
ホーバークラフトアップデート(その2)

前回から一月経過しましたが、漸く大陸から電池と接続ケーブル到着したので浮上させてみた。
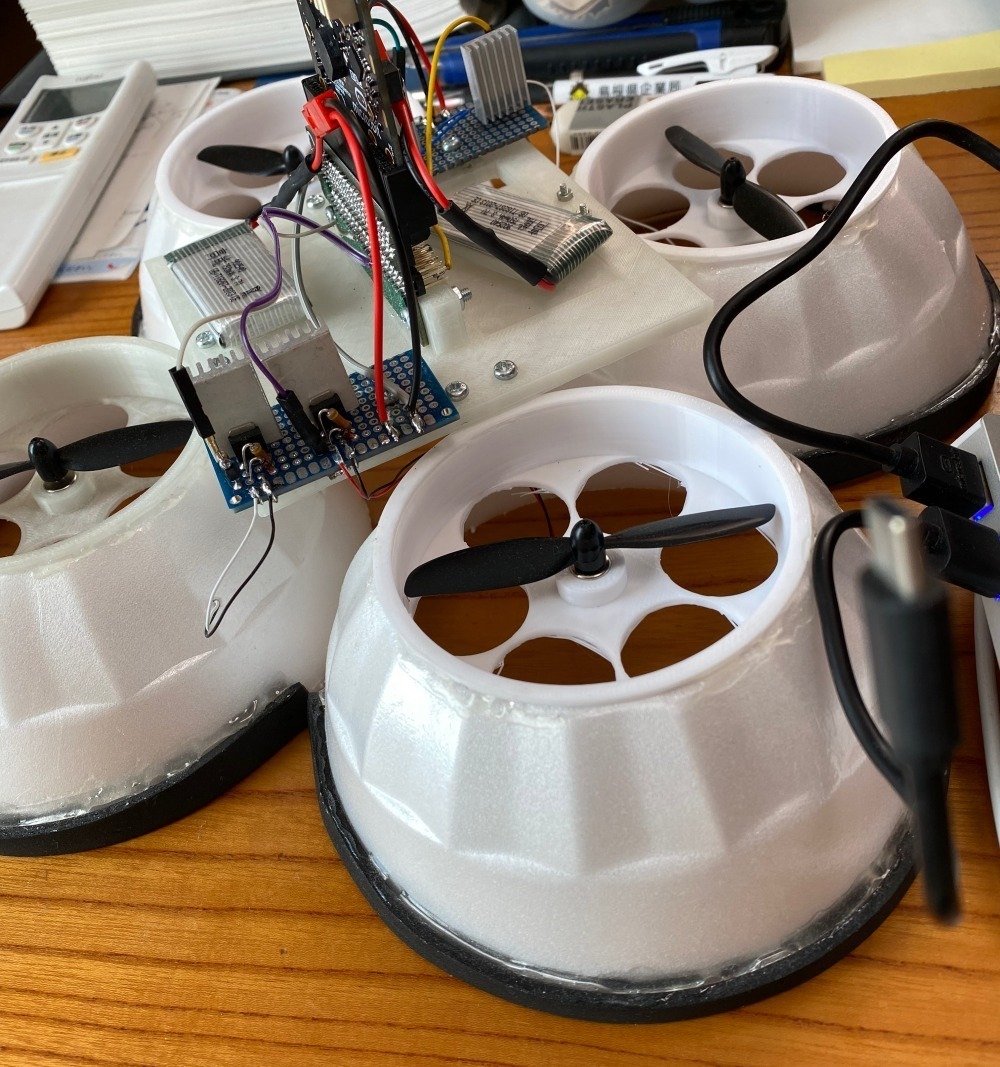
制御用のmicro:bitを用意して、radio機能を使ってコントロールしています。今は浮上と停止だけの機能ですが。
モーター4個は同じ電圧(PWM制御上)になってますが、どうしてもバランスは崩れているのでドリフトしています。モーターのPWM制御値を調整すれば見た目固定的に浮上できるだろうし(本来はドローンと同じように位置を制御しないといけないはずですが、micro:bitに相当のセンサー機能はついてない)、移動は隣り合うモーターセットごとに回転速度差、方向制御もドローンと同じccw/cwのモーターセットで回転数の差をつけることで回転モーメントを発生させることで対応できます。
電池一個で公称700mAh程度ですが、電池一個でモーター2個駆動だから電池寿命は予測15分ぐらいでしょうか。あとmicro:bitは今は電源別ですが、これはLi-ion電池のおよそ4Vを給電すれば良さそうです。
おそらく移動させるよりも、停止状態を保持する方が難しい、なぜならば自分の位置情報を取得できないから。
この記事が気に入ったらサポートをしてみませんか?