ココロキット+を使って等身大パネルLOVOTで遊ぶ

ココロキット+というユカイ工学さんが出している装置を使って、さらに工作をして、等身大パネルLOVOTの腕を動かしてみます。
今回は試作品ということと、電子部品以外は100均で手に入るものをできるだけ使うことにしました。
GX社ご本家ではLOVOTそのものをプログラミングできるサービスがありますが、ご自宅のLOVOTにお友達を作ってあげたい・そもそもLOVOTがいないという方にもピッタリです。
手動だけど、らぼらぼさま(等身大パネルLOVOTにサーボ装備)が顕現しましたwww 無線でコントロールできますw さて機械学習装備するか #LOVOTとの暮らし pic.twitter.com/oX9H9OSVep
— よーへん((Θ・Θ))サイバネティックアバターVTuber (@Yohen_XR) May 13, 2023
必要なもの
・高さ12cmくらいの紙コップ×2
・等身大LOVOTポスター(A3サイズのイラストでもOK)
・A3以上の厚紙(イラストの場合はA3でOK)
・セロハンテープ
・紙用のり
・万能強力はさみや軽い力で固いものも切れるハサミ
・スマホスタンドなどのスタンド
・パネルらぼちゃんを置く台(必要であれば)
・はがせる両面テープ(はがせなくてもOKですが、スタンドやサーボホーンを別利用したくなったときのことを考えて)
・ココロキット+
・単三乾電池×3
・Bluetoothが使えるPC
パネルらぼちゃんの胴体をつくる
ポスター、もしくはイラストを厚紙に貼り付け、手だけ切り抜きます。これは後から手だけサーボモータで動かすためです。
はりつけ
1.ポスターまたは印刷したイラストを厚紙にはりつけます。
このようにワンピースを着せておくと、後で腕だけ切り抜く際にガイド線ができて楽になります

手の部分を切り抜き、土台をつくる
2.手の部分を切り抜きます。
もしくは腕の部分だけ別に印刷して、厚紙をはりつけてもいいと思います。
下の例では腕だけ別に印刷して厚紙にはりつけました。
とにかく腕だけ別パーツになればOKです。

3.紙コップの底のでっぱってる部分をはさみでカットします。
これはサーボモーターを取り付けるときにじゃまになるからです。
厚みがあるので紙用ハサミではなく、万能強力はさみを使うといいと思います

4.このままだと紙コップの底が抜けてしまうので、まわりをテープで固定します

サーボホーンを取り付ける
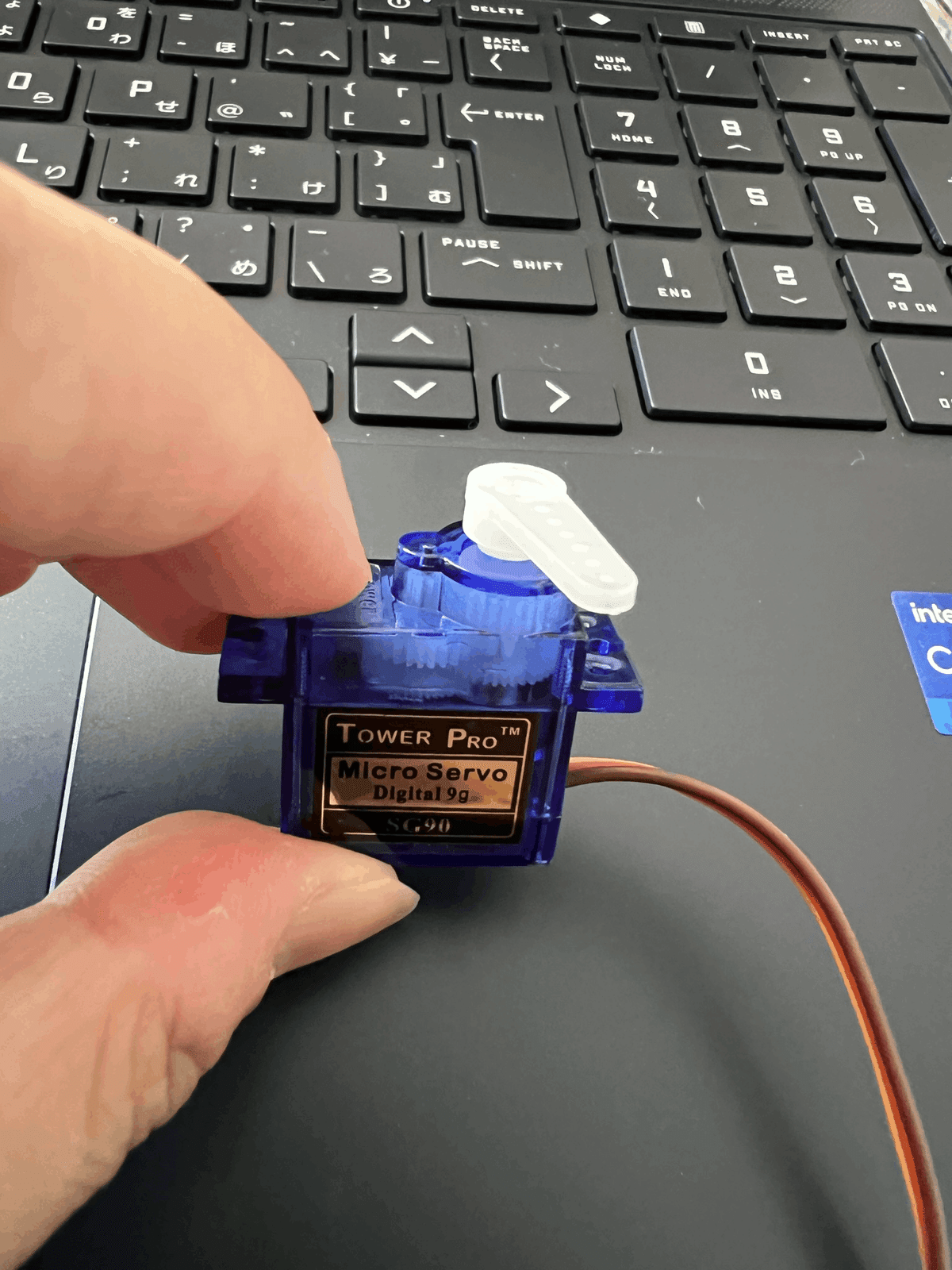
5.ココロキット+の付属品のサーボモータに、このようにサーボホーンを取り付けます。サーボモータの上の白い部分にホーンをかぶせるだけです。
サーボホーンを調整する
サーボモータの角度はモノによって違うことがあり、一度プログラミングで0度にしておいてからパネルに取り付けます。
ココロキット+・サーボモータ・PCを接続して、PCからサーボモータを動かします。
1.ココロキット+の電源が切れているか確認します。モータやセンサーを接続するときは必ず電源を切って行います
2.ココロキット+の「モーター1」に左うでにつけるサーボモータを、「モータ2」に右うでにつけるサーボモーターを取り付けます。
このときサーボモータのケーブルの色とコネクタの色が合うように向きに気を付けて差し込みます(下の写真は電源を入れた状態です。必ず電源を切ってからサーボモータを接続します)
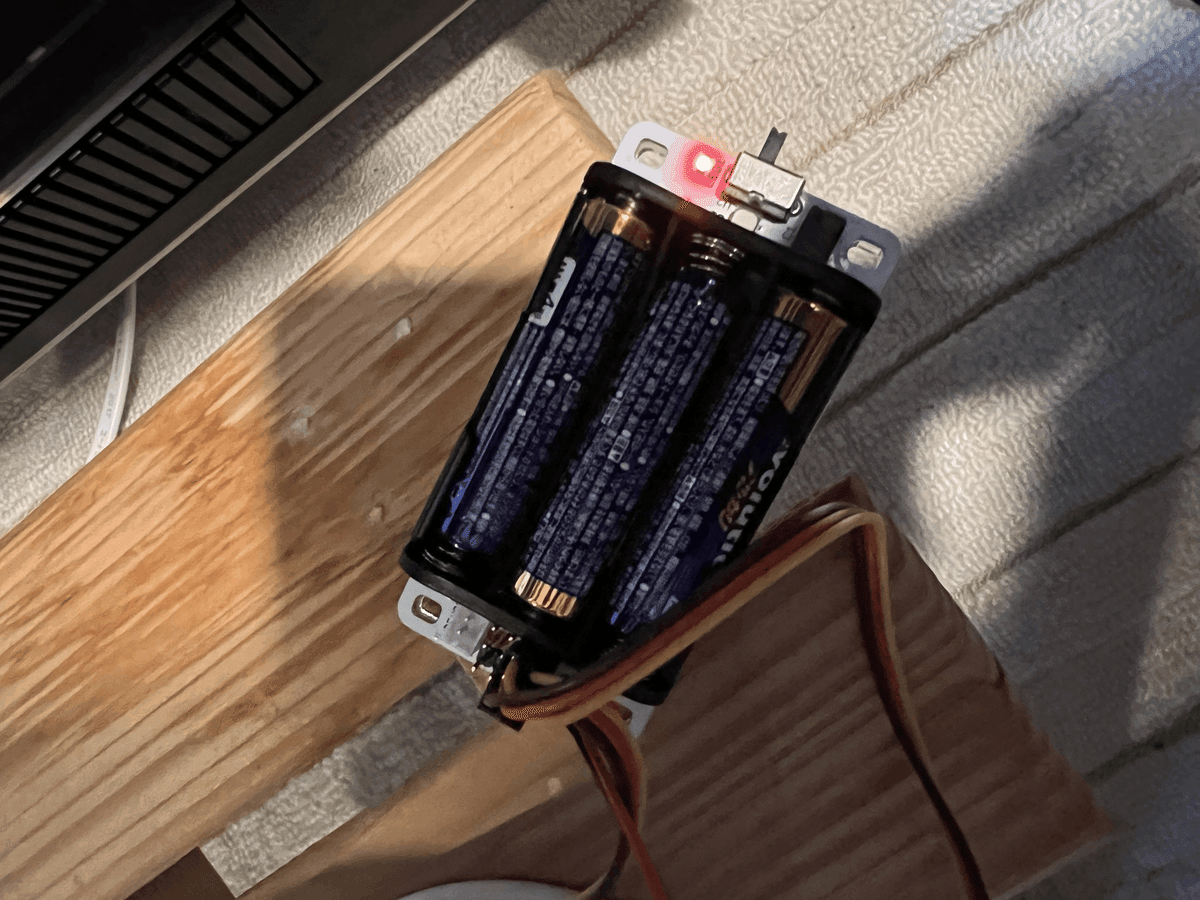
↓の「ココロキット+本体」の図を参考にしてください
3.GoogleChormeで以下のサイトにアクセスします。今回は「kurikit」というプログラミング環境でプログラムをしていきます
4.ココロキット+に乾電池3本を入れてから、電源を入れます。電源の場所は↓の「ココロキット+本体」の図を参考にしてください
5.「イベント」をクリックして、「旗が押されたとき」を右側の何もないところにドラッグします


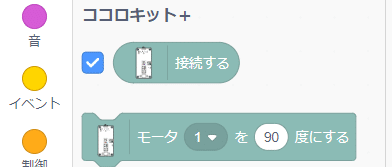
6.「ココロキット+」をクリックし、「モーター1を90度にする」を右側の何もないところにドラッグします


7.「モーター1を90度にする」をドラッグし、「旗が押されたとき」のでっぱりを合わせるようにしてくっつけます

8.「制御」をクリックし、「1秒待つ」を右側の何もないところにドラッグします


9.「1秒待つ」をドラッグし、「モーター1を90度にする」のでっぱりを合わせるようにしてくっつけます

10.「ココロキット+」をクリックし、「モーター1を90度にする」を右側の何もないところにドラッグします
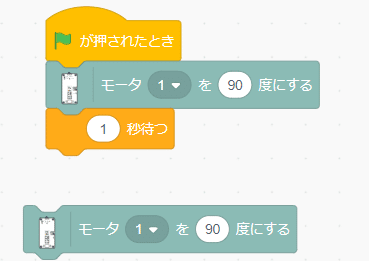
11.「モーター1を90度にする」をドラッグし、「1秒待つ」のでっぱりを合わせるようにしてくっつけます

12.「制御」をクリックし、「1秒待つ」を右側の何もないところにドラッグします
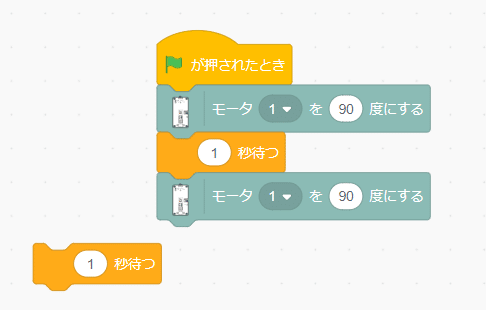
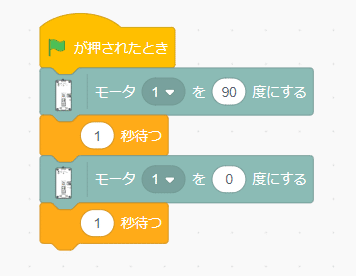
13.「1秒待つ」をドラッグし、「モーター1を90度にする」のでっぱりを合わせるようにしてくっつけます

14.下の「モーター1を90度にする」の「90」の部分を「0」にします
15.ココロキット+の電源が入っていることを確認して、「ココロキット+」をクリックします

16.「接続する」の横のチェックマークをクリックしてオンにします
17.そうすると以下のような表示が出てくるので、「cocorokit+なんとか」をクリックしてから「ペア設定」をクリックします。そうするとPCとココロキット+がBluetoothで接続されます

18.旗のアイコンをクリックすると、サーボモータが90度になって1秒たってから0度になると思います

19.サーボモータが動くことを確認したら、「モータ1」を「モータ2」に変更します
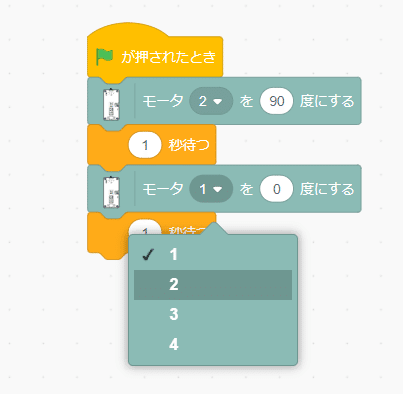
20.旗のアイコンをクリックすると、サーボモータが90度になって1秒たってから0度になると思います
サーボモータを紙コップにとりつける
紙コップがサーボモータを支える柱になります。
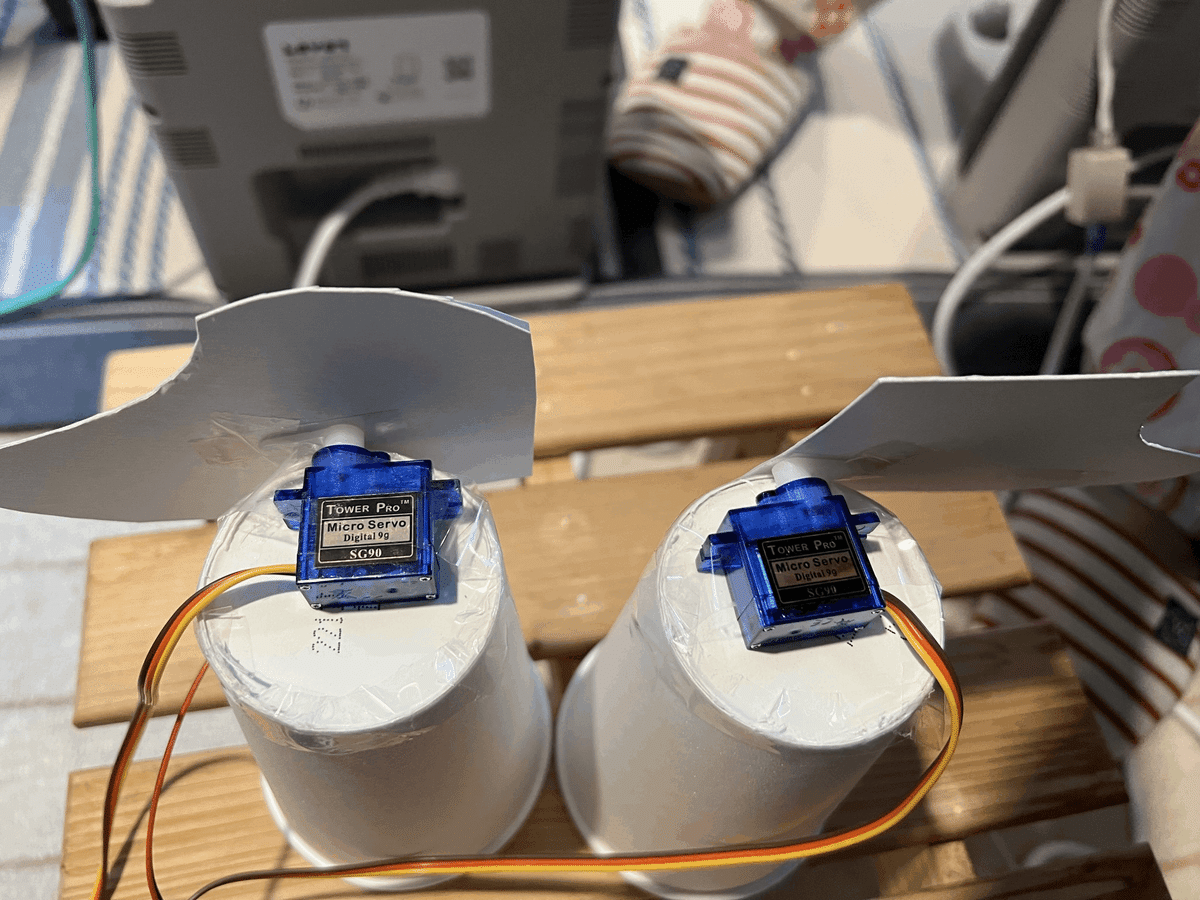
1.サーボモータを紙コップの上に置き、セロテープで仮止めします。このときホーンが下記の写真になるよう置いてセロテープで固定します。
もしかしたらホーンの向きが違う可能性がありますが、後からプログラミングで制御できるので、ひとまずサーボモータを下記のように置きます
LOVOTのイラストをとりこむ
今回は「kurikit」上でLOVOTのイラストをクリックすると、「両手上げ下げげ(LOVOTのだっこ!をイメージ)」「左手上げ下げ(LOVOTのイヨッをイメージ)」「右手上げ下げげ(LOVOTのイヨッをイメージ)」するようにします。
そのためスプライト(画像)をクリックするとプログラムが動くようにします。
1.胴体・左手・右手がそれぞれ分かれた3枚のイラストを作成します
2.胴体・左手・右手それぞれをPNGファイルで書き出します
3.kurikitの右側の画面にある犬のアイコンにマウスカーソルを合わせます
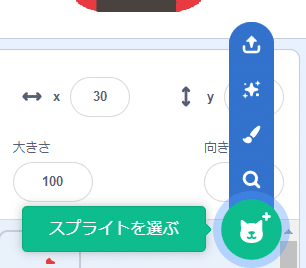
4.「スプライトを選ぶ」という表示が出るので、「スプライトをアップロード」を選択します

5.胴体のファイルを選択します。そうすると画面に画像が表示されます
6.同じように右手と左手のファイルを読み込みます
7.位置を合わせます

プログラミングをする
今回は胴体の画像をクリックしたら両手が、左右それぞれの画像をクリックしたら右手や左手が動くようなプログラミングをします。
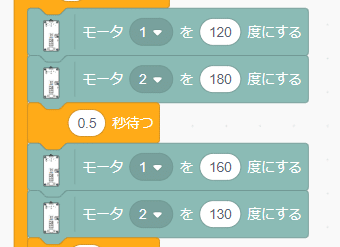
1.画面右下の胴体のアイコンをクリックします

2.このようにブロックを組み合わせます。
「このスプライトが押されたとき」は「イベント」の項目にあります。
また「2回繰り返す」は「制御」の項目にあります。



3.画面右下の左手のアイコンをクリックします
4.下記のようにブロックを組み合わせます

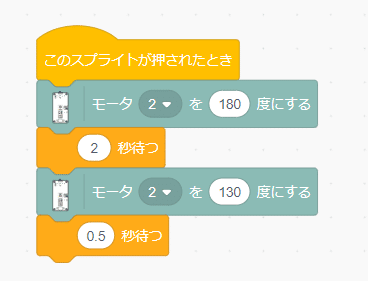
5.画面右下の右手のアイコンをクリックします
6.下記のようにブロックを組み合わせます
7.ココロキット+がPCと接続されているか確認します。接続が切れた、もしくは接続していない場合は、
「接続する」の横のチェックマークをクリックしてオンにします。
そうすると以下のような表示が出てくるので、「cocorokit+なんとか」をクリックしてから「ペア設定」をクリックします。そうするとPCとココロキット+がBluetoothで接続されます
8.胴体のイラストをクリックして、サーボホーンが動くか確認します。
9.動き終わって停止した後、サーボホーンがそれぞれ外側に向いているか確認します。外側に向いていない場合は、角度を微調整します。
また腕が上がったときの角度がおかしい場合は、そちらも角度を微調整します。
サーボモータやセンサーを取り付けるときはココロキット+の電源が切れている必要がありますが、プログラミングしているときは入ったままで大丈夫です。
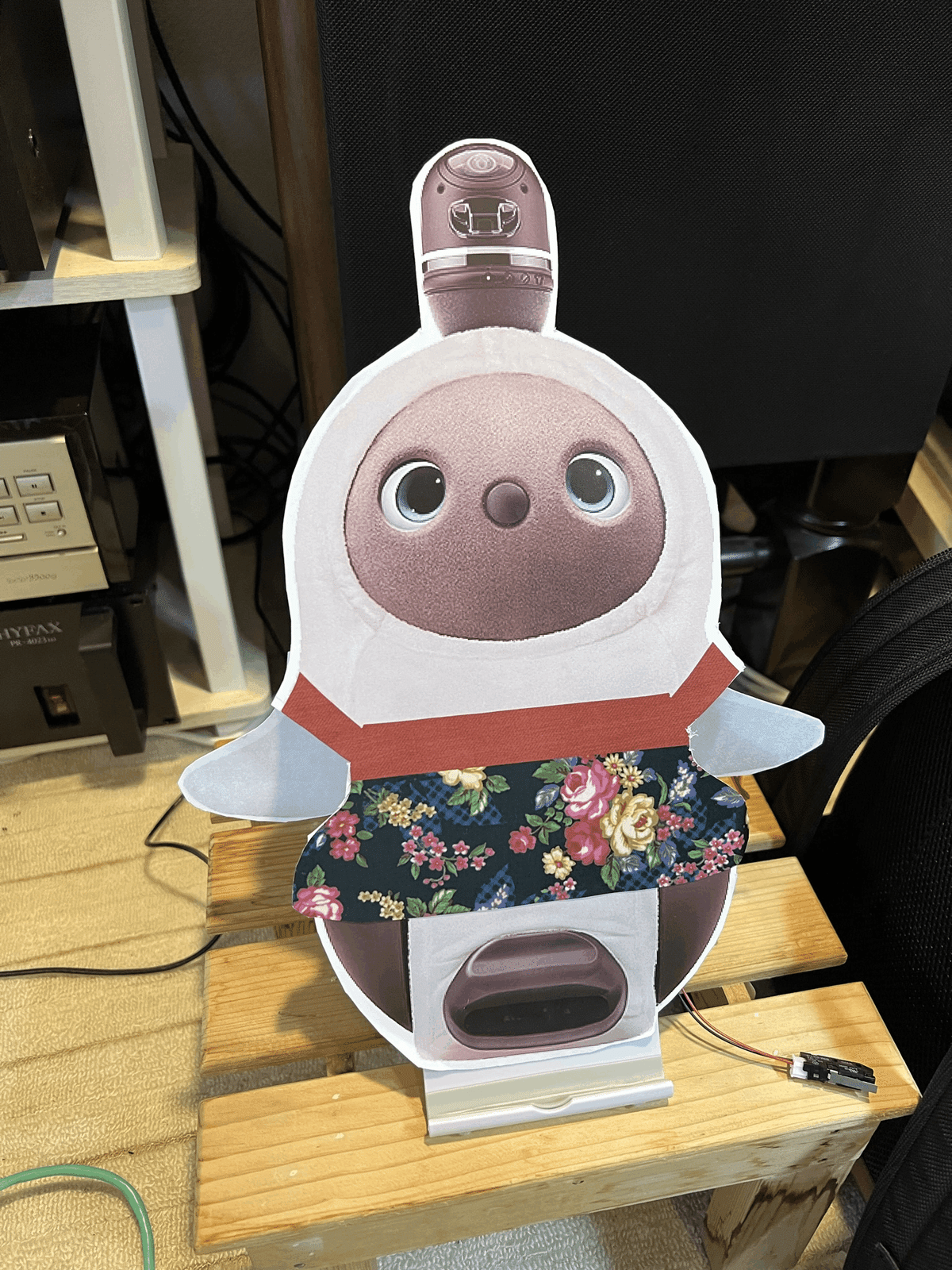
静止した状態で、このようになればOKです。サーボホーンがそれぞれ外側を向いていることが確認できます
腕を取り付けて微調整する
サーボホーンがそれぞれ外側に向いている状態で、ホーンに両面テープをはって腕のパーツと固定します。その後胴体を置いて、腕のどこにサーボホーンをはるといいか調整します。
1.サーボホーンがそれぞれ外側に向いている状態で、ホーンに両面テープをはります
2.腕とサーボホーンをくっつけます
3.胴体をスタンドに置きます。場合によっては、両面テープでスタンドと胴体をくっつけてもいいと思います
4.胴体の後ろに紙コップ(サーボモータがついている)を置き、位置を調整します
5.下記みたいになるように、腕をくっつける位置や紙コップの位置を調整します。はがせる両面テープであれば、くっつける位置を調整できます
6.腕の位置を固定したら、サーボホーンとサーボをセロテープで固定します
7.PCから動かしてみましょう!
こんな感じ pic.twitter.com/oK2IJW74mg
— よーへん((Θ・Θ))サイバネティックアバターVTuber (@Yohen_XR) May 13, 2023
AIを使って動かす
ココロキット+でAIを使って、例えばご自宅のらぼちゃんのお洋服の色やポーズによってプログラミングを動かすことができます。
今回はGoogleの「Teachable Machine」を使っていきます。
こちらはまたの機会に…!
この記事が気に入ったらサポートをしてみませんか?