン
いままでの流れを総括すると以下になります。ルールベースで書かれたものやシンプルなAIで作られてきたシステムが、汎用的で強力なAIに抜かれていくという流れです。これはAI開発の領域で何度も何度も現れてきたパターンです。
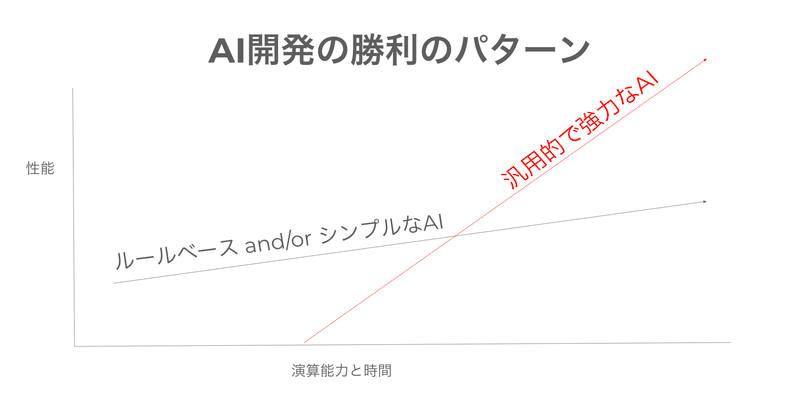
ある日突然、汎用的で強力なAIがゲームチェンジをする。翻って、結局のところルールベースで特定の問題が解決可能なら、すでに解決しているはずです。10万行書いたルールベースのシステムが完全には機能せず、100万行を書いたら完全に機能した事例は、AI領域に限って言えば、個人的には見たことがありません。
Lv4自動運転では完全自動運転には届かない
3年ほど前、自動運転を起業のテーマにしようかと考えてTuring共同創業者の青木さんと色々市場調査をしていました。その時彼から「Lv4自動運転ができたとしても、その技術延長でLv5に行くとは思えない」と言葉が聞こえました。ここでいうLv4自動運転というのは、特定の限定された条件下・エリアにおいて全自動運転が可能という意味で使っています。自動運転技術でカーネギーメロン大学の博士までとった彼が逆に自分の研究方式の限界を表現をするのは強い人だなと思いました。
多くのLv4自動技術を支えるものは自己位置推定+HDMapという現代でも主流の自動運転技術です。しかし私有地の駐車場や込み入った都市部などを考えると、この技術とシンプルな画像認識AIだけでは完全自動運転は難しいと考えています。完全自動運転のとりわけ個人使用の車を考えるなら、HDMapに頼らない手法が必要だと起業当初から感じており、将棋でおきた「AI開発の勝利のパターン」は自動運転領域でも成立すると考えました。
ヒトが運転できるのは、目がいいじゃなくて頭がいいから
その後、完全自動運転EV量産を目指すTuringを青木さんと一緒に起業したのですが、最初から大規模NNによるEnd2Endモデルの開発をDay1からコンセプトにしました。「AI開発の勝利のパターン」が自動運転領域でも起こるだろう、という仮説をたてて会社を起こしたのです。そういえば社名をEnd2Endにちなんで「E2E」にしようとしたら青木さんに反対されました笑 Turingの自動運転のコンセプトは目じゃなくて頭を作ろうです。人よりも路上について理解しているDLモデルを作れば、それは自動運転できるはずです。
大規模NN、LLM、世界モデルが自動運転に来ている
会社の創業から2年という時間が流れ、今完全にその流れが来ていると我々は感じています。LLMという途方もない革命もこの流れを加速させています。アカデミアの世界でも大規模NNを利用したEnd2Endモデルの自動運転領域での活用は大変増えています。Turingは「AI開発の勝利のパターン」に則って、完全自動運転を実現しようと考えています。Turingの実際のAI開発の道筋は、Turingのリサーチ部門の山口さんの記事の記事もぜひ参考に。
最後にちょっとだけTuringの宣伝
Turingは完全自動運転だけではなくEVの量産を掲げているスタートアップです。スタートアップがAIだけでなくクルマも作ってしまおう!というのは大きな話に聞こえますが、世界を見渡せばこの領域でのスタートアップは何百社とあります。さらに日本は非常にクルマを作ることが得意という点、そしてテスラというEVスタートアップが創業から20年で現在のように途方もなく大きくなったことを考えると、我々にもそういったことは可能なはずです。完全自動運転EV量産という未来の当たり前を作るためにTuringをやっています。あなたのチカラを待っています。
この記事が気に入ったらサポートをしてみませんか?