過去に作った機体の振り返り

はじめに
2019年度からロボカップジュニアに参加してきて、今までたくさんの機体を作成してきたので、ブログにまとめたいと思います。作る機体の数が多くなるにつれて技術力が上がっていくのが写真を見て分かると思うので、ブログにまとめるのが楽しみです。
2019年度
ノード大会
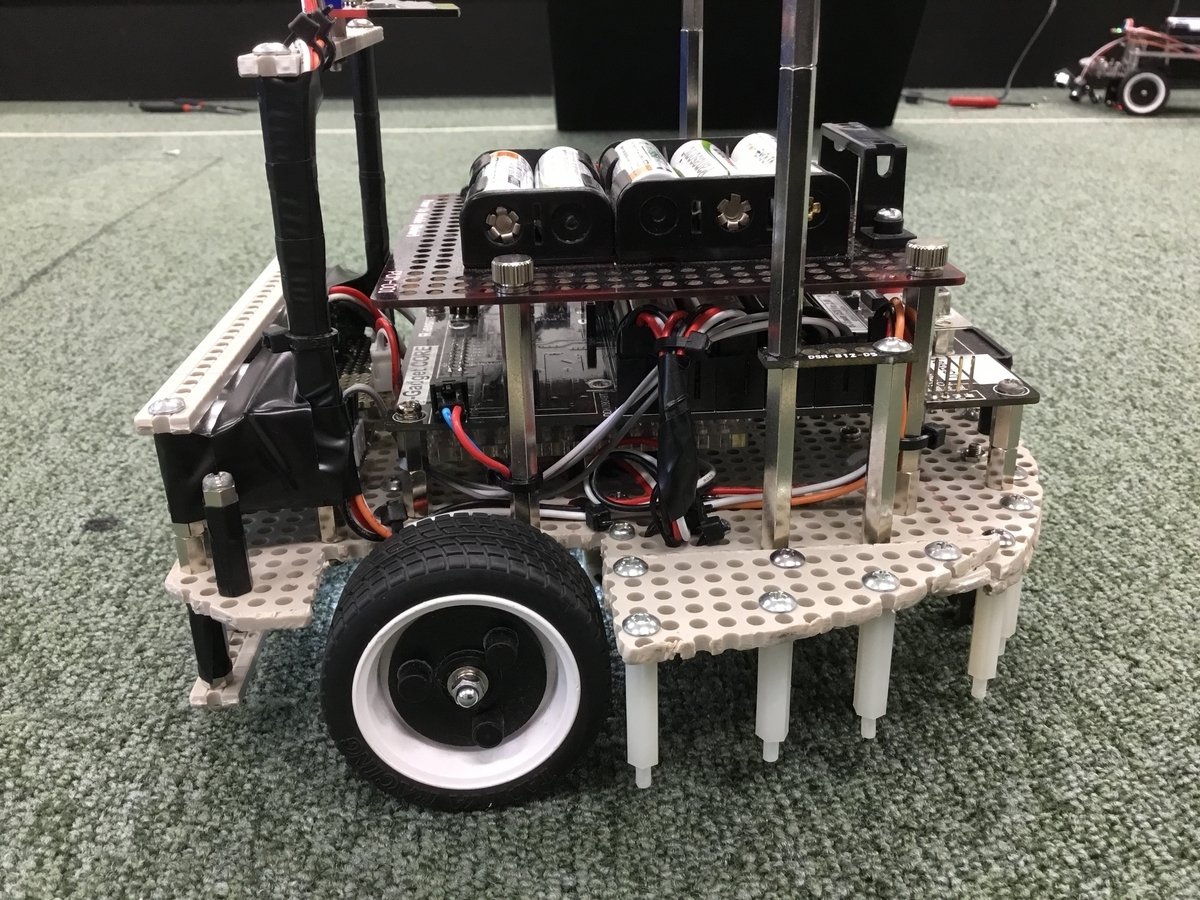
ビギナーズに初めて出場した時のロボットです。キットで買ったe-Gadget-RBをタミヤのユニバーサルプレートで改造したものです。補足エリアがなくて制御に困っていた記憶があります。前面にボールセンサが2段重ねになっている理由は思い出せません...

ブロック大会
ノード大会での反省を活かして捕捉エリアと捕捉センサを搭載しました。ハンドルのアルミは家にあったものをドリルとヤスリで頑張っていた記憶があります。デザイン的に結構気に入っているロボットです。しかし、ハードは良かったのですが、プログラムが不調であまり勝てなかったです。


BIWAKO OPEN
2020年度にライトウェイトに出場するための練習に簡単に作った3輪ロボットです。赤外線距離センサ以外は全部ダイセン製です。付いているファンはカッコよかったので廃材から取って取り付けました。シャーシは百均のまな板を糸鋸で切っていたので、めっちゃ大変だった記憶があります。プログラムも調子が乗っていていい動きができていました。

2020年度
ノード大会
この頃からFusion360とAutoCADを使って設計を始めました。また、ダイセン製からSTM32に乗り換えてボールセンサ、ラインセンサも素子を買って自作しました。唯一ダイセンモーターだけはコスト面の問題で卒業できていません。
右の写真の機体は適当にまな板を切ってダイセン製のものを載っけただけです。


ブロック大会
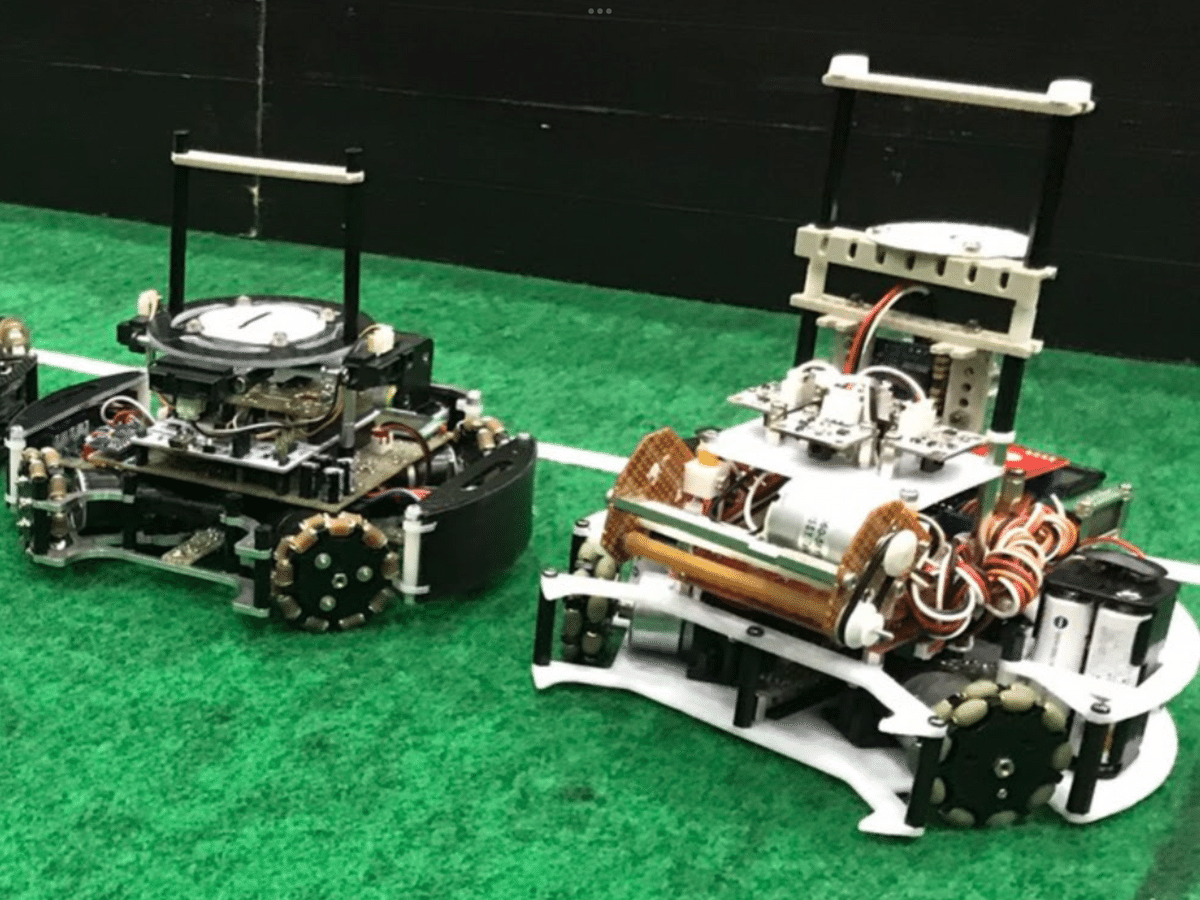
アタッカー(左)には前と左右にPSD方式の赤外線センサを搭載しました。左右のセンサで壁との距離を測って前のセンサで敵を認識して、敵よけっぽいことをしていました。
キーパー(右)にはどドリブラーが新たに搭載され、敵に攻められたときはプッシングを取りやすく、チャンスがあればローターを反転させて相手のゴールまでボールをキックしていました。
全体的に順調に動いていましたが、LEGENDにはボロ負けにされてしまいました。
2021年度
ノード大会
アタッカー(左)は、なぜか昨年のブロック大会まで搭載されていた距離センサが取り外されて左右に赤色LEDが搭載されています、なぜでしょう。思い出せません。でもプログラムの技術は高くなってきていて、距離センサがなくても自己位置推測をしてゴールにロボットが向くようにしていました。
キーパー(右)は相方がArduinoを使った新機体を製作中だったので昨年のものをそのまま出しました。

ブロック大会
アタッカー(左)には昨年度と同様に前と左右にPSD方式の赤外線センサを搭載しています。ドリブラーも追加されているのでうまく敵よけをしてドリブラーのローター反転シュートも活用し、得点を決めることができました。
キーパー(右)は相方が作っていましたが、大会までに完成が難しかったので1週間で作り上げました。STM32 F303K8を初めて使いましたが、PWMがうまく出力されないピンがいくつかあり、調整が難しかったです。また、ジャイロのライブラリの中にある角速度計測上限を引き上げるのを忘れており、強い衝撃があると傾いてしまっていました。まさに1週間クオリティでしたね。
LEGEND戦ではお互いジャイロが狂いまくる症状がありましたが、ギリギリ勝つことができ優勝することができました。憧れの先輩に勝つことができて当時はめっちゃ喜んでいました。

全国大会
初めての全国大会だったのでモチベーションがめっちゃ高くて、どんどんロボットが進化していました。
アタッカー(左)のハード面の大きな変更は、赤外線距離センサから超音波センサに変更したくらいです。主にプログラムを頑張っていました。動画も載せておきます。
キッカー(左)は相方のArduinoを使ったロボットが完成しました。
こんなに順調だったのに、まさかのコロナの流行で全国大会がオンライン開催となってしまいました...それでもインタビューや動画で全国7位を取ることができたので良かったです。


RCAP
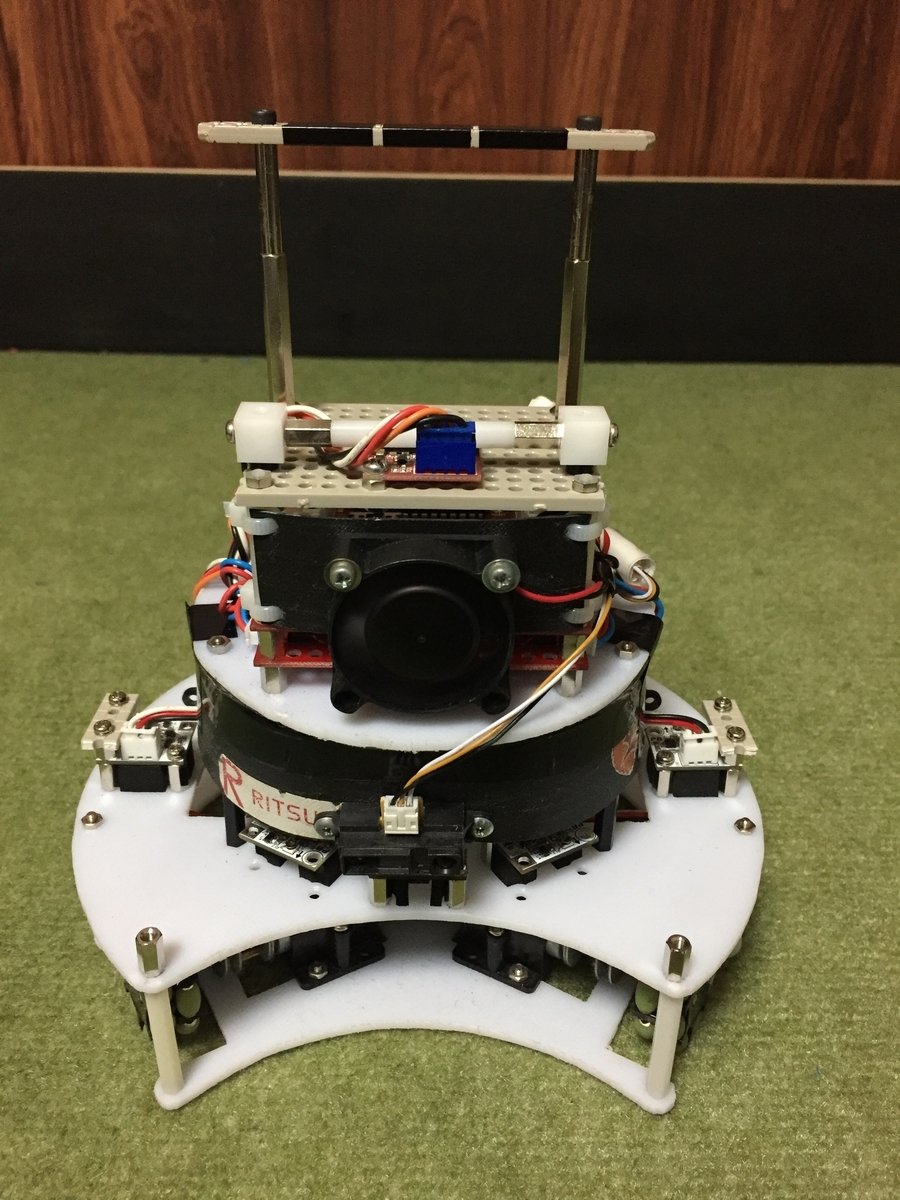
キーパーは変更点がありませんでしたが、アタッカーはガラッと変わりました。前機体のシャーシはA2017アルミニウムでしたが、全て3Dプリンタ製に変更しました。T3のアルミからの変更だったのでかなりの軽量化になりました。さらに、前方にカメラも追加されてゴールの方向を向いたままの姿勢制御が可能になり、中立点からのゴール確率が格段に上がりました。

2022年度
ノード大会
RCAPと同じ機体で出ていました。
ブロック大会
RCAPと同じ機体で出ていましたが、大会当日にジャイロセンサが壊れました。まさかの予備を持っておらずカメラだけで姿勢制御をすることになってしまったので、ひどい動きでした。でもなんとか決勝までは進出することができて全国大会へ出場することもできました。今後の大会で予備部品をたらふく持っていくための良い経験だったと思います。
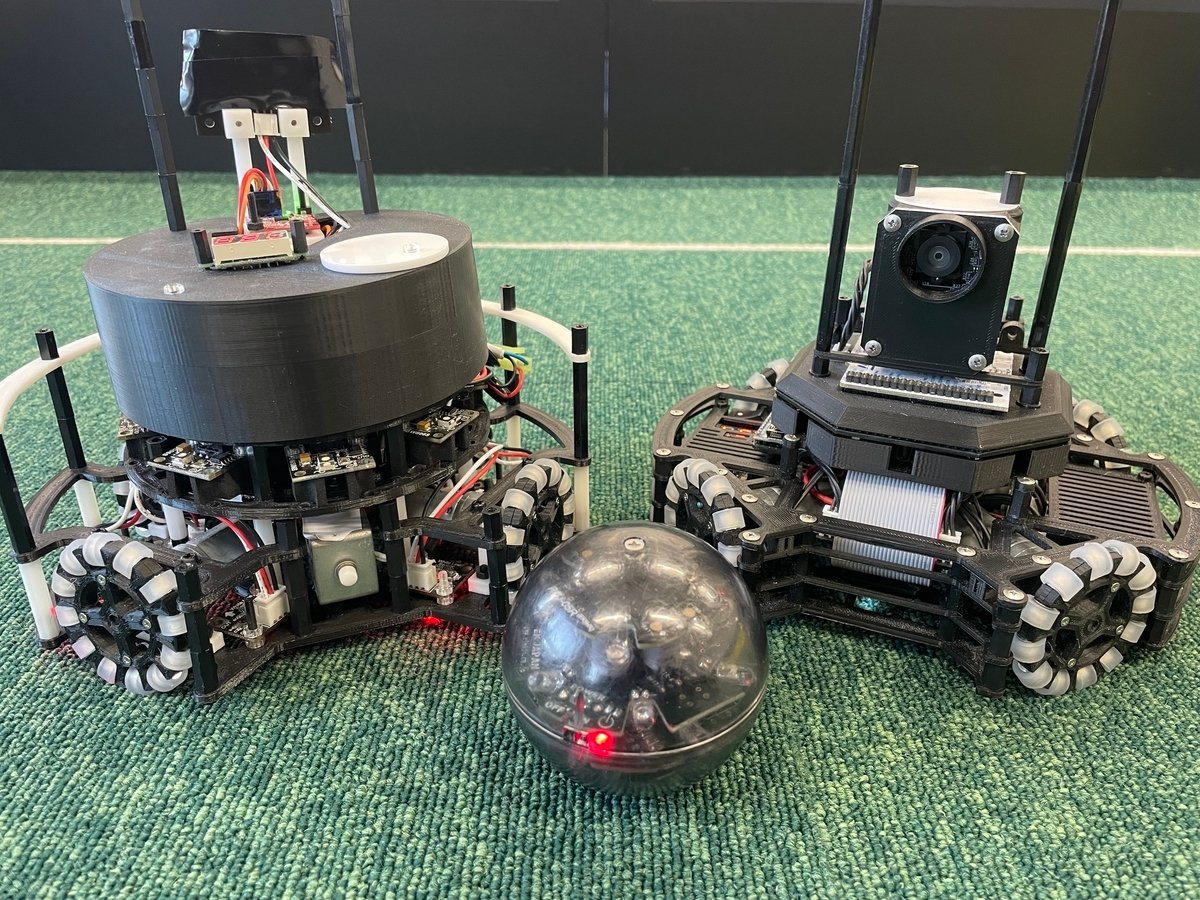
全国大会
両端のロボットです。(真ん中はAEGISの機体)
トップマーカーが2色に光るくらいしか機能がないロボットです。
キーパー(左)は車高が低くなってコンパクトになっています。

開発を諦めた機体
ライトウェイトでダブルドリブラーをしようと意気込んで作っていましたが、問題が山積みで結局モチベーションが続かずに開発を諦めた機体です。動きはしませんが、デザインは結構気に入っています。

2023年度
ノード大会
アタッカー(左)はカメラ(pixy2.1)を搭載しており、初めての3台のマイコンでの制御をしたロボットです。ジャイロセンサ用、カメラ用にArduino Nano、メイン処理用にNucleo F446REを搭載しています。プログラミングもだいぶできるようになっておりかなり良い動きをしていました。
キーパー(右)は旧AEGISの機体を流用していました。

ブロック大会
アタッカー(右)は特に変更点はありませんでした。プログラムの微調整をしたくらいです。
キーパー(左)はモーターを秋月電子に売っているIG22のものに変更しバッテリーも8.4vのニッケル水素バッテリーに変更しました。
試合の結果としては3位に終わってしまい、とても悔しい思いをしていたので全国大会に向けてのモチベーションが過去最高に上がりました。
全国大会
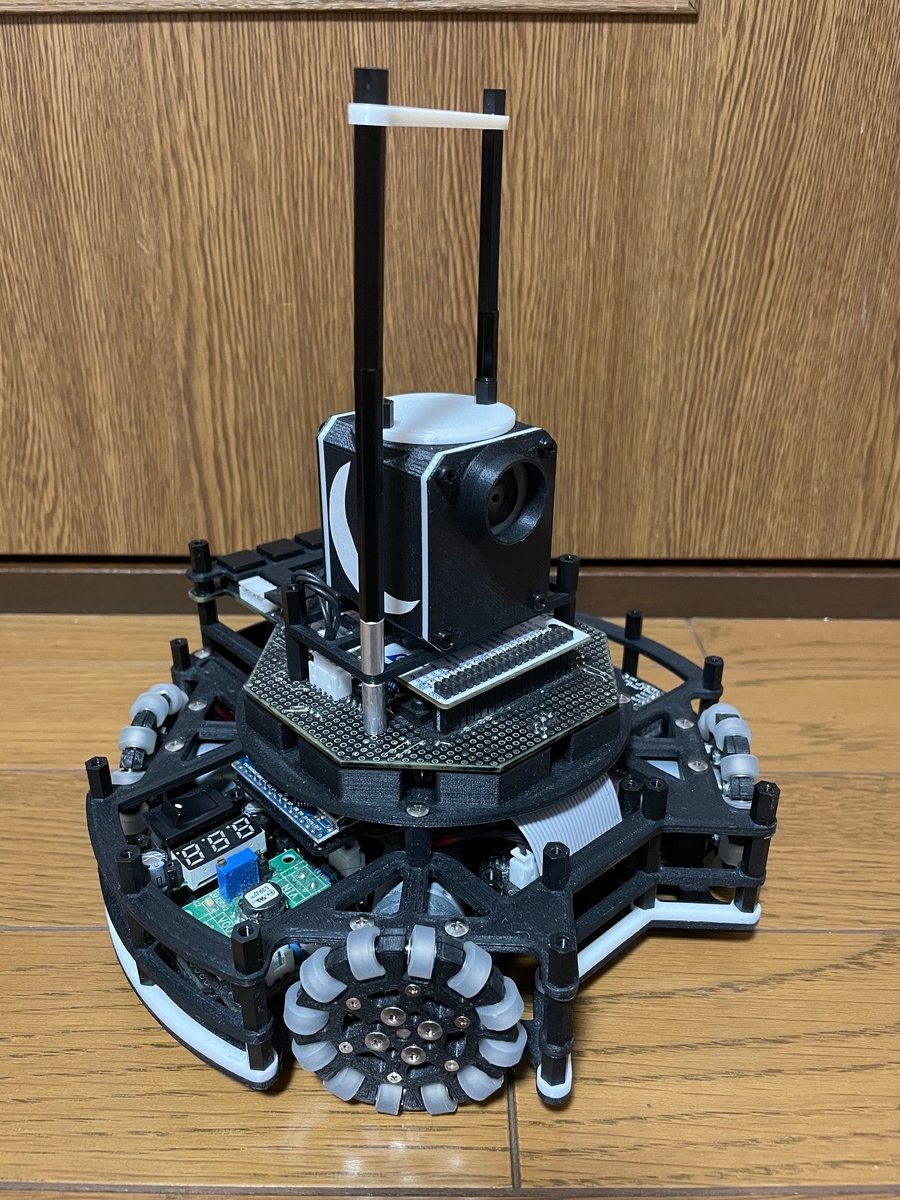
アタッカーとキーパーのハードウェアはほとんど統一して部品交換が行えるようにしました。ブロック大会が終わってすぐに中国の基板メーカーであるJLCPCBさんにスポンサーになってもらうことができ、ユニバーサル基板からプリント基板に移行しました。機体の設計の自由度があがり、4輪・ドリブラー・カメラを使った戦略でボールの軌道が曲がるマカオシュートも打つことができ、大きな得点源になりました。
このロボットの特徴は3Dプリンタを活用した立体的で合理的な設計です。かなり肉抜きをしていましたが、制作から試合終了まで一度も部品が壊れることはありませんでした。
試合結果としては全体6位・優秀デザイン賞・日本ロボット学会賞で世界大会には行けませんでしたが、満足のいく結果でした。

スポンサー紹介
JLCPCB様にスポンサーになっていただいています。一昔前までは非常に高価だったプリント基板の製造サービスが最安$2から発注することができます。新規ユーザーには$54クーポンも貰うことができます。
↓公式サイト
PCB Prototype & PCB Fabrication Manufacturer - JLCPCB
↓発注方法の動画
JLCPCBへの発注方法 - YouTube
この記事が気に入ったらサポートをしてみませんか?