
【応用編】直動+揺動の複合運動するモーター負荷トルクの計算とボールネジを用いた直動運動するモーター負荷計算例

ここでは直動系と揺動系が混ざった動作におけるモーター負荷計算の計算例とボールネジを用いた直動運動するモーター負荷計算例を紹介します。
これまで紹介した回転系、直動系の負荷トルク計算の応用編になります。実際の設計においては、このような複合的なものが多いと思います。
問題は2問ありますが、マスターしておきたい計算例題になります。
【直動+揺動の複合運動するモーター負荷トルク計算】
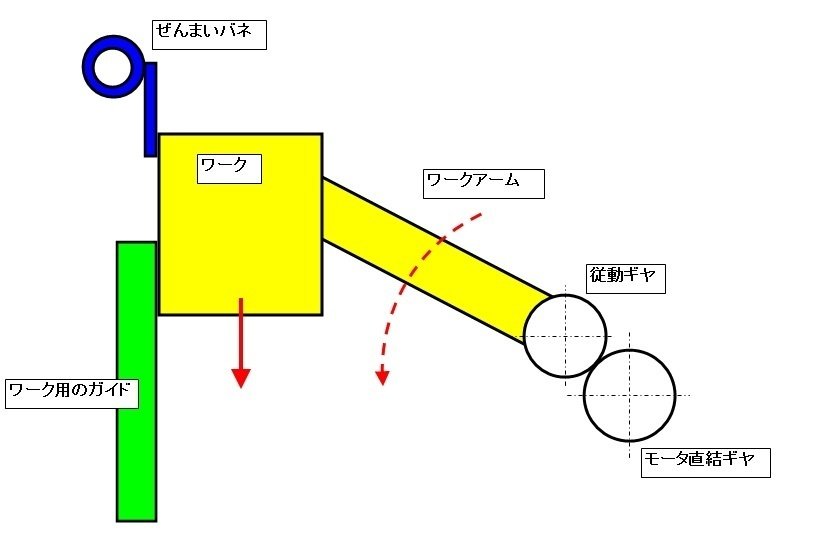
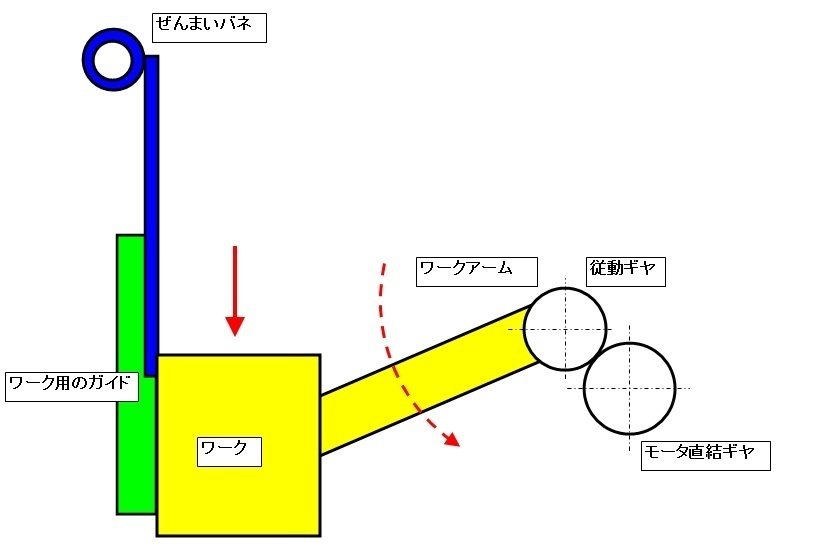
【図-1】【図-2】のようにモータ直結ギヤと従動ギヤがあります。従動ギヤとアームは結合されており、モータが回転するとアームは従動ギヤの中心を軸として円孔を描くように揺動します。この時、ワークはアームに追従しワーク用のガイドに沿って直線運動をします。ぜんまいバネは常に一定の力でワークを上へ引っ張りあげるものとします。また、ワークとアームの関係は、ワークはアームに押し下げられたり、押し上げられたり、追従するような機構になっているものとします。モーター負荷トルクTを求めましょう。
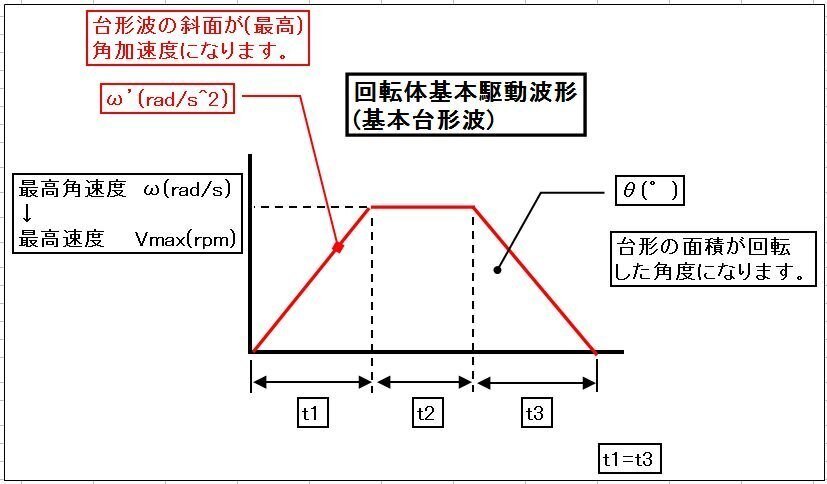
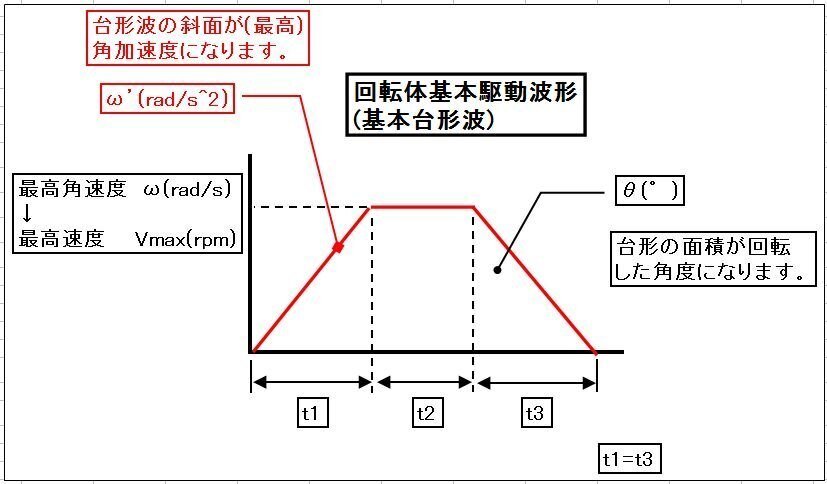
駆動波形は【図-3】のような形で動かすものとします。
但し、モーター従動ギヤ半径:r=2(cm)、モーター従動ギヤ質量:M3=10(g)、モーター直結ギヤ半径:R=3(cm)、モーター直結ギヤ質量:M4=15(g)、アーム幅、長さ:a=2(cm)、b=14(cm)、アーム質量:M2=80(g)、ワーク質量:M1=330(g)、加速(減速)時間:t1(t3)=0.05(s)、等速時間:t2=0.35(s)、モーター回転角度:θ=360(°)、ワーク移動量:E=11(cm)モーター1回転当たりの移動量:A=(360x11/360)x(3/2)=16.5(cm)(A=(360xE/θ)xギヤ比)、ぜんまいバネ:Fs=250(gf)(一定)
モーター負荷トルクTは下記式で求められます。
T=Tr(加速トルク)+Tc(外的負荷トルク)
※外的負荷トルクは主に摩擦トルクのことです。
【回転系負荷トルク】
T= 〔Ir x (モータギヤ/ワークギヤ)^2 〕 x ω'
【直動系負荷トルク】
T= Ic x ω'
但し、Ic=Jc/gで、Jc=Mc x (A/2π)^2 です。
それぞれを求めてみましょう。
まずは、加速度によって生じる物体のイナーシャによる負荷トルク(Tr)を求めます。この時、回転系の負荷と直動系の負荷に分けて考えます。
回転運動系のイナーシャは、<モーターギヤ、従動ギヤ、アーム>になります。直動運動系のイナーシャは、<ワーク>になります。
回転運動系イナーシャIr (g・cm・s2) を求めます。
Ir=(GD^2/4)/g=Jr/g
ここで、Jr= Mr x K^2 = Mr x (r^2/2) (g・cm2)
但し、Mr:質量(ギヤの質量) (g) r:回転半径(ギヤの半径) (cm)
g:重力加速度 980 (cm/s2)より、
Ir(従動ギヤ)=10x(2x2/2)/980=0.02 (g・cm・s2)
Ir(モーターギヤ)=15x(3x3/2)/980=0.07 (g・cm・s2)
次に、Ir(アーム)を求めます。
同じ回転運動系のイナーシャですが、長方形の場合、K^2は下記になります。K^2=(a^2+b^2+12xL^2)/12
但し、aは長方形の幅(cm)、bは長さ(cm)また、回転軸が重心X0から外れるX1軸の場合、LはX0軸とX1軸の距離(cm)、形状によりK^2は異なりますので、計算の際には注意が必要です。ここでは、L=5(cm)とします。実際の設計業務においては、重心はCADで簡単に求めたられますのでそれを活用したりします。
Ir(アーム)=(80 x (2x2 + 14x14 + 12x5x5)/12)/980 =3.4
直動運動系イナーシャIc (g・cm・s2) を求めます。
Ic=(GD2/4)/g=Jc/g
ここで、直動運動する物体のイナーシャ(慣性モーメン)の式
Jc=Mc x (A/2π)^2 (g・cm2)
但し、Mc:質量(ワークの質量) (g) g:重力加速度 980 (cm/s2)
A:単位移動量 (cm/rev) より、
Ic=(330)x(16.5/2xπ)x(16.5/2xπ)/980=2.32 (g・cm・s2)
よって、加速トルクTrは、
回転系(従動ギヤ)の加速トルク:
Tr= Ir x(モータギヤ/ワークギヤ)^2 x ω'=0.02 x (3/2)x(3/2) x ω'
回転系(モーターギヤ)の加速トルク:
Tr= Ir x ω'=0.07 x ω'
回転系(アーム)の加速トルク:
Tr= Ir x(モータギヤ/ワークギヤ)^2 x ω'=3.4 x (3/2)x(3/2) x ω'
ここで、ギヤ比(3/2=1.5倍)により、アームの揺動量は、1.5倍になっています。イナーシャはギヤ比の2乗に比例するので、アームのイナーシャは、1.5x1.5=2.25倍になります。
直動系の加速トルク: Tr= Ic xω'=2.32xω'
但し、Ir:回転運動系 イナーシャ (g・cm・s2)
Ic:直動運動系 イナーシャ (g・cm・s2) ω' :モーター 角加速度 (rad/s2)
ω'を求めます。
まずは最高角速度ωを求めます。回転角度は台形の面積となるので、
ω x (t1+t2) = (θ x π)/180 (rad/s)
但し、t1、t2はX軸の時間 (s) θは回転角度 (°)
ω=θxπ/(180x(t1+t2)) (rad/s)
ω=360xπ/(180x(0.05+0.35))=15.7 (rad/s)
ここで、求める最高角加速度ω'は台形波の斜辺となります。
ω'=ω/t1=〔θxπ/180x(t1+t2)〕/t1 (rad/s2)より、
ω'=15.7/0.05=314 (rad/s2)
よって、
回転系の加速トルク(従動ギヤ):
Tr=Ir x(モータギヤ/ワークギヤ)^2 x ω'
=(0.02) x (3/2) x(3/2) x 314 =14.13 (g・cm)
回転系の加速トルク(モーターギヤ):
Tr=Ir x ω' =0.07 x 314 =21.98 (g・cm)
回転系の加速トルク(アーム):
Tr=Ir x(モータギヤ/ワークギヤ)^2 x ω'
=(3.4) x (3/2) x (3/2) x 314 =2402.1 (g・cm)
直動系の加速トルク:
Tr=Ic xω' =2.32x314=728.48 (g・cm)
回転系の加速トルク:
Tr=2438.21 (g・cm)
このように、加速に伴うトルクが、とても大きな数値になっています。これは、加速時間が0.05sという短い時間で加速させていることと、運動量をギヤ比により増加させたことによって、イナーシャがギヤ比の2乗で効いてきたため、このような数値になっていることが、分かると思います。また、このような場合、使用するモーターによって、負荷イナーシャとモーター許容イナーシャを比較し、チェックを行うことが大切な場合もありますので、注意が必要です。
次に外的負荷(バネや摩擦など)によって生じる物体の外的負荷トルク(=摩擦トルク)Tcを求めます。補足:ぜんまいバネの力Fsは250(gf)で、常に一定の力でワークを上側に引っ張り上げていることとします。
直動運動する外的負荷トルク(摩擦トルク)の式
Tc=F x D/(2 x n x i) (g・cm)
水平の場合:F=Fa +μ x N
傾きがある場合:F=Fa + mg x (sinθ + μcosθ)
但し、F:直動運動方向の力 (gf) D:モーターギヤ直径 (cm) n:効率(0.85~0.95) i:減速比 Fa:外力(バネなど) (gf) μ:摺動面の摩擦係数(0.05) N:垂直方向荷重(=mg) (gf) m:ワークとラックの総質量 (g) g:重力加速度 980 (cm/s2) θ:傾き角度 (°)
では、まずはFを求めます。
垂直なので、F=Fa+μN のN(=垂直抗力)は、”0”になります。
ここで、Faを考えます。Faは、バネ力などの負荷になりますが、この場合、バネ力が一定のため、ワークとバネ力の差が、総質量となり、負荷になります。今回の例題の場合、バネ力が常に一定で、且つ、ワークを上側に引っ張り上げていることを念頭に、上り、下りのそれぞれの加速、減速時において、負荷を助ける側になるのか、負荷を掛ける側になるのか、を考慮する必要があります。本例題のようにバネ力が常に一定で且つワークを引っ張り上げている場合は、
Fa= Fs +W=-250+330= 80(gf) になります。
ここで、〔上り〕と〔下り〕でFaは異なることに注意します。
〔上り〕の加速時は、"+"になります。⇒ (トルクを助けない方向<モーターに負荷をかける方向>)
〔上り〕の減速時は、"-"になります。⇒ ((トルクを助ける方向<モーターに負荷をかける方向>)
〔下り〕の加速時は、"-"になります。⇒ (トルクを助ける方向<モーターに負荷をかけない方向>)
〔下り〕の減速時は、"+"になります。⇒ (トルクを助けない方向<モーターに負荷をかける方向>)
より、〔上り〕と〔下り〕に分けてそれぞれのFaを求めます。
モーターに負荷をかける方向:〔上りの加速時〕〔下りの減速時〕
Fa=+80(gf)
モーターの負荷を助ける方向:〔上りの減速時〕〔下りの加速時〕
Fa=-80(gf)
⇒モーターに最大負荷をかけるのは、〔上りの加速時〕
よって、直動運動する外的負荷トルク(摩擦トルク)は、
Tc=F x D/(2 x n x i) (g・cm)より、
Tc=80 x (3x2)/(2 x 0.95 x 3/2) = 480/2.85 = 168.42(g・cm)
ここで、上述で計算した結果をまとめます。
回転系の加速トルク Tr=2438.21 (g・cm)
直動系の加速トルク Tr=728.48 (g・cm)
外的(摩擦)負荷トルク(上り) Tc=168.42 (g・cm)
”上り”の加速時に発生する、モーター最大負荷トルクは、
T= Tr(回転&直動系の加速トルク)+Tc(外的負荷トルク(=摩擦トルク))より、T=(2438.21+728.48)+168.42=3335.11 (g・cm)
モーター最大負荷トルクT=3335.11(g・cm)
このように、モーター最大負荷トルクの多くを加速トルクが占める場合、実際の駆動制御においては、下降時と上昇時の速度を変更(下降時は速く、上昇時は遅く、など)したり、加減速時間を見直したり、バネ力やワーク質量を見直しするなどして、負荷トルクを調整したりするのが一般的な手法だと思いますが、場合によっては、計算された負荷を満たすモーターを選定しなければならない場合もあり、実業務では、それぞれの条件下により、異なってくると思います。いずれにせよ、このように計算をしておくこで、どこを調整すれば、効率よく負荷トルクを調整できるのか、を視覚化できることは、計算するメリットの1つであると言えるでしょう。
【ボールネジを用いた直動運動するモーター負荷トルク計算】
ここではボールネジとリニアガイドを使用した直動系の機構を例に、モーター負荷トルクを実際に計算してみましょう。この時、バネ力の妥当性も確認してみます。
【モーター負荷トルク計算】
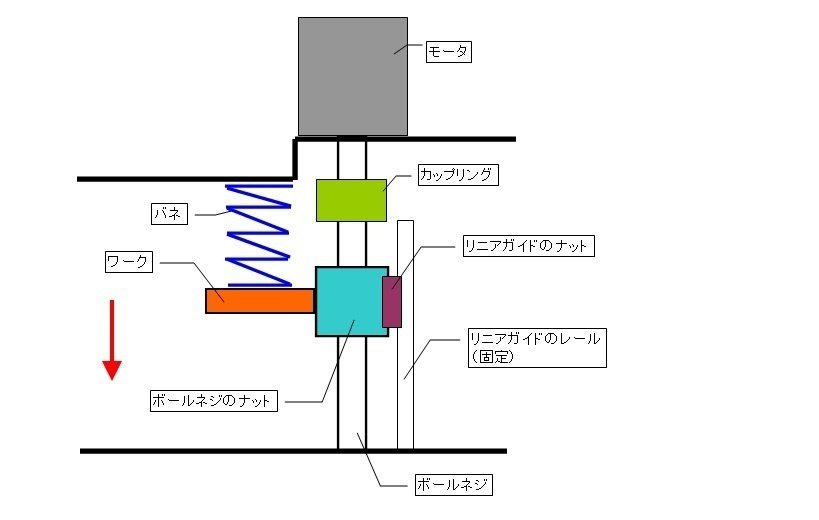
【図-4】のようにボールネジ&リニアガイドがあり、ワークはボールネジナットに固定されています。ボールネジナットとリニアガイドも固定されています。カップリングはモーターとボールネジを連結させ、モーターが回転することにより、ボールネジナット、リニアガイドナット及びワークが直動運動します。この時、モーター、ボールネジ及びカップリングは回転運動します。駆動波形は、【図-5】のような形で動くものとします。
回転運動:モーター、カップリング、ボールネジ
直動運動:リニアガイドナット、ボールネジナット、ワーク
外部力:バネ
モーター負荷トルクTを求めましょう。
但し、カップリング半径:r=1(cm)、カップリング質量:m=13(g)、ボールネジ半径:r=0.4(cm)、ボールネジ質量:m=36(g)、ボールネジリード:A=1.5(cm/rev)、リニアガイドナット質量:m=33(g)、ボールネジナット質量:m=190(g)、ワーク質量:m=77(g)、加速(減速)時間:t1(t3)=10(msec)=0.010(s)、等速時間:t2=5(msec)=0.005(s)、ワークの移動距離:L=1.2(cm)、モータ自身のJ:J=8(g・cm2)、バネ力:圧縮コイルバネ(押しバネ)で最大動作時:f=2000(gf)
モーター負荷トルクTは下記式で求められます。
T=Tr(加速トルク)+Tc(外的負荷トルク)
※外的負荷トルクは主に摩擦トルクのことです。
それぞれを求めてみましょう。まずは、加速度によって生じる物体のイナーシャによる負荷トルク(Tr)を求めます。この時、回転系の負荷と直動系の負荷に分けて考えます。回転運動系のイナーシャ(ギヤ) と 直動運動系のイナーシャ(ラックとワーク)に分けて考えます。
回転運動系イナーシャIr (g・cm・s2)
Ir=(GD2/4)/g=Jr/g
ここで、Jr=Mr*K2=Mr*(r2/2) (g・cm2)
但し、Mr:質量(モーターギヤの質量) (g)、r:回転半径(モーターギヤの半径) (cm)、g:重力加速度 980 (cm/s2) より、
カップリング:Ir=13*(1*1/2)/980=0.007 (g・cm・s2)
ボールネジ:Ir=36*(0.4*0.4/2)/980=0.007 (g・cm・s2)
モータ自身:Ir=8/980=0.008(g・cm・s2)
直動運動系イナーシャIc (g・cm・s2)
Ic=(GD2/4)/g=Jc/g
ここで、Jc=Mc*(A/2π)^2 (g・cm2)
但し、Mc:質量(ラックとワークの質量) (g)、g:重力加速度 980 (cm/s2)、A:単位移動量(リード) (cm/rev)
Ic=(33+190+77)*(1.5/2*π)2/980=0.017 (g・cm・s2)
加速トルクTrは、
回転系の加速トルク:Tr=Ir*ω'=(0.007+0.003+0.008)*ω'
直動系の加速トルク:Tr=Ic*ω'=0.017*ω'
但し、Ir:回転運動系イナーシャ (g・cm・s2) Ic:直動運動系イナーシャ (g・cm・s2)
ω' :モーター角加速度 (rad/s2)
ω'を求めます。
まずは最高角速度ωを求めます。回転角度は台形の面積となるので、
ω*(t1+t2)=θ*π/180 (rad/s)
但し、t1、t2はX軸の時間 (s)、θは回転角度 (°)、ボールネジのリードは1.5(cm/rev)です。
ワークを1.2cm可動させるためには、θ=(1.2/1.5)*360=288°
ω=θ*π/(180*(t1+t2)) (rad/s)より、
ω=288*π/(180*(0.010+0.005))=334.93 (rad/s)
【余談】負荷トルク計算には関係ありませんが、加速度Gとrpmを求めてみましょう。どのぐらいのGがかかってるのでしょうか?また、モータはどれだけ速い回転をしているのでしょうか?試しに求めてみます。
・加速(減速)時間:t1(t3)=10(msec)=0.010(s)
・等速時間:t2=5(msec)=0.005(s)
・ワークの移動距離:L=1.2(cm)
Vmax*(0.010+0.005)=1.2より、Vmax=80(cm/s)
加速度Amax=80/0.010=8000(cm/s2)
G=Amax/g=8000/980=8.2G
よって、自重1G+加速度8.2G
ボールネジリードは1.5cmなので、1.2/1.5=0.8回転
0.8(回転):0.015(s)=N(rpm):60(s)より、N=0.8*60/0.015=3200(rpm)
余談なので、負荷トルク計算には関係ありませんが、加速度によるGやrpmがわかります。この事例の場合、大きな加速度によるGが発生していることがわかります。また、3200rpmと言う速い回転をしていることもわかります。【余談-終わり】
さて、本題に戻ります。
ここで、求める最高角加速度ω'は台形波の斜辺となります。よって、ω'=ω/t1=〔θ*π/180*(t1+t2)〕/t1 (rad/s2)より、
ω'=334.93/0.010=33493 (rad/s2)
よって、
回転系の加速トルク:Tr=Ir*ω'=0.018*33493=602.87(g・cm)
直動系の加速トルク:Tr=Ic*ω'=0.017*33493=569.38(g・cm)
次に外的負荷(バネや摩擦など)によって生じる物体の外的
負荷トルク(=摩擦トルク)Tcを求めます。
Tc=(Fa*A*i)/2*π*n (g・cm)
ここで、Fa=Fs+W (gf)
Fa:軸方向荷重(gf)、 Fs:バネ力や摺動抵抗の外的負荷 (gf)、W:直動負荷全質量(gf)、A:モーター1回転当たりの移動量(cm)、 i:減速比(=モータギヤ/ワークギヤ)、n:効率(0.85~0.95)、Fa=Fs+W※Faはバネ力などの外力ですのでここではバネ力Fs=2000(gf)となります。また、直動負荷全質W=77+190+33=300(gf)です。
Fa=Fs+W 〔gf〕=2000+300 〔gf〕=2300 〔gf〕
Tc=(Fa*A*i)/2*π*n 〔g・cm〕=〔2300*1.5*1〕/2*π*0.8 〔g・cm〕=686.70 〔g・cm〕
外的(摩擦)負荷トルク Tc=686.70(g・cm)
ここで考えましょう!
直動系の加速トルクと外的(摩擦)負荷トルクについてです。この負荷が【加速時】と【減速時】にモータを助ける方向に働くのか、それとも悪い方向に働くのか、計算上プラスになるのかマイナスになるか?を考える必要があります。また、【上り】【下り】についても同様に考える必要があります。
上りの加速時
→加速トルクはモータに負荷を与える方向に働くので、負荷を増やす方向、つまり計算上プラスになります。バネ力や物体が重力方向に戻ろうとする力(←仮に摩擦力と表記します)による外的負荷トルクは、加速しようとしているのにブレーキをかける方向に働きます。つまり、負荷を増やす方向に働くため、計算上プラスになります。→加速:プラス、バネ力:プラス、摩擦力:プラス
上りの減速時
→減速トルクも加速トルク同様にモータに負荷を与える方向に働くので負荷を増やす方向、つまり計算上プラスになります。バネ力や物体が重力方向に戻ろうとする力(←仮に摩擦力と表記します)による外的負荷トルクは、減速しようとしているものに更にブレーキをかけて助ける方向に働きます。つまり負荷を軽減する方向に働くため、計算上、マイナスになります。→減速:プラス、バネ力:マイナス、摩擦力:マイナス
下りの加速時
→加速トルクはモータに負荷を与える方向に働くので、負荷を増やす方向、つまり計算上プラスになります。バネ力と物体が重力方向に戻ろうとする力(←仮に摩擦力と表記します)による外的負荷トルクは、加速しようとしているものに更に押す方向に助けるように働きます。つまり、負荷を軽減する方向に働くため、計算上、マイナスになります。→加速:プラス、バネ:マイナス、摩擦力:マイナス
下りの減速時
→減速トルクも加速トルク同様にモータに負荷を与える方向に働くので負荷を増やす方向、つまり計算上プラスになります。バネ力と物体が重力方向に戻ろうとする力(←仮に摩擦力と表記します)による外的負荷トルクは、減速しようとしているものに対して更に押す方向に働きます。つまり、負荷を増す方向に働くため、計算上、プラスになります。→減速:プラス、バネ:プラス、摩擦力:プラス
以上より、”上りの加速時”と”下りの減速時”がそれぞれモータに最も負荷を及ぼすことがわかりましたが、このケースの場合、バネ力を考慮すると上り時の負荷>下り時の負荷であることはわかります。
よって、最大負荷は"上り"の"加速時"に発生
ただし、厳密には上りの加速時の領域では、バネはまだ縮みだしている最中であり、バネの最大荷重領域には達していないことが推察できます。きちんとした計算が必要な場合は、加速・減速領域におけるバネのその時点での荷重にてそれぞれ計算を行う必要があり、その比較を行う必要があります。
今回は擬似的な最大負荷トルクと言う点で且つ計算を複雑化させずに分りやすくする、と言う意味で"上りの加速時"が負荷が高く、その時のバネ力が最大値に近い、と言う想定で計算します。
回転系の加速トルク Tr=602.87(g・cm)
直動系の加速トルク Tr=569.38(g・cm)
外的(摩擦)負荷トルク Tc=686.70(g・cm)
モーター負荷トルク(モーター必要トルク)Tは
T=Tr + Tc
T=(602.87+569.38)+686.70=1858.95 (g・cm)
これでモーターの負荷トルクが出ました。モーターを選定をする際は、これに安全率を考慮して選定しましょう。
最後に、バネ力の妥当性確認をしてみよう!ここで、補足です。
【直動系の外的(摩擦)負荷トルク】>【直動系の加速トルク】
Tc=686.70(g・cm) > Tr=569.38(g・cm)
と、言うことは加速度によるワークのジャンピングをバネ力によってきちんと抑えていると言うことがわかります。ジャンピングを嫌う機構であれば、このバネ力は妥当であると判断することができますね!
以上になりますが、ここまで理解できれば、一般的なメカ設計においては、それなりにで”きれるレベル”ではないでしょうか。
次回以降は、設計時において役立ちそうな計算例を随時UPしていこうと思います。
よろしければサポートお願いします。 いただいたサポートは技術者としての活動費に使わせていただきます。