
地球表面の座標系での運転方程式

回転する座標系には、遠心力とコリオリの力が働く。地球は自転しており、しかも実際の地球は球ではなく回転楕円体である。
この運動方程式の導出はわたしには非常にややこしく難しかった。
忘れないために記録を残す。
全体像と方針

方針として、慣性座標系OoXoYoZo を角速度ωで自転する回転座標系Oxyz(地球)に変換し、地心緯度(地球を球とした時の移動)λo回転したO’x’y’z’系に変換、さらに地表に向かって地球半径R平行移動したO”x”y”z”系に変換し、最後に回転楕円体(実際の地球の形)の表面に原点を持つ地理的緯度λの座標系O’’’x’’’y’’’z’’’系に変換する。
1.Oxy系の運動方程式



第3項:遠心力は、原点から遠ざかる方向
2.O’x’y’z’系への変換
Oxyz系を(π/2-λo)だけ回転させる。


3.O”x”y”z”系への変換
z’,z”方向への平行移動、移動距離はR(地球の半径)である。

ここで、値の著しく小さい項を0とする。
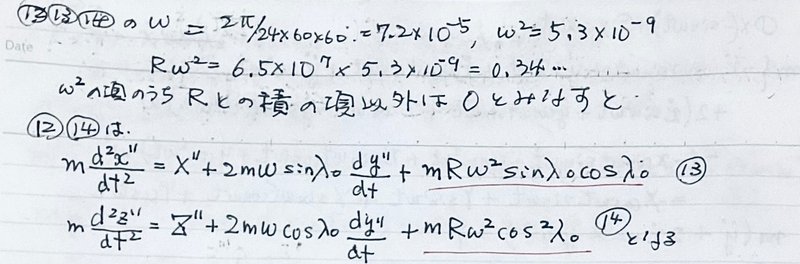
ω^2 を掛けた項の大きさの比較

さらに、mRω^2の入った項を置き換える。

4.O’’’x’’’y’’’z’’’系への変換
回転楕円体上での座標系に変換する。球体上の座標系からδ 回転する。


このあとmgo sinδ、mgo cosδ について考える。

最後に
回転の行列、逆行列を駆使して各座標、各力を変換する技、2つの式にそれぞれsin,cos を掛けて足し合わせてd2x/dt2 を出す技が何度も出てくる。
3で行った著しく小さい頃を0とする小細工、mg、mgo の導入など、どのタイミングでするかの判断は結構悩ましかった。
わたしにはかなりきつかったが、試行錯誤して少しは賢くなったということにしておこう。
この記事が気に入ったらサポートをしてみませんか?