maxon_epos 備忘録

下記でできることとか、やったことを整理する。忘れないように。
まずはsrcにgithubからクローンしてcatkin_makeする
下に示す2つの図のlaunchファイルを実行する

そしたらRvizが立ち上がって、なぞの球体と矢印で構成された物体が召喚される。rqt_graphで起動されているノードとトピックの関係を確認する。


EPOSの制御モード
Profile Position Mode (PPM)
Profile Velocity Mode (PVM)
Cyclic Synchronous Position Mode (CSP)
Cyclic Synchronous Homing Mode
下記のPVMのサンプルコードを実行できそうなlaunchファイルを起動
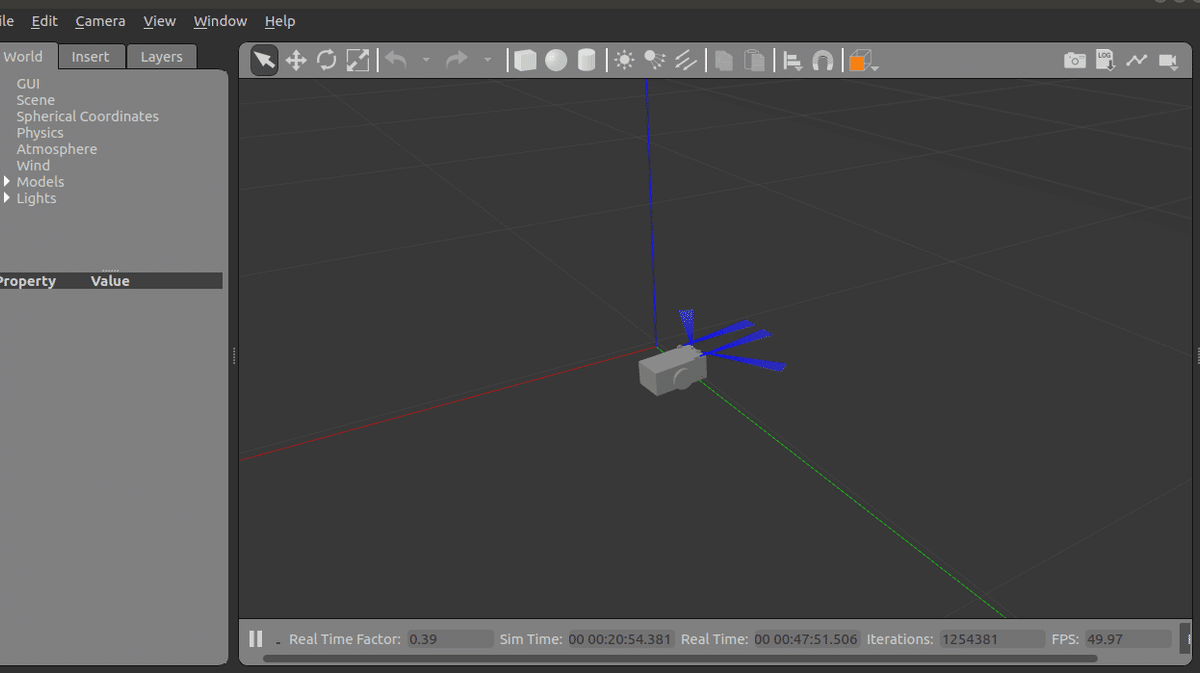
その他に自作のPS4コントローラからcmd_velトピックを配信して、
自作のURDFモデルのロボットをGazebo上で操作
そのときのrqt_graphを表示
maxson関連のノードは2つ、どこにも繋がってないし、何も配信していない
roslaunch maxon_epos4_canopen_motor_2dof_pvm.launch
参考になりそうなサイトを発見
ros_control作成



ros_cotrol作成Part2

この記事が気に入ったらサポートをしてみませんか?