2次曲線、主軸変換

連成振動を原島鮮「力学Ⅱ」に従って進めていたら、主軸変換という言葉が出てきた。なんのこっちゃウーロン茶である。主軸変換でググると行列の対角化がまた出てきた。さらに2次曲線。。 もう下流に戻れないのではと不安になりながら遡っていった。
1 2次曲線の確認
円、楕円、双曲線、放物線のことを2次曲線といい、
$${ax^2+bxy+cy^2+dx+ey+f=0}$$(1)の形で表現され、
$${b^2-4ac<0}$$のとき 楕円
$${b^2-4ac>0}$$のとき 双曲線
$${b^2-4ac=0}$$のとき 放物線 である。
1-1 放物線
定点(焦点$${\text{F}(p,0)}$$)と定直線(準線$${x=-p}$$)からの距離が等しい
点$${\text{P}(x, y)}$$の軌跡である。($${p\neq0}$$)
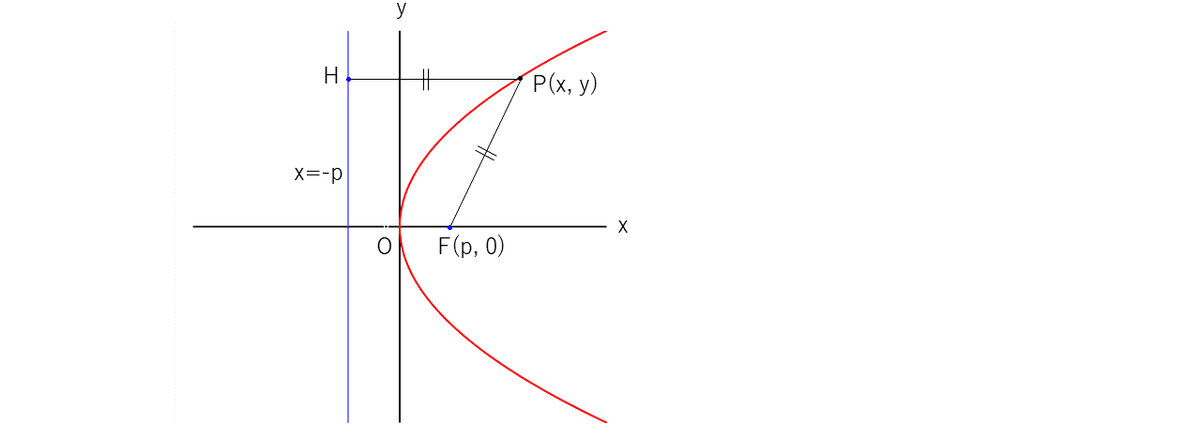
$${\overline{\text{PF}}=\overline{\text{PH}}}$$より $${\sqrt{(x-p)^2+y^2}=|x-(-p)|}$$
2乗して $${(x-p)^2+y^2=(x+p)^2}$$
$${x^2-2px+p^2+y^2=x^2+2px+p^2}$$
よって $${y^2=4px}$$ (2)(放物線の標準形)
または$${x}$$、$${y}$$を入れ替えて $${x^2=4py}$$ (3)(放物線の標準形2)
(2)は(1)において$${a=b=0}$$、(3)は$${b=c=0}$$なので
$${b^2-4ac=0}$$である。
1-2 楕円
2定点(焦点$${\text{F}(c,0), \text{F'}(-c,0)}$$)からの距離の和($${2a}$$とする)が等しい
点$${\text{P}(x, y)}$$の軌跡である。($${c\neq0, a>c>0}$$)
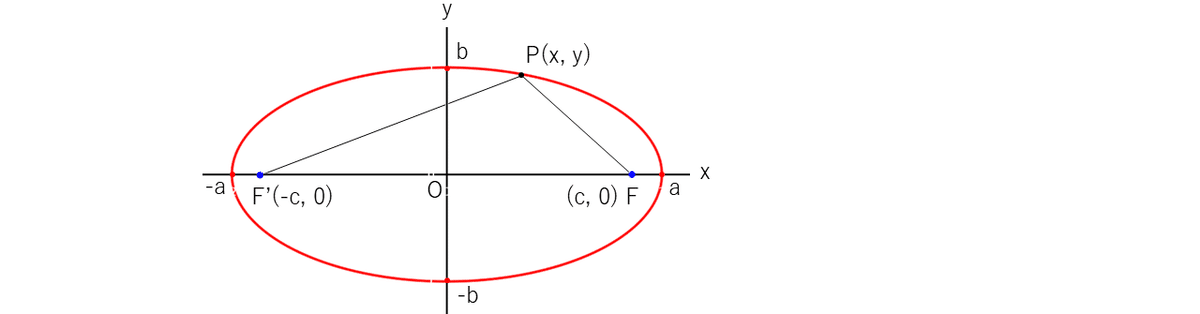
$${\overline{\text{PF}}+\overline{\text{PF'}}=2a}$$より $${\sqrt{(x-c)^2+y^2}+\sqrt{(x+c)^2+y^2}=2a}$$
$${\sqrt{(x-c)^2+y^2}=2a-\sqrt{(x+c)^2+y^2}}$$
2乗して
$${(x-c)^2+y^2=4a^2-4a\sqrt{(x+c)^2+y^2}+(x+c)^2+y^2}$$
$${x^2-2cx+c^2+y^2=4a^2-4a\sqrt{(x+c)^2+y^2}+x^2+2cx+c^2+y^2}$$
$${-2cx=4a^2-4a\sqrt{(x+c)^2+y^2}+2cx}$$
$${4a\sqrt{(x+c)^2+y^2}=4a^2+4cx}$$
$${a\sqrt{(x+c)^2+y^2}=a^2+cx}$$
2乗して
$${a^2x^2+2a^2cx+a^2c^2+a^2y^2=a^4+2a^2cx+c^2x^2}$$
$${a^2x^2+a^2c^2+a^2y^2=a^4+c^2x^2}$$ $${(a^2-c^2)x^2+a^2y^2=a^2(a^2-c^2)}$$
$${\dfrac{x^2}{a^2}+\dfrac{y^2}{a^2-c^2}=1}$$
$${a^2-c^2=b^2}$$とおくと $${\dfrac{x^2}{a^2}+\dfrac{y^2}{b^2}=1}$$(4)(楕円の標準形)
(1)において $${a=\dfrac{1}{a'^2}, b=0, c=\dfrac{1}{b'^2}}$$なので
$${b^2-4ac=0-4×\dfrac{1}{a'^2}×\dfrac{1}{b'^2}<0}$$である。
1-3 双曲線
2定点(焦点$${\text{F}(c,0), \text{F'}(-c,0)}$$)からの距離の差($${2a}$$とする)が等しい
点$${\text{P}(x, y)}$$の軌跡である。($${c\neq0, a>c>0}$$)
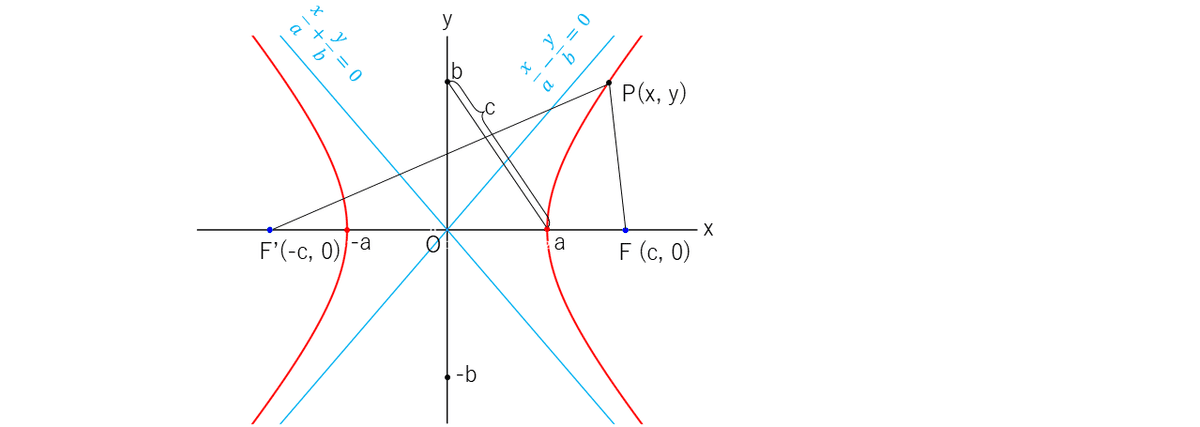
$${\overline{\text{PF}}-\overline{\text{PF'}}=\pm2a}$$より $${\sqrt{(x-c)^2+y^2}-\sqrt{(x+c)^2+y^2}=\pm2a}$$
$${\sqrt{(x-c)^2+y^2}=\pm2a+\sqrt{(x+c)^2+y^2}}$$
2乗して
$${(x-c)^2+y^2=4a^2\pm4a\sqrt{(x+c)^2+y^2}+(x+c)^2+y^2}$$
$${x^2-2cx+c^2+y^2=4a^2\pm4a\sqrt{(x+c)^2+y^2}+x^2+2cx+c^2+y^2}$$
$${\mp4a\sqrt{(x+c)^2+y^2}=4a^2+4cx}$$ $${\mp a\sqrt{(x+c)^2+y^2}=a^2+cx}$$
2乗して
$${a^2x^2+2a^2cx^2+a^2c^2+a^2y^2=a^4+2a^2cx+c^2x^2}$$
$${(a^2-c^2)x^2+a^2y^2=a^2(a^2-c^2)}$$
$${\dfrac{x^2}{a^2}+\dfrac{y^2}{a^2-c^2}=1}$$ $${\dfrac{x^2}{a^2}-\dfrac{y^2}{c^2-a^2}=1}$$
$${c^2-a^2=b^2}$$とおくと $${\dfrac{x^2}{a^2}-\dfrac{y^2}{b^2}=1}$$(5)(双曲線の標準形)
漸近線は $${\dfrac{x}{a}\pm\dfrac{y}{b}=0}$$である。
(1)において $${a=\dfrac{1}{a'^2}, b=0, c=-\dfrac{1}{b'^2}}$$なので
$${b^2-4ac=0-4×\dfrac{1}{a'^2}×\Big(-\dfrac{1}{b'^2}\Big)>0}$$である。
他にも平行移動、離心率、媒介変数表示などいくつか要があるが、ここで必要な前提ではない。以上ザクっと復習した。
2 主軸変換
2次曲線の一般形を以下のように変形する。(のちの変形の都合で$${b}$$は$${2b}$$とする。
$${ax^2+2bxy+cy^2+dx+ey+f=0}$$(1)(2次曲線の一般形)
$${ax^2+bxy+bxy+cy^2+dx+ey+f=0}$$
$${(ax+by)x+(bx+cy)y+dx+ey+f=0}$$
$${\begin{bmatrix}ax+by bx+cy\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}+\begin{bmatrix}d e\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}+f=0}$$
$${\begin{bmatrix}x y\end{bmatrix}\begin{bmatrix}a b\\b c\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}+\begin{bmatrix}d e\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}+f=0}$$ (6)
ここで$${\bm{A}=\begin{bmatrix}a b\\b c\end{bmatrix}}$$とする。
$${\bm{A}}$$に対する固有値:$${\lambda_1, \lambda_2}$$
固有ベクトル:$${\bm{x_1}, \bm{x_2}}$$(直交している)
規格化された固有ベクトル:$${\bm{u_1}, \bm{u_2}}$$( 〃 )
対角化ベクトル:$${\bm{P}=\begin{bmatrix}\bm{u_1} \bm{u_1}\end{bmatrix}}$$(規格化されている)
$${\bm{P}}$$の逆ベクトル:$${\bm{P}^{-1}}$$
$${\bm{P}}$$の転置ベクトル:$${{^t\bm{P}}}$$($${{^t\bm{P}}=\bm{P}^{-1}}$$である)
とする。
以上より
$${\begin{bmatrix}x\\y\end{bmatrix}=\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}}$$(7)、また$${\begin{bmatrix}x'\\y'\end{bmatrix}={^t\bm{P}}\begin{bmatrix}x\\y\end{bmatrix}}$$(8)、$${^t\bm{P}\bm{A}\bm{P}=\begin{bmatrix}\lambda_1 0\\0 \lambda_2\end{bmatrix}}$$(9)
では、変形をはじめる
$${\begin{bmatrix}x y\end{bmatrix}\begin{bmatrix}a b\\b c\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}+\begin{bmatrix}d e\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}+f=0}$$ (6)
$${\begin{matrix}\\ \end{matrix}^t\begin{bmatrix}x\\ y\end{bmatrix}\bm{A}\begin{bmatrix}x\\y\end{bmatrix}+\begin{bmatrix}d e\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}+f=0}$$
(7)を代入
$${\begin{matrix}\\ \end{matrix}^t\bigg\{\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}\bigg\}\bm{A}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+\begin{bmatrix}d e\end{bmatrix}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+f=0}$$
$${\begin{matrix}\\ \end{matrix}^t\begin{bmatrix}x'\\y'\end{bmatrix}{^t\bm{P}}\bm{A}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+\begin{bmatrix}d e\end{bmatrix}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+f=0}$$
(9)を代入
$${\begin{bmatrix}x' y'\end{bmatrix}\begin{bmatrix}\lambda_1 0\\0 \lambda_2\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+\begin{bmatrix}d e\end{bmatrix}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+f=0}$$
$${\begin{bmatrix}\lambda_1x' \lambda_2y'\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+\begin{bmatrix}d e\end{bmatrix}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+f=0}$$
$${\begin{bmatrix}d e\end{bmatrix}\bm{P}=\begin{bmatrix}d' e'\end{bmatrix}}$$とする
$${\begin{bmatrix}\lambda_1x' \lambda_2y'\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+\begin{bmatrix}d' e'\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+f=0}$$
$${\lambda_1x'^2+\lambda_2y'^2+d'x'+e'y'+f=0}$$ (11)($${x'y'}$$の項が無くなった!)
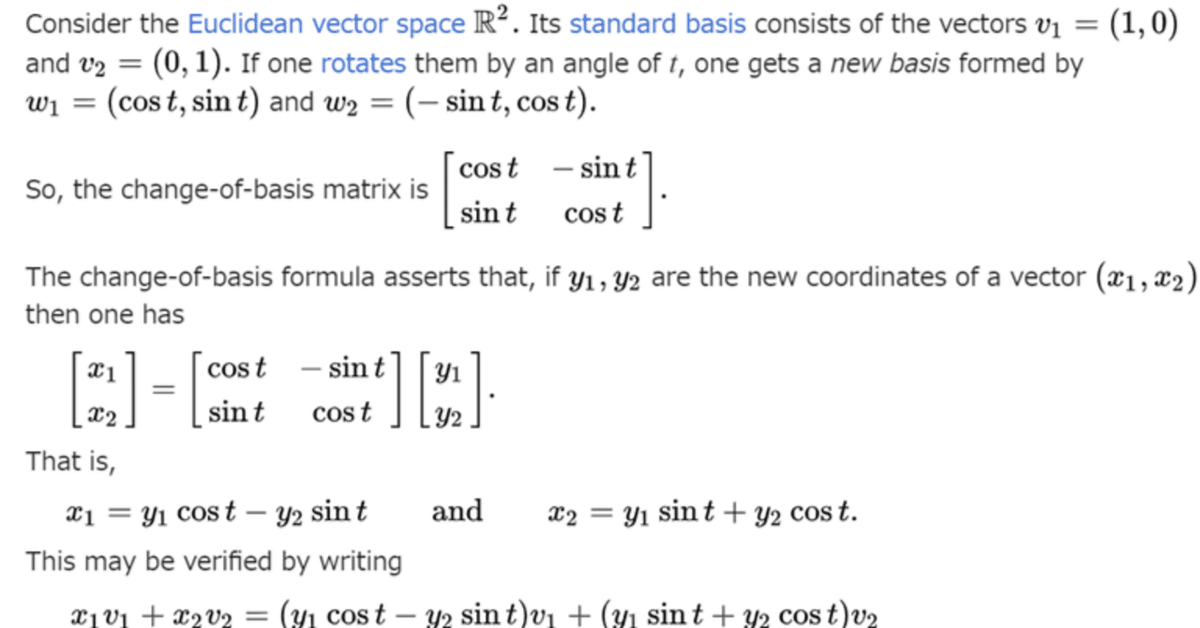
ここで座標系$${\text{Oxy}}$$と座標系$${\text{Ox'y'}}$$の関係を考える。
座標系$${\text{Ox'y'}}$$は座標系$${\text{Oxy}}$$を原点中心に半時計まわりに$${\theta}$$回転したものすると
$${\begin{bmatrix}x'\\y'\end{bmatrix}=\begin{bmatrix}\cos\theta \sin\theta\\-\sin\theta \cos\theta\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}}$$
よって
$${\begin{bmatrix}x\\y\end{bmatrix}=\begin{bmatrix}\cos\theta \sin\theta\\-\sin\theta \cos\theta\end{bmatrix}^{-1}\begin{bmatrix}x'\\y'\end{bmatrix}=\begin{bmatrix}\cos\theta -\sin\theta\\\sin\theta \cos\theta\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}}$$
$${=\begin{bmatrix}x'\cos\theta-y'\sin\theta\\x'\sin\theta+y' \cos\theta\end{bmatrix}}$$(12)
(7)と比べると
$${\bm{P}=\begin{bmatrix}\cos\theta -\sin\theta\\\sin\theta \cos\theta\end{bmatrix}}$$(13)である。
(1)に(12)を代入する
$${ax^2+bxy+cy^2+dx+ey+f=0}$$(1)
$${a(x'\cos\theta-y'\sin\theta)^2+b(x'\cos\theta-y'\sin\theta)(x'\sin\theta+y' \cos\theta)}$$
$${+c(x'\sin\theta+y' \cos\theta)^2+d(x'\cos\theta-y'\sin\theta)}$$
$${+e(x'\sin\theta+y' \cos\theta)+f=0}$$
$${ax'^2\cos^2\theta-2ax'y'\sin\theta\cos\theta+ay'^2\sin^2\theta+bx'^2\sin\theta\cos\theta}$$
$${+(b\cos^2\theta-b\sin^2\theta)x'y'-by'^2\sin\theta\cos\theta+cx'^2\sin^2\theta}$$
$${+2cx'y'\sin\theta\cos\theta+cy'^2\cos^2\theta+dx'\cos\theta-dy'\sin\theta}$$
$${+ex'\sin\theta+ey' \cos\theta+f=0}$$
$${(a\cos^2\theta+b\sin\theta\cos\theta+c\sin^2\theta)x'^2}$$
$${+\{2(c-a)\sin\theta\cos\theta+b(\cos^2\theta-\sin^2\theta)\}x'y'}$$
$${+(a\sin^2\theta-b\sin\theta\cos\theta+c\cos^2\theta)y'^2+(d\cos\theta+e\sin\theta)x'}$$
$${+(-d\sin\theta+e\cos\theta)y'+f=0}$$
(11)は$${x'y'}$$の係数=0なので
$${2(c-a)\sin\theta\cos\theta+b(\cos^2\theta-\sin^2\theta)=0}$$
$${2(c-a)\dfrac{1}{2}\sin(\theta+\theta)+b\cos(\theta+\theta)=0}$$
$${(c-a)\sin2\theta+b\cos2\theta=0}$$ (14)
$${\dfrac{\sin2\theta}{\cos2\theta}=\tan2\theta=\dfrac{b}{a-c}}$$ $${\theta=\dfrac{1}{2}\tan^{-1}\Big(\dfrac{b}{a-c}\Big)}$$ (15)
(i) $${a=c}$$のとき (14)より$${b\cos2\theta=0}$$ $${2\theta=\pm\dfrac{\pi}{2}}$$ $${\theta=\pm\dfrac{\pi}{4}}$$
(ii) $${a\neq c}$$のとき (15)より$${\theta=\dfrac{1}{2}\tan^{-1}\Big(\dfrac{b}{a-c}\Big)}$$
以上をまとめると
座標系Oxy $${ax^2+bxy+cy^2+dx+ey+f=0}$$(1)
↓ 半時計方向に$${\theta}$$回転
↓ $${\begin{bmatrix}x'\\y'\end{bmatrix}=\begin{bmatrix} \cos\theta \sin\theta\\-\sin\theta \cos\theta\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}=\bm{P}^{-1}\begin{bmatrix}x\\y\end{bmatrix}}$$
座標系Ox'y' $${\lambda_1x'^2+\lambda_2y'^2+d'x'+e'y'+f=0}$$(11)
3 具体例
3-1 その1
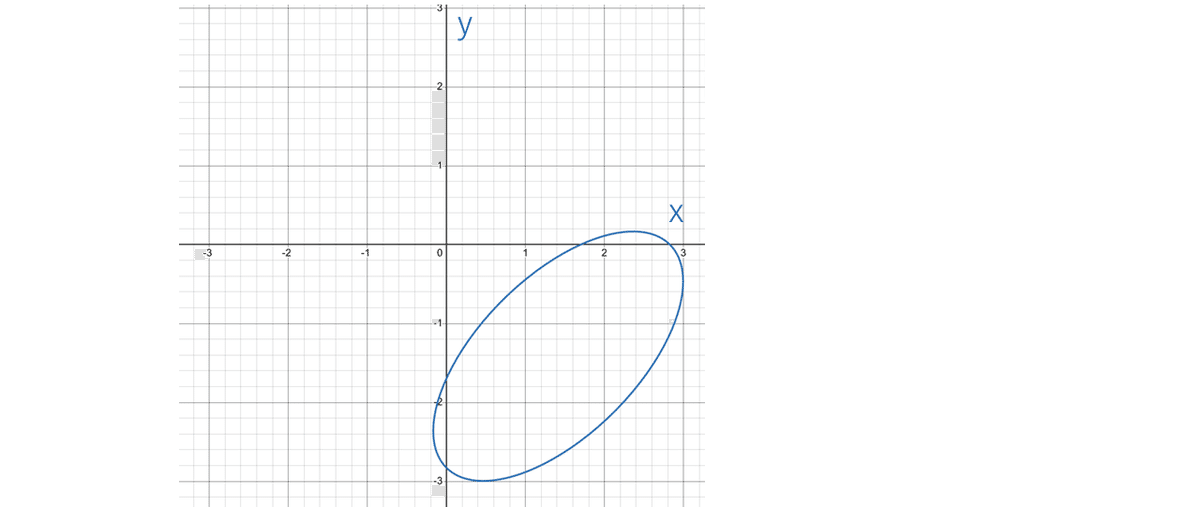
$${5x^2-6xy+5y^2-16\sqrt{2}x+16\sqrt{2}y+24=0}$$ (15)
(15)を変形
$${\begin{bmatrix}x y\end{bmatrix}\begin{bmatrix}5 3\\3 5\end{bmatrix}\begin{bmatrix}x\\y\end{bmatrix}+16\sqrt{2}(-1 1)\begin{bmatrix}x\\y\end{bmatrix}+24=0}$$ (16)
$${\bm{A}=\begin{bmatrix}5 3\\3 5\end{bmatrix}}$$
$${\Big(\begin{bmatrix}5 3\\3 5\end{bmatrix}-\lambda\bm{E}\Big)\bm{x}=\begin{bmatrix}5-\lambda 3\\3 5-\lambda\end{bmatrix}\bm{x}=0}$$ (17)
$${(5-\lambda)^2-3^3=0 (2-\lambda)(8-\lambda)=0 \lambda_1=2, \lambda_1=8}$$
$${\lambda=2(\lambda_1)}$$のとき
$${\begin{bmatrix}5-2 3\\3 5-2\end{bmatrix}\begin{bmatrix}a_1\\a_2\end{bmatrix}=0 3a_1+3a_2=0}$$
$${\bm{x_1}=k_1\begin{bmatrix}1\\1\end{bmatrix} \bm{u_1}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}1\\1\end{bmatrix}}$$
$${\lambda=8(\lambda_2)}$$のとき
$${\begin{bmatrix}5-8 3\\3 5-8\end{bmatrix}\begin{bmatrix}b_1\\b_2\end{bmatrix}=0 -3a_1+3a_2=0}$$
$${\bm{x_2}=k_2\begin{bmatrix}-1\\1\end{bmatrix} \bm{u_2}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}-1\\1\end{bmatrix}}$$
よって
$${\bm{P}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}1 -1\\1 1\end{bmatrix} ^t\bm{P}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}1 1\\1 -1\end{bmatrix}}$$
※ $${\bm{u_2}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}1\\-1\end{bmatrix}}$$も理屈ではありだが、このとき$${\bm{P}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}1 1\\1 -1\end{bmatrix}}$$
$${=\begin{bmatrix}\cos\theta -\sin\theta\\\sin\theta \cos\theta\end{bmatrix}}$$を満たす$${\theta}$$がない。対角成分($${\cos\theta}$$)は等しく
なければならない)
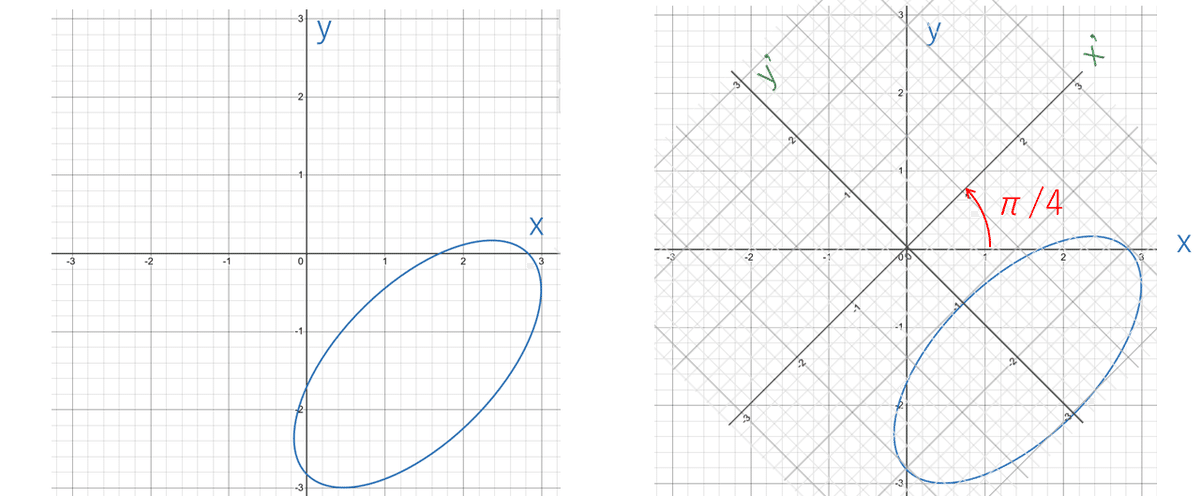
$${\begin{bmatrix}x\\y\end{bmatrix}=\bm{p}\begin{bmatrix}x'\\y'\end{bmatrix}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}1 -1\\1 1\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}=\begin{bmatrix}\cos(\pi/4) -\sin(\pi/4)\\\sin(\pi/4) \cos(\pi/4)\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}}$$
以上を(16)に代入
$${{^t\begin{bmatrix}x\\y\end{bmatrix}}\bm{A}\begin{bmatrix}x\\y\end{bmatrix}+16\sqrt{2}(-1 1)\begin{bmatrix}x\\y\end{bmatrix}+24=0}$$
$${{^t\Big\{\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}}\Big\}\bm{A}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+16\sqrt{2}(-1 1)\dfrac{1}{\sqrt{2}}\begin{bmatrix}1 -1\\1 1\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+24=0}$$
$${{^t\begin{bmatrix}x'\\y'\end{bmatrix}}{^t\bm{P}}\bm{A}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+16(-1+1 1+1)\begin{bmatrix}x'\\y'\end{bmatrix}+24=0}$$
$${{\begin{bmatrix}x' y'\end{bmatrix}}\begin{bmatrix}2 0\\0 8\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+16(-1+1 1+1)\begin{bmatrix}x'\\y'\end{bmatrix}+24=0}$$
$${\begin{bmatrix}2x' 8y'\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+16×2y'+24=0}$$
$${2x'^2+8y'^2+32y'+24=0}$$
$${x'^2+4y'^2+16y'+12=0}$$
$${x'^2+4(y'+2)^2-16+12=0}$$
$${x'^2+4(y'+2)^2=4}$$
$${\dfrac{x'^2}{2^2}+(y'+2)^2=1}$$
新しい主軸系Ox'y'(座標系Oxyを反時計まわりに$${\pi/4}$$回転)で(0, -2)を中心とする長径(x'軸方向)2、短径(y'軸方向)1の楕円である。
上では$${\bm{P}=\begin{bmatrix}\bm{u_1 u_2}\end{bmatrix}}$$としたが、$${\bm{u_1}}$$、$${\bm{u_2}}$$の順序を入れ替えてみよう。理屈ではありである。
$${\bm{P}=\begin{bmatrix}\bm{u_2 u_1}\end{bmatrix}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}-1 1\\ 1 1\end{bmatrix}}$$となるが、対角成分($${\cos\theta}$$)が等しくない。そこで$${\bm{u_2}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}-1\\1\end{bmatrix}}$$を$${\bm{u_2}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}1\\-1\end{bmatrix}}$$としよう。
$${\bm{P}=\dfrac{1}{\sqrt{2}}\begin{bmatrix} 1 1\\-1 1\end{bmatrix}}$$となる。 $${^t\bm{P}=\dfrac{1}{\sqrt{2}}\begin{bmatrix}1 -1\\1 1\end{bmatrix}}$$ $${^t\bm{PAP}=\begin{bmatrix}8 0\\0 2\end{bmatrix}}$$
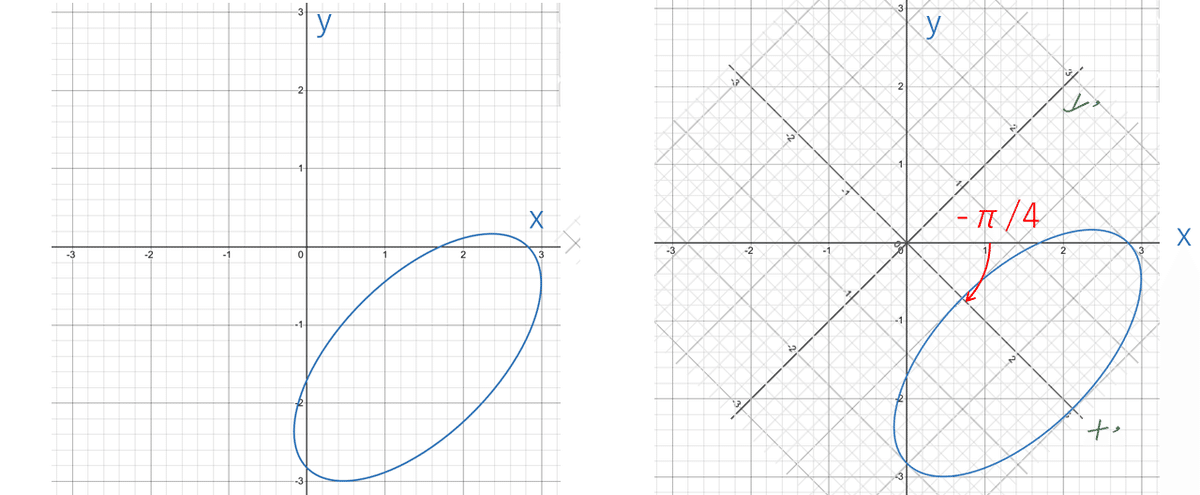
$${\begin{bmatrix}x\\y\end{bmatrix}=\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}=\dfrac{1}{\sqrt{2}}\begin{bmatrix} 1 1\\-1 1\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}=\begin{bmatrix}\cos(-\pi/4) -\sin(-\pi/4)\\\sin(-\pi/4) \cos(-\pi/4)\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}}$$
これらを(16)に代入
$${{^t\begin{bmatrix}x\\y\end{bmatrix}}\bm{A}\begin{bmatrix}x\\y\end{bmatrix}+16\sqrt{2}(-1 1)\begin{bmatrix}x\\y\end{bmatrix}+24=0}$$
$${{^t\Big\{\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}}\Big\}\bm{A}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+16\sqrt{2}(-1 1)\dfrac{1}{\sqrt{2}}\begin{bmatrix} 1 1\\-1 1\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+24=0}$$
$${{^t\begin{bmatrix}x'\\y'\end{bmatrix}}{^t\bm{P}}\bm{A}\bm{P}\begin{bmatrix}x'\\y'\end{bmatrix}+16(-1-1 -1+1)\begin{bmatrix}x'\\y'\end{bmatrix}+24=0}$$
$${{\begin{bmatrix}x' y'\end{bmatrix}}\begin{bmatrix}8 0\\0 2\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+16(-2 0)\begin{bmatrix}x'\\y'\end{bmatrix}+24=0}$$
$${\begin{bmatrix}8x' 2y'\end{bmatrix}\begin{bmatrix}x'\\y'\end{bmatrix}+16×(-2x')+24=0}$$
$${8x'^2+2y'^2-32x'+24=0}$$
$${4x'^2+y'^2-16x'+12=0}$$
$${4(x'^2-4x'+4)-16+y'^2+12=0}$$
$${4(x'-2)^2+y'^2=4}$$
$${(x'-2)^2+\dfrac{(y'+2)^2}{2^2}=1}$$
新しい主軸系Ox'y'(座標系Oxyを時計まわりに$${\pi/4}$$回転)で(2, 0)を中心とする長径(y'軸方向)2、短径(x'軸方向)1の楕円である。
以上
双曲線、放物線についても具体例をあげるつもりだったが疲れた。まあこれでよしとしよう。
取りあえず源流のいけるところまでいったということで下流に戻ろう。下流に大きな深みがないことを祈る。あっぷっぷ
追記
グラフの描画にはじめエクセルを使ったが、媒介変数を使ってx、yを出して散布図にした。面倒なので iPadのアプリを探したらf(x, y)=0をそのまま入力したら描いてくれる便利なものが見つかった。どうやってx ,yを求めているのか、まさか裏で主軸変換していることはいないだろうがアルゴリズムに興味が湧く。そのうち調べたい。使ったのは↓のiPad版。便利な世の中になった。
この記事が気に入ったらサポートをしてみませんか?