
Plotclockが作りたくなりました。

前から興味があったPlotclockを作りたいと思います。材料は自宅に転がっていたArduinoUNO互換品とサーボモーターSG90(3個)を使用します。
側は中国の安っすいのを注文しました。例によっていつ来るかわからないので、配線とコードの方を進めていきます。検索すると、色々情報があって助かります。
まずは、Arduinoに、Timeのライブラリーを入れます。
まずはこちらのサイトから、Time-master.zipをダウンロードします。
https://github.com/PaulStoffregen/Time

そしたら、ArduinoIDを開き、スケッチ→ライブラリをインクルード→zip形式のライブラリをインストール
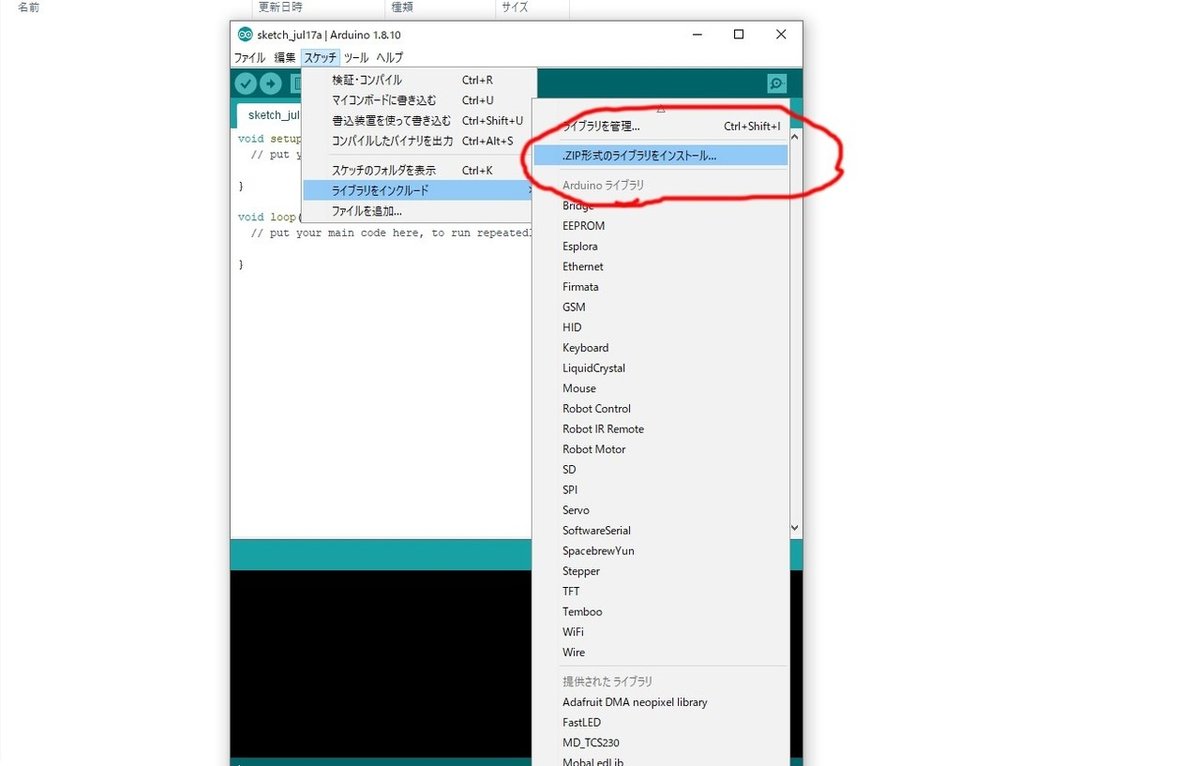
するとライブラリの中に、Timeが現れます。

そしたらこれをインクルードします。するとこうなります。

次は、Plotclockのcodeを入れます。コードはこちらものをお借りしました。
https://www.thingiverse.com/thing:248009/files
こちらから、Arduinoのcodeをダウンロードして、Timeのライブリをインクルードします。そうすとこんなcodeになります。
#include <TimeLib.h>
// Plotclock
// cc - by Johannes Heberlein 2014
// v 1.02
// thingiverse.com/joo wiki.fablab-nuernberg.de
// units: mm; microseconds; radians
// origin: bottom left of drawing surface
// time library see http://playground.arduino.cc/Code/time
// RTC library see http://playground.arduino.cc/Code/time
// or http://www.pjrc.com/teensy/td_libs_DS1307RTC.html
// Change log:
// 1.01 Release by joo at https://github.com/9a/plotclock
// 1.02 Additional features implemented by Dave:
// - added ability to calibrate servofaktor seperately for left and right servos
// - added code to support DS1307, DS1337 and DS3231 real time clock chips
// - see http://www.pjrc.com/teensy/td_libs_DS1307RTC.html for how to hook up the real time clock
// delete or mark the next line as comment if you don't need these
#define CALIBRATION // enable calibration mode
//#define REALTIMECLOCK // enable real time clock
// When in calibration mode, adjust the following factor until the servos move exactly 90 degrees
#define SERVOFAKTORLEFT 650
#define SERVOFAKTORRIGHT 650
// Zero-position of left and right servo
// When in calibration mode, adjust the NULL-values so that the servo arms are at all times parallel
// either to the X or Y axis
#define SERVOLEFTNULL 2250
#define SERVORIGHTNULL 920
#define SERVOPINLIFT 2
#define SERVOPINLEFT 3
#define SERVOPINRIGHT 4
// lift positions of lifting servo
#define LIFT0 1080 // on drawing surface
#define LIFT1 925 // between numbers
#define LIFT2 725 // going towards sweeper
// speed of liftimg arm, higher is slower
#define LIFTSPEED 1500
// length of arms
#define L1 35
#define L2 55.1
#define L3 13.2
// origin points of left and right servo
#define O1X 22
#define O1Y -25
#define O2X 47
#define O2Y -25
#include <Time.h> // see http://playground.arduino.cc/Code/time
#include <Servo.h>
#ifdef REALTIMECLOCK
// for instructions on how to hook up a real time clock,
// see here -> http://www.pjrc.com/teensy/td_libs_DS1307RTC.html
// DS1307RTC works with the DS1307, DS1337 and DS3231 real time clock chips.
// Please run the SetTime example to initialize the time on new RTC chips and begin running.
#include <Wire.h>
#include <DS1307RTC.h> // see http://playground.arduino.cc/Code/time
#endif
int servoLift = 1500;
Servo servo1; //
Servo servo2; //
Servo servo3; //
volatile double lastX = 75;
volatile double lastY = 47.5;
int last_min = 0;
void setup()
{
#ifdef REALTIMECLOCK
Serial.begin(9600);
//while (!Serial) { ; } // wait for serial port to connect. Needed for Leonardo only
// Set current time only the first to values, hh,mm are needed
tmElements_t tm;
if (RTC.read(tm))
{
setTime(tm.Hour,tm.Minute,tm.Second,tm.Day,tm.Month,tm.Year);
Serial.println("DS1307 time is set OK.");
}
else
{
if (RTC.chipPresent())
{
Serial.println("DS1307 is stopped. Please run the SetTime example to initialize the time and begin running.");
}
else
{
Serial.println("DS1307 read error! Please check the circuitry.");
}
// Set current time only the first to values, hh,mm are needed
setTime(19,38,0,0,0,0);
}
#else
// Set current time only the first to values, hh,mm are needed
setTime(19,38,0,0,0,0);
#endif
drawTo(75.2, 47);
lift(0);
servo1.attach(SERVOPINLIFT); // lifting servo
servo2.attach(SERVOPINLEFT); // left servo
servo3.attach(SERVOPINRIGHT); // right servo
delay(1000);
}
void loop()
{
#ifdef CALIBRATION
// Servohorns will have 90° between movements, parallel to x and y axis
drawTo(-3, 29.2);
delay(500);
drawTo(74.1, 28);
delay(500);
#else
int i = 0;
if (last_min != minute()) {
if (!servo1.attached()) servo1.attach(SERVOPINLIFT);
if (!servo2.attached()) servo2.attach(SERVOPINLEFT);
if (!servo3.attached()) servo3.attach(SERVOPINRIGHT);
lift(0);
hour();
while ((i+1)*10 <= hour())
{
i++;
}
number(3, 3, 111, 1);
number(5, 25, i, 0.9);
number(19, 25, (hour()-i*10), 0.9);
number(28, 25, 11, 0.9);
i=0;
while ((i+1)*10 <= minute())
{
i++;
}
number(34, 25, i, 0.9);
number(48, 25, (minute()-i*10), 0.9);
lift(2);
drawTo(74.2, 47.5);
lift(1);
last_min = minute();
servo1.detach();
servo2.detach();
servo3.detach();
}
#endif
}
// Writing numeral with bx by being the bottom left originpoint. Scale 1 equals a 20 mm high font.
// The structure follows this principle: move to first startpoint of the numeral, lift down, draw numeral, lift up
void number(float bx, float by, int num, float scale) {
switch (num) {
case 0:
drawTo(bx + 12 * scale, by + 6 * scale);
lift(0);
bogenGZS(bx + 7 * scale, by + 10 * scale, 10 * scale, -0.8, 6.7, 0.5);
lift(1);
break;
case 1:
drawTo(bx + 3 * scale, by + 15 * scale);
lift(0);
drawTo(bx + 10 * scale, by + 20 * scale);
drawTo(bx + 10 * scale, by + 0 * scale);
lift(1);
break;
case 2:
drawTo(bx + 2 * scale, by + 12 * scale);
lift(0);
bogenUZS(bx + 8 * scale, by + 14 * scale, 6 * scale, 3, -0.8, 1);
drawTo(bx + 1 * scale, by + 0 * scale);
drawTo(bx + 12 * scale, by + 0 * scale);
lift(1);
break;
case 3:
drawTo(bx + 2 * scale, by + 17 * scale);
lift(0);
bogenUZS(bx + 5 * scale, by + 15 * scale, 5 * scale, 3, -2, 1);
bogenUZS(bx + 5 * scale, by + 5 * scale, 5 * scale, 1.57, -3, 1);
lift(1);
break;
case 4:
drawTo(bx + 10 * scale, by + 0 * scale);
lift(0);
drawTo(bx + 10 * scale, by + 20 * scale);
drawTo(bx + 2 * scale, by + 6 * scale);
drawTo(bx + 12 * scale, by + 6 * scale);
lift(1);
break;
case 5:
drawTo(bx + 2 * scale, by + 5 * scale);
lift(0);
bogenGZS(bx + 5 * scale, by + 6 * scale, 6 * scale, -2.5, 2, 1);
drawTo(bx + 5 * scale, by + 20 * scale);
drawTo(bx + 12 * scale, by + 20 * scale);
lift(1);
break;
case 6:
drawTo(bx + 2 * scale, by + 10 * scale);
lift(0);
bogenUZS(bx + 7 * scale, by + 6 * scale, 6 * scale, 2, -4.4, 1);
drawTo(bx + 11 * scale, by + 20 * scale);
lift(1);
break;
case 7:
drawTo(bx + 2 * scale, by + 20 * scale);
lift(0);
drawTo(bx + 12 * scale, by + 20 * scale);
drawTo(bx + 2 * scale, by + 0);
lift(1);
break;
case 8:
drawTo(bx + 5 * scale, by + 10 * scale);
lift(0);
bogenUZS(bx + 5 * scale, by + 15 * scale, 5 * scale, 4.7, -1.6, 1);
bogenGZS(bx + 5 * scale, by + 5 * scale, 5 * scale, -4.7, 2, 1);
lift(1);
break;
case 9:
drawTo(bx + 9 * scale, by + 11 * scale);
lift(0);
bogenUZS(bx + 7 * scale, by + 15 * scale, 5 * scale, 4, -0.5, 1);
drawTo(bx + 5 * scale, by + 0);
lift(1);
break;
case 111:
lift(0);
drawTo(70, 46);
drawTo(65, 43);
drawTo(65, 49);
drawTo(5, 49);
drawTo(5, 45);
drawTo(65, 45);
drawTo(65, 40);
drawTo(5, 40);
drawTo(5, 35);
drawTo(65, 35);
drawTo(65, 30);
drawTo(5, 30);
drawTo(5, 25);
drawTo(65, 25);
drawTo(65, 20);
drawTo(5, 20);
drawTo(60, 44);
drawTo(75.2, 47);
lift(2);
break;
case 11:
drawTo(bx + 5 * scale, by + 15 * scale);
lift(0);
bogenGZS(bx + 5 * scale, by + 15 * scale, 0.1 * scale, 1, -1, 1);
lift(1);
drawTo(bx + 5 * scale, by + 5 * scale);
lift(0);
bogenGZS(bx + 5 * scale, by + 5 * scale, 0.1 * scale, 1, -1, 1);
lift(1);
break;
}
}
void lift(char lift) {
switch (lift) {
// room to optimize !
case 0: //850
if (servoLift >= LIFT0) {
while (servoLift >= LIFT0)
{
servoLift--;
servo1.writeMicroseconds(servoLift);
delayMicroseconds(LIFTSPEED);
}
}
else {
while (servoLift <= LIFT0) {
servoLift++;
servo1.writeMicroseconds(servoLift);
delayMicroseconds(LIFTSPEED);
}
}
break;
case 1: //150
if (servoLift >= LIFT1) {
while (servoLift >= LIFT1) {
servoLift--;
servo1.writeMicroseconds(servoLift);
delayMicroseconds(LIFTSPEED);
}
}
else {
while (servoLift <= LIFT1) {
servoLift++;
servo1.writeMicroseconds(servoLift);
delayMicroseconds(LIFTSPEED);
}
}
break;
case 2:
if (servoLift >= LIFT2) {
while (servoLift >= LIFT2) {
servoLift--;
servo1.writeMicroseconds(servoLift);
delayMicroseconds(LIFTSPEED);
}
}
else {
while (servoLift <= LIFT2) {
servoLift++;
servo1.writeMicroseconds(servoLift);
delayMicroseconds(LIFTSPEED);
}
}
break;
}
}
void bogenUZS(float bx, float by, float radius, int start, int ende, float sqee) {
float inkr = -0.05;
float count = 0;
do {
drawTo(sqee * radius * cos(start + count) + bx,
radius * sin(start + count) + by);
count += inkr;
}
while ((start + count) > ende);
}
void bogenGZS(float bx, float by, float radius, int start, int ende, float sqee) {
float inkr = 0.05;
float count = 0;
do {
drawTo(sqee * radius * cos(start + count) + bx,
radius * sin(start + count) + by);
count += inkr;
}
while ((start + count) <= ende);
}
void drawTo(double pX, double pY) {
double dx, dy, c;
int i;
// dx dy of new point
dx = pX - lastX;
dy = pY - lastY;
//path lenght in mm, times 4 equals 4 steps per mm
c = floor(4 * sqrt(dx * dx + dy * dy));
if (c < 1) c = 1;
for (i = 0; i <= c; i++) {
// draw line point by point
set_XY(lastX + (i * dx / c), lastY + (i * dy / c));
}
lastX = pX;
lastY = pY;
}
double return_angle(double a, double b, double c) {
// cosine rule for angle between c and a
return acos((a * a + c * c - b * b) / (2 * a * c));
}
void set_XY(double Tx, double Ty)
{
delay(1);
double dx, dy, c, a1, a2, Hx, Hy;
// calculate triangle between pen, servoLeft and arm joint
// cartesian dx/dy
dx = Tx - O1X;
dy = Ty - O1Y;
// polar lemgth (c) and angle (a1)
c = sqrt(dx * dx + dy * dy); //
a1 = atan2(dy, dx); //
a2 = return_angle(L1, L2, c);
servo2.writeMicroseconds(floor(((a2 + a1 - M_PI) * SERVOFAKTORLEFT) + SERVOLEFTNULL));
// calculate joinr arm point for triangle of the right servo arm
a2 = return_angle(L2, L1, c);
Hx = Tx + L3 * cos((a1 - a2 + 0.621) + M_PI); //36,5°
Hy = Ty + L3 * sin((a1 - a2 + 0.621) + M_PI);
// calculate triangle between pen joint, servoRight and arm joint
dx = Hx - O2X;
dy = Hy - O2Y;
c = sqrt(dx * dx + dy * dy);
a1 = atan2(dy, dx);
a2 = return_angle(L1, (L2 - L3), c);
servo3.writeMicroseconds(floor(((a1 - a2) * SERVOFAKTORRIGHT) + SERVORIGHTNULL));
}配線はこちらになります。

上のcodeを書き込むとサーボモーターが動きます。

今日はここまでです。ありがとうございました。
この記事が気に入ったらサポートをしてみませんか?