多摩川精機のステッピングモーターを3Dプリンタに搭載してみるの巻

デジットさん(共立)で販売中のステッピングモーターを3Dプリンタに搭載する手順をまとめていきます、今回はTronxy D01を題材としました。
D01はボーデン型であり、リトラクション距離などが大きく、材料のロードも面倒なのでダイレクト化のメリットが何点かある。
今回のD01ダイレクト化はフィラメント切れセンサを無視するため、フィラメントセンサを使う場合はセンサの移植などしてください。
付属している標準的なNema17モータやTITANを用いても十分ダイレクト化が可能だが、ダイレクトドライブの軽量化に最適なモータなのである。
デジットさんで単品でも販売されているが、他の3Dプリンタにも適しているので、まとめ買いしてはいかがでしょうか?
1.8degモータ より分解能が倍ある為、ファームウェアの書き換えも行わないと正しいE値で造形できない。
また、
・タップが立っているねじ穴が2か所しかない
固定方法は工夫する必要がある。
作業工程は大きく分けて
・モータマウント用部品の3Dプリント・取り付け
・モータ・エクストルーダの取付
・モータ用の配線(線の延長とコネクタ付け)
・ファームウェアの書き換え
・モータドライバの電流調整
がある。
ファームウェアの書き換えとドライバの電流調整は重要な項目である。
作業に関してショート・装置の故障は全て自己責任です。
電子工作類の経験がある方が行って下さい。
また D01は 製品のバージョンが2タイプあり、今回行うのは
・ヘッド部分にコネクタが無い
・X軸の原点スイッチが”赤くない”
・後部タイタンエクストルーダにフラットケーブルがつながっている
タイプ
です。基本的な作業内容は変わりませんが、配線類で作業内容が少し変わると思いますが、ご了承ください。
必要なものは
・工具類(はんだごて・XHコネクタの圧着か可能な工具・セラミックマイナスドライバ・六角レンチなど)
・多摩川精機 バイポーラステッピングモータ TS3166N913
・エクストルーダ(交換する場合は BMGなど準備してください)
・長めのM3ねじ とナイロンナット
・PTFEチューブ 適量
・XH コネクタ 4PIN コネクタ オス×2 メス×1
・ 電線 4芯 100cm くらい
・熱収縮チューブ
・長さ50mmくらいのM3のねじ
事前準備 (モータコネクタ改造・圧着)
ステッピングモータ TS3166N913のコネクタをXHコネクタに変える。

いらない線は切り落してもよいですが、
切り落としたらショート防止の為に熱収縮チューブなどで処理してください
モータ・エクストルーダマウントの3Dプリント
今回はエクストルーダ部分はBondtechのBMGのクローン品を用いる
TITANでも十分機能は果たせるので好みで選んで頂きたい。
材料は基本的にはどんなものでも可能であるが、モータの発熱などを考慮すると、耐熱温度が高めの材料が望ましい(PLAよりもPETGやABSの方がまだ良い)
プリントが完了したら、ヘッド部分を外してプリント品を取り付ける。
・X軸のリニアガイドと板金がつながっている部分を六角レンチで外す

・プリント品を取り付けて締め付ける。

・PTFEチューブを長さに合わせてカットと差し込み。

・後ろについているねじを外して、 長めのM3ネジで共締めして固定(50くらい必要)+ナイロンナットで固定。

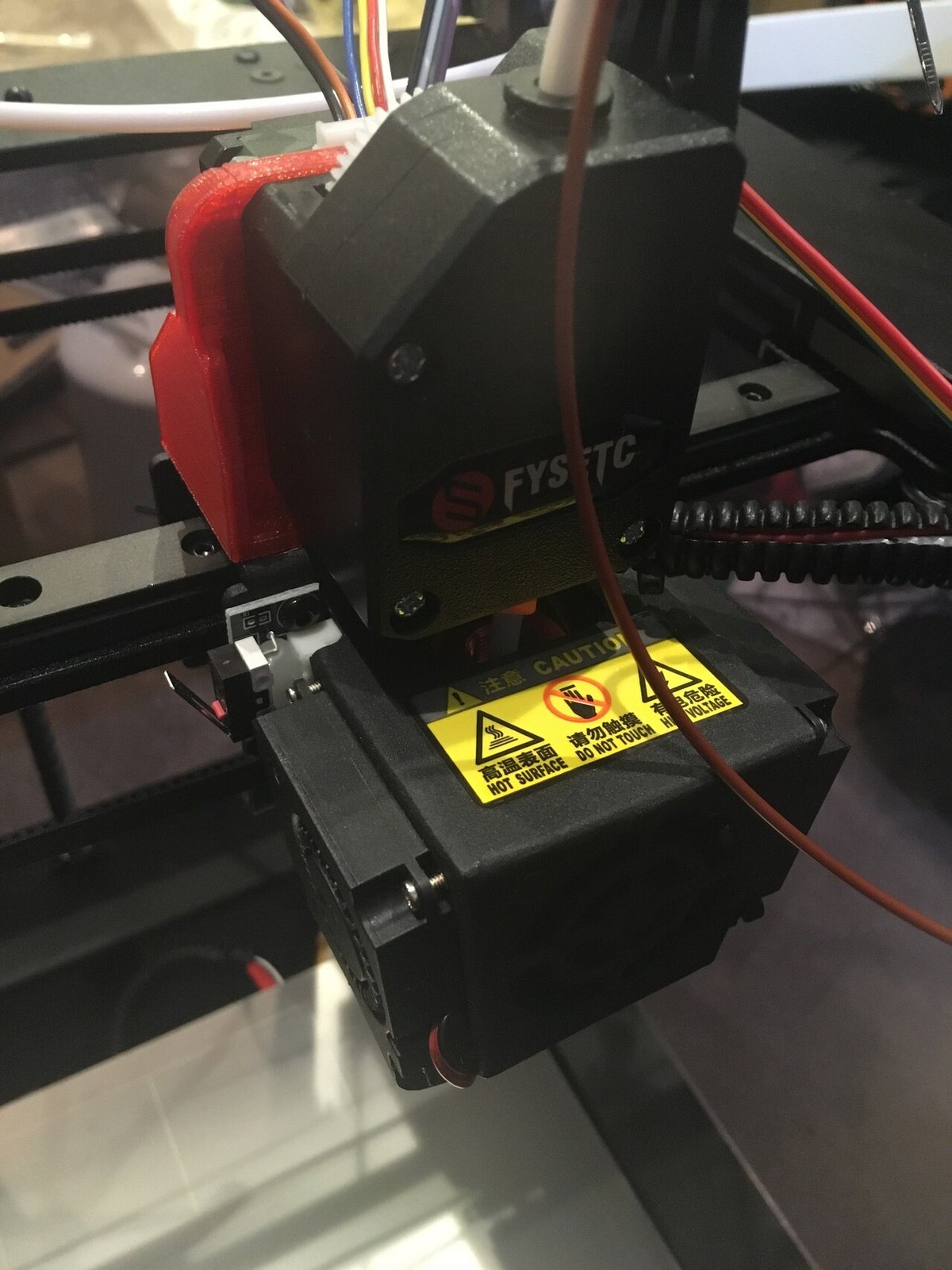
ヘッド回りはこれでいったん完了。
配線作業
エクストルーダが取り付けられたら、配線に移る。

本体後部のモータ近くにある黒いボックスを取り外して、ふたを開ける

E1 MOTORと書かれているコネクタを外し、延長ケーブルを着ける準備をする。配線図は下図のように
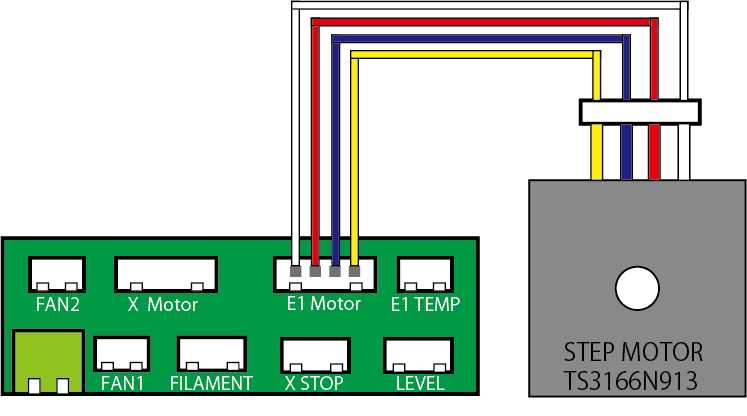
4芯のケーブルに端子を圧着する。
長さは、ヘッドに向かっているケーブル類+10cmくらい

ケーブルを結束バンドなどで固定してモータと基板を接続したら完了
ここまでで ハードウェアの改造は終了次にソフトに移る。
ファームウェアの書き換え
Tronxy で動作しているファームウェアは 中華 低価格DLPのボード・ソフトウェアでおなじみに CHITU ファームウェアというものだ。
ファームウェア変更の仕組みとしては、GCODEデータを編集し、microSDカードに書き込み、本体に差し込んで更新させる。
ダウンロードしたZIPファイルから
D01-M_V1.4.1.gcode というファイルを探す

ファイルをそのままメモ帳などでも開く事ができるが、中国語で説明文が書かれている為、文字化けします。notepad++などを使って開くことをお勧めします。

元ファイルの75行目あたりの、M8011で始まる部分を書き換える。
モータのSTEP数が倍になったので、単純に半分にすればよいが、誤差があったため、修正した値を記載します。
// デフォルト
M8011 S0.0013085
// モータ換装時(BMG Clone)
M8011 S0.00058887STEP/ mmの調整が必要な場合は以下から
そのほかにも
//Marlinのjarkに相当するところ
M8007 I40
//XY 最大速度
M8012 I150
//XY軸の 原点復帰速度
M8015 S50
//ブートロゴの持続時間、最小100ミリ秒、最大6000ミリ秒
M8085 I100
//モータの回転方向 Eが逆になった場合はこれを変えてください
M8005 I-1 ( 1 or -1 )などがあり,書き換えをして色々遊べます。
印刷速度やホーミング速度・起動画面の時間などをいじれます。
出来上がったデータをSDカードに移して、本体にさします。



アップデートかけたいデータを選択してプリントを行うと、ファイルが読み込まれてアップデートが進みます。
ビープ音が鳴って、上の画面が出たら完了。
再起動をしてください。
一応入っているGCODEでテスト造形などして確認してみてください。
押出がおかしい場合はファームウェアの書きかえを見直してみてください。

Vref値を調整する
モータを換装すると、一般的なNEMA17よりも小さく、モータの発熱がひどい。基板を開いて、抵抗をいじることで、発熱を抑制する。
本来であれば電圧測定して調整するのが望ましいですが、今回は計測部分が特定できませんでした。
見つけた方はコメントなどでお教えください。
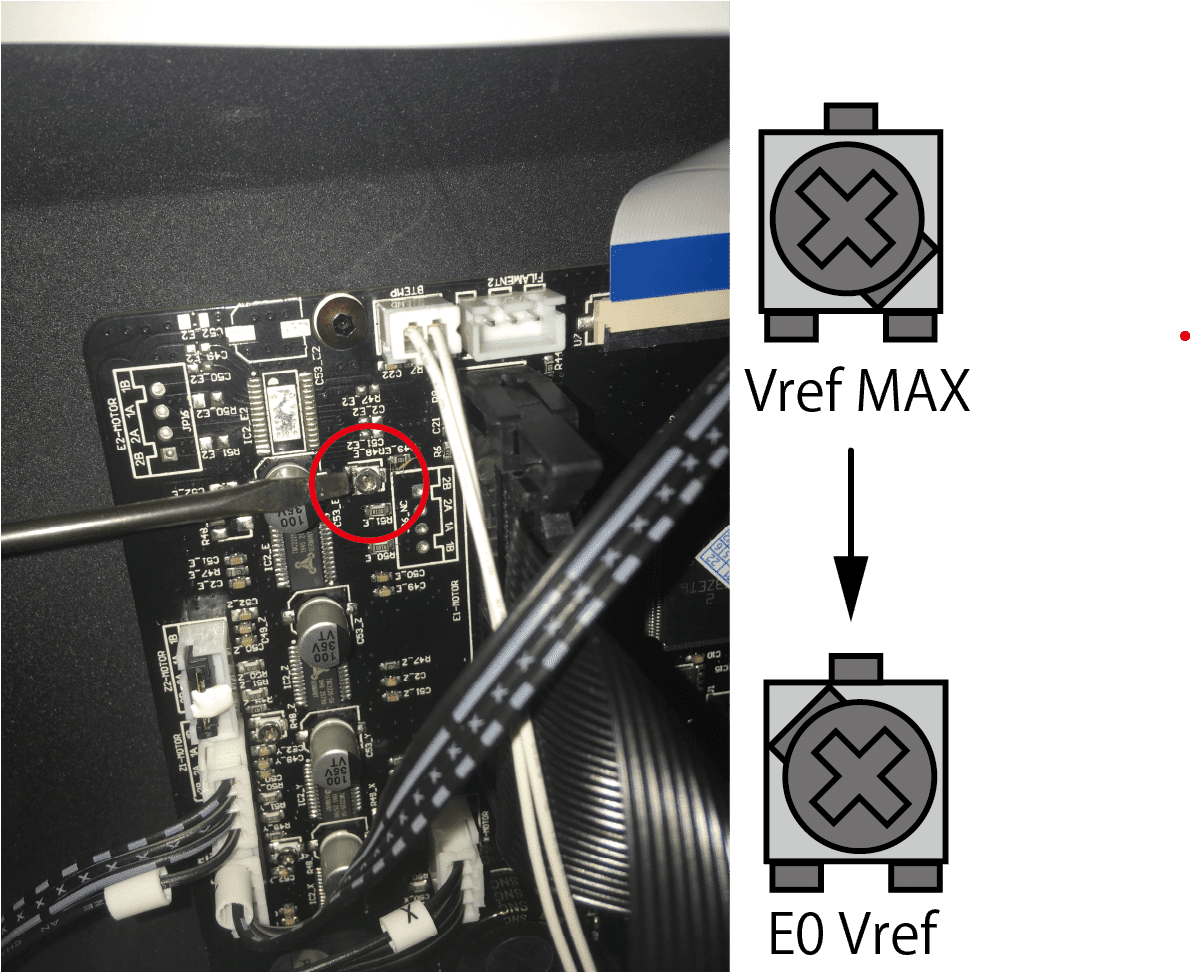
赤丸のところが E0 (このボードではE1)のVrefだと思われる。
デフォルトはMAXになっているはずなので、セラミックマイナスドライバーなどで 図のあたりまで下げました。
セラミックマイナスドライバーがない場合は小さなドライバーでも代用可能ですが、必ず電源を切ってから操作して下さい。
誤って基板に触れるとショートし故障の原因になる場合があります。
Marlin化
Marlin化して試したい方は以下からどうぞ。基本的な作業はファームウェアを書き換えた後に 必要箇所を変えるだけです。
この記事が気に入ったらサポートをしてみませんか?