ROS備忘録_ps4コントローラで速度指令

ps4コントローラとマシンの接続
sudo ds4drvこれで下図のようにマシンとps4のコントローラの接続が完了

ps4コントローラの情報を配信
roscoreでマスタを立ち上げたあとに
rosrun joy joy_nodeでトピックを配信する。下図のような出力がでれば、コントローラの情報を配信できているはず。

rostopic echo /joy上記のコマンドでトピック/joyを確認すると、コントローラから配信された情報を下図のように出力画面で確認できる
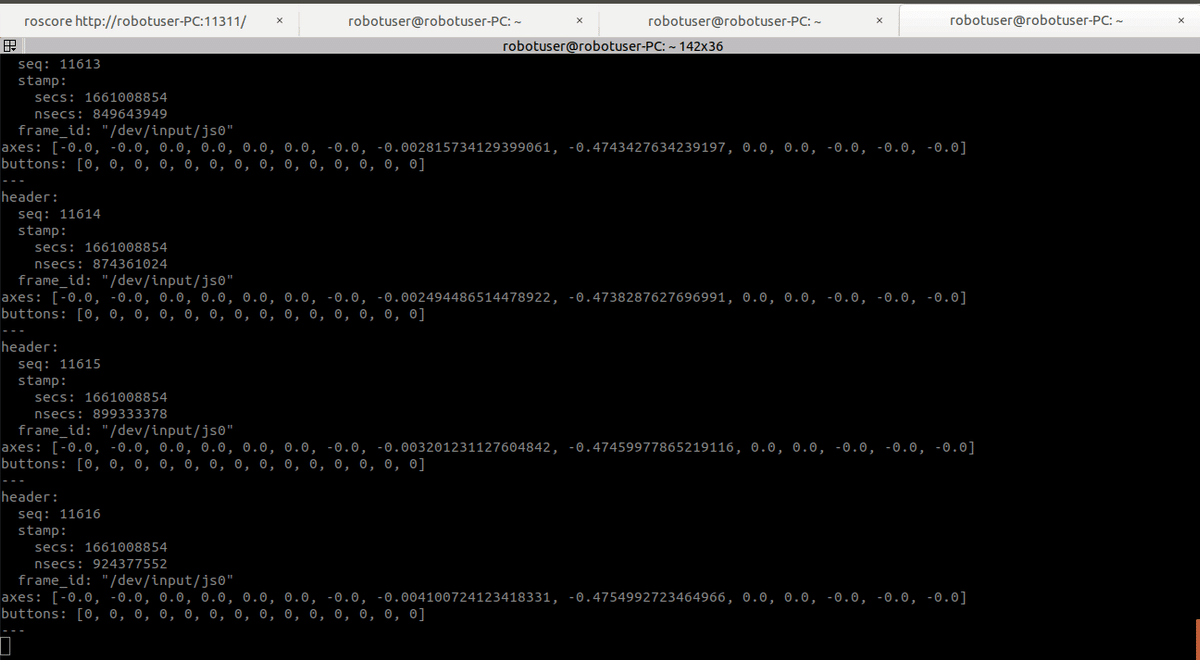
ちなみにこの状態で
rqt_graphでノードとトピックの状態を確認すると下図のようになる。

/rostopi_4985_1661009209968はrostopic echoは/joyを確認するシェルのことのはず。
この記事が気に入ったらサポートをしてみませんか?