Tips.007 [PIDチューニング・スライダー編]

初めてのドローン設定時や機体が上手く飛ばない時、ここの設定で悩む方は多いのではないでしょうか。
Betaflight 4.1からデフォルトの設定値で”ほぼ”全ての機体が飛ぶようになりました。しかし、デフォルトのままでは振動が出たり動作が安定しなかったりと問題が生じることが多々あります。
基本設定のこの章では深くは触れませんが、ある程度の要点を抑えていこうと思います。
基本設定のこの章ではRoll, Pitch, Yawの三次元方向に対するP, I, Dmin, Dmax, Fの説明は省きます。基本設定の間はここの意味を理解するよりも下のスライダーを理解した方が手っ取り早いです。
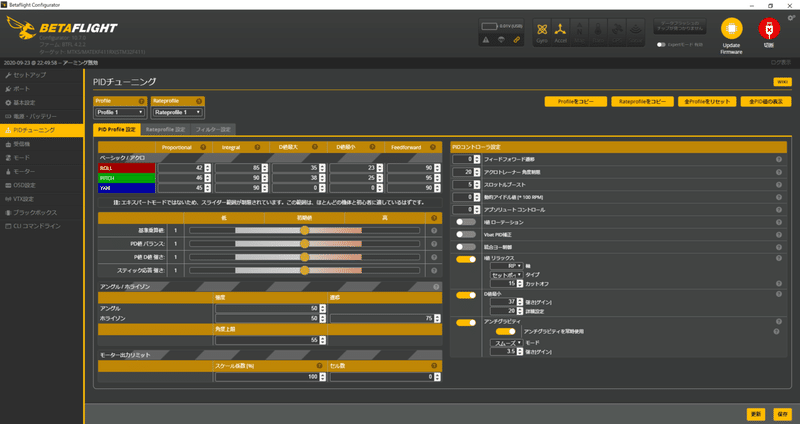
スライダー
・基準乗算値
P,I,Dの数値を全体的に上げるか下げるか調整します。
・PD値バランス
P,Dのバランスを調整します。機体に振動が出るのであればDが高くなる方向に0.1ずつあげていき、機体のレスポンスが悪いと感じたらPが高くなる方向に調整します。
・P値 D値 強さ
軽量な5インチ機体やToothpickのように機体重量に対してパワーが出すぎる機体の場合は0.7にしてから徐々に上げていきましょう。ここが高すぎるとモーターやESCに負荷を与えることになります。TinyWhoopのようにパワーの少ない機体の場合は0.1ずつ上げていき、安定する数値を見つけます。
・スティック応答強さ
Fを調整します。ここはスティック操作に対しる反応の調整をする箇所なので0.7と1.3など大きく値を動すことで比較し、好みに合った方向に調整します。
この記事が気に入ったらサポートをしてみませんか?