Arduinoでブラシレスモーターを回してみました。

使用マイコン
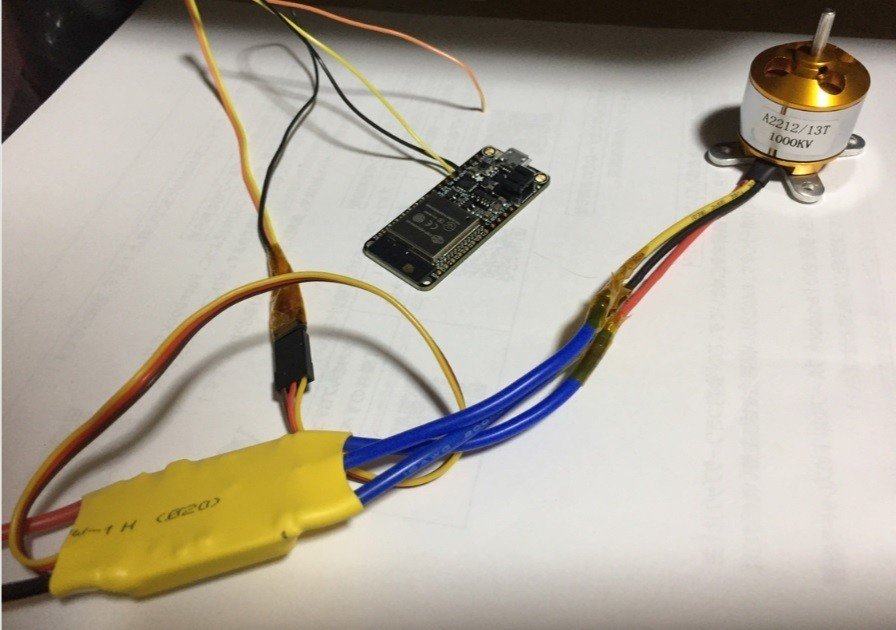
Adafruit HUZZAH32 - ESP32 Feather Board 千石にて購入
ブラシレスモーターとESC A2212/13T,VW-1H Amazonにて購入
ESCに入力した電圧 10V
ピンはA0を使用

ポイントはキャリブレーションを正しくするとちゃんと回ります。
プログラム
その1 パルスを自作
// brushless motor
// motor : A2212/13T
// ESC VW-1H(020)
int motorPin0 = 26; //A0
void setup() {
Serial.begin(115200);
pinMode(motorPin0,OUTPUT);
for (int i=0; i <= 100; i++){
digitalWrite(motorPin0, HIGH);
delayMicroseconds(2000);
digitalWrite(motorPin0, LOW);
delay(20);
}
delay(2000);
for (int j=0; j <= 100; j++){
digitalWrite(motorPin0, HIGH);
delayMicroseconds(1000);
digitalWrite(motorPin0, LOW);
delay(20);
}
delay(2000);
}
void loop(){
digitalWrite(motorPin0, HIGH);
delayMicroseconds(2000);
digitalWrite(motorPin0, LOW);
delay(20);
}
その2 パルスはLEDC_CHANNELを使用
// brushless motor
// motor : A2212/13T
// ESC VW-1H(020)
#define LEDC_CHANNEL_0 0
#define LEDC_TIMER_BIT 10
#define LEDC_BASE_FREQ 50 //50Hz 0.02s 20ms
#define SRV_PIN 26
int min0 = 51; // (51/1024)*20ms = 1 ms
int max0 = 102; // (102/1024)*20ms = 2.4 ms
void setup() {
Serial.begin(115200);
ledcSetup(LEDC_CHANNEL_0, LEDC_BASE_FREQ, LEDC_TIMER_BIT);
ledcAttachPin(SRV_PIN, LEDC_CHANNEL_0);
ledcWrite(0, max0);
delay(2000);
ledcWrite(0, min0);
delay(2000);
}
void loop(){
ledcWrite(0, max0);
}
この記事が気に入ったらサポートをしてみませんか?