
【分解LOG】中華製ペットフィーダ WOPET

今回の記事は2020/5/21に行われた「#分解のススメ」というニコ技深圳コミュニティのイベントに参加して、私も書いてみようかなと触発された記事です。
そのため、参加されていた方のような専門知識や深い技術は有りませんので、ご了承を。あくまで、備忘録として分解Logを残しておくのは非常に意味があるとわかったのでその実践という意味合いが深いです。
(ちょうどこの前、元三洋の技術者だった叔父から「なにかモノを作ったり分解する仕事についたなら、そういうことは記録しておけ」と言われてたので、ちょうどいい機会でした)
分解対象

今回、分解して中身を見ていくのはこちらの中華製ペットフィーダ。国内で販売されていた名称では、WOPETという商品。こちらの国内在庫はすべてなくなっていますが、アップデート品はamazonでも、Aliexpressでも、陶宝でもどこでも売っています。

こちらは当方(今年新卒)が大学時代に研究で使っていた製品で、故障した際に原因究明のために、分解したときについでに写真に撮ったものをレポート化したものです。
対象の動作について
まずは分解の前に、対象の振る舞いについて提示します。図はテキトーにVISIOで。

内容としては非常にかんたん。投入された餌を、底部に搭載されているモータが回ることで一定量投下することができます。
あとカメラによる監視機能、Wifiを使った遠隔給餌などができます。これが基本的な本製品の機能です。
分解の流れ
すでに昨年、分解をしてしまったためレポートに必要な画像が少ないので、文面でこちらは表記。必要な分解の手順は以下の通り。
・底面のゴム足を除去、電池蓋裏も含め、合計六箇所のビスを外す
・側面がツメで止まっているため、両サイドからチョップすることで外れる(安全な方法を考えたが、数台分解する中で、これが最も安全かつ破損なく外れることが判明)
・制御基板から断線しないように、ケーブルのホットボンドを除去
・底部から全面設置の基板へのメインハーネスを分離
・分解完了!
分解だけ見てもすごい簡単。大きい機械なので、スペースも余りあるため、あまり破損を気にせず分解できました。
底部

さて、分解後の底面です。(ちなみに破損原因は写真下部のUSB給電口のはんだクラックという単純な内容でした)
底部の構成としては、給餌用のプロペラを回す中央部、回転数を判定するクリックスイッチ、駆動力を伝えるプーリーとモータ、給電用の電池・USB給電口です。

詳しく見ていきます。まずは給餌用のプロペラを回す中央部、回転数を判定するクリックスイッチ。ここの構造が個人的にすごくツボに入ったところです。
給餌量の判定をモータの回転数で制御するのではなく、写真のように特殊な構造体が回転することで、1/8周ごとにクリックスイッチが押される仕様。それを感知することで1回分の給餌を行ったと判定する機構になっています。
普通であれば、モータの回転数と時間で制御して動きを止めればすむものと考えますが、なぜこのような制御機構をしているのかが非常にそそられます。(しかし私の知識・経験不足もあり、なぜそうしてるのかの思考はできずじまいでした...)

また、プーリー部はかなり脆弱なゴム2本で動かしています。これは1年持つのでしょうか...と心配になるほど。まだ紫外線劣化は避けられるものの、使用環境によっては耐久年数が非常に短い製品の可能性もあります。
ここはその値段(2万円)に対して、いただけないところ。
モータは一般的なトイモータと同じでした。プラズマダッシュモータを入れて、クリックセンサを取り払えば、爆速給餌器ができますが、まあ何に使えるのかというお話です。
基板部

続いて基板部です。まず写真で見てわかるように、メイン基板からは2本の拡張ケーブルが伸びており、それぞれ右上がWifiアンテナ、左上がボタン、ステータスランプ、マイクが搭載された操作用外部基板です。
一応、表面を見てわかるように基板に未実装のところは見当りませんでした。
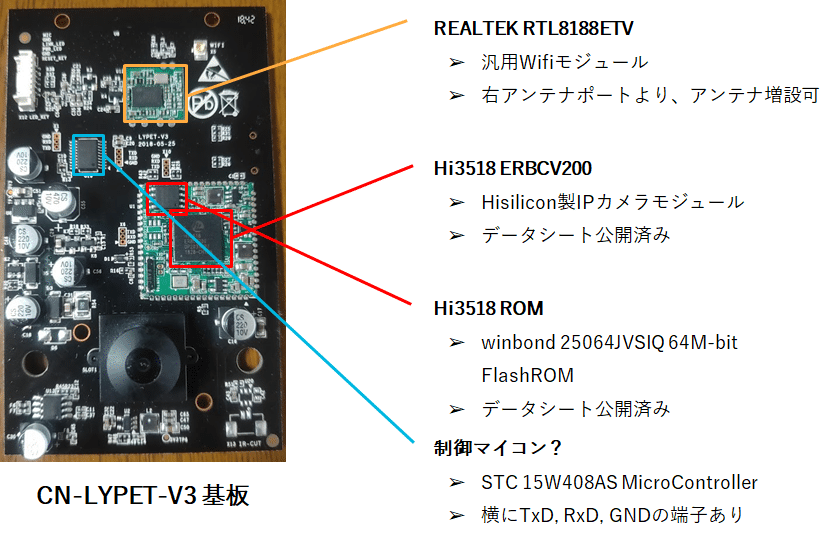
本基板はCN-LYPET-V3と印刷されており、中国向けの製品であること、LYPETという名称が基板に与えられていること、すでに2回はバージョンアップされていることがわかりました。
しかし、LYPETと百度やGoogleで調べても出てこずじまいでここから、どうやって調べようかと悩んでいるところです。
搭載されている主要な部品は、以前調べていましたのでその資料をぶっこ抜いてきました。画像が小さくて文字が読めないので、以前調べた情報からのアップデートは不可能そう...
小さな部品は当時はあまり気にしていなかったため、印刷が見えるような写真が有りませんでした。こういうところをちゃんと取らねばですね。というわけで思い立ったら吉日。サクッとマイクロスコープを購入。
あと以前、twitterで見たのを思い出したが、TF to SD(通常の変換と逆)にwifi搭載SDを使うことでPCに直接画像を送れる方法があったので、そちらも注文。持ってたと思うけど、どこにやったのか。

背面を見ればわかりますが、両面実装ではないようです。また、通常用途では消費者がアクセスできない位置にSDスロットがありました。
提供されているアプリではSDカードを利用(記憶領域を使用した操作)することができなかったため、おそらくペットフィーダー用の汎用基板の使い回しが行われているのでは無いでしょうか。
また、ご丁寧にメインハーネスのコードの概要が書かれているので、ハードの改造も行いやすそうでした。
所感
大まかな機能制御としては、Hi3518メインとなり、カメラモジュールとWifiを通じた操作を行い、一部機能を拡張することで底部モータの制御を行っているのではないでしょうか。そのため、クリックスイッチによる間接的なコントロールをせざるを得ない状況になっているのではないかと。
このあたりはきちんと基板パターンを読めるようになれば、なぜそうしているのかがわかるようになると思うので、勉強が必須です。プリント基板の読み方や、kicadの使い方などが講座にも有りましたので、stay homeの時期に勉強しておきたいところ。
一応、Hi3518を搭載したIPカメラは別の方がシリアルポートを用いたハック・制御方法を実践されていました。本製品にもTxD, RxD, Gndの受け口はあるため、うまく行けばこれで制御方法を知ること、またこちらから制御することが可能となるかもしれません。
大雑把ですが、これで全てです。メイン基板一枚と給餌操作のメカが組み合わさっただけのかんたんな機械が2万円もすることが驚きです。
以前撮っておいた画像を元に分解Logを書いてみましたが、文書にまとめていくと、調べきれていなかったことが色々と分かりました。これを続けていくことが、分解を行う上でのマストで調べるべきこと、何を写真に収めておいたほうがいいのかを知ることになるのでしょう。
当方、こんなことを大学でしておきながら、専門は微生物学なので専門知識は無いまま色々と当時は調べていました。過ぎた話ですが大学時代にこのようなことに興味のある友人や困ったら聞ける先生がいればなぁ...と思う限りです。
分解マスターへの道は遠い... 今回の面白い機会を元に楽しめるようにLogをつけていけるようにします。
この記事が気に入ったらサポートをしてみませんか?