プロペラシャフトのピニオン角度のモデル式

お世話になります。
私生活で色々あり遅くなりました。
まずモデル式は下記の様になりました。
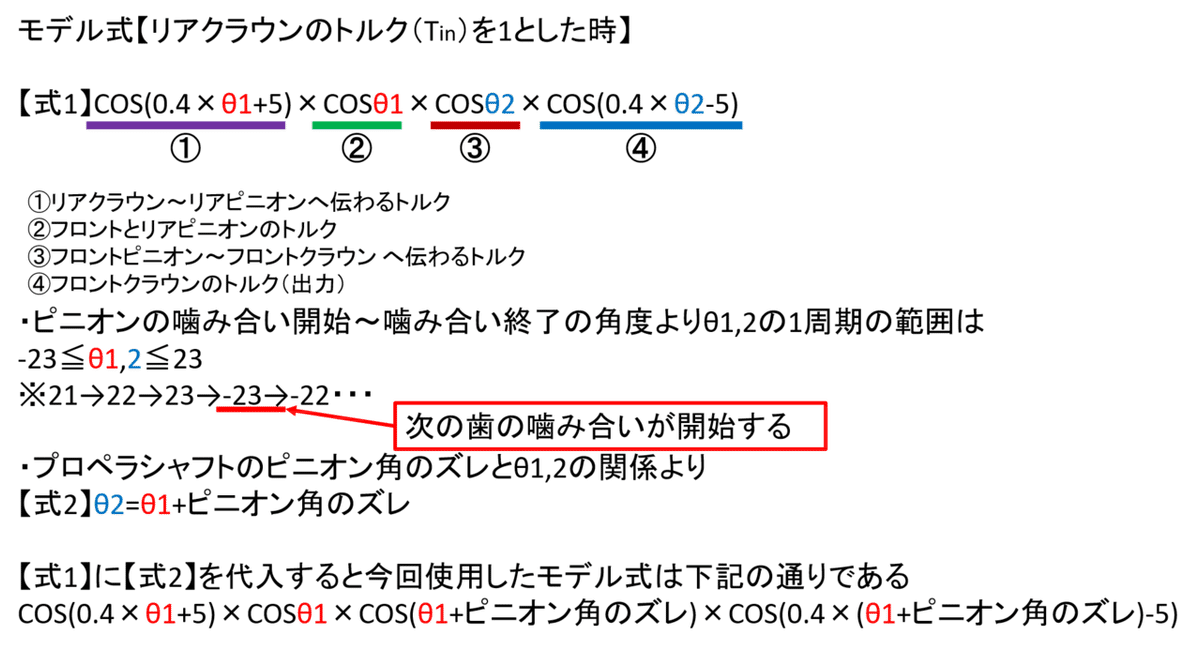
〇モデル式
COS(0.4×θ1+5)×COSθ1×
COS(θ1+ピニオン角のズレ)×COS(0.4×θ1+ピニオン角のズレ)-5)
※逆転は
COS(0.4×θ1-5)×COSθ1×
COS(θ1+ピニオン角のズレ)×COS(0.4×θ1+ピニオン角のズレ)+5)
となりました。
また、前提条件としましては下記の通りです。
・シャフトやギヤの変形は無いものとする
・各パーツの転がり抵抗、摺動摩擦は無いものとする
・フロントとリアの各パーツのクリアランスは同じ
・各パーツのクリアランスは変動しない
・フロントとリアのグリップは等しい
・各パーツごとの遊びやブレは無いものとする
以上です。
実際にはこれらがモータへの負荷の変数となるので、角度も自然に変わってきます。
前回記載した角度はこれら変数を無視した状態での値なので、本当に参考程度にしておいてください。
〇式の要素について
では、続いて式の要素について説明します。
まず、
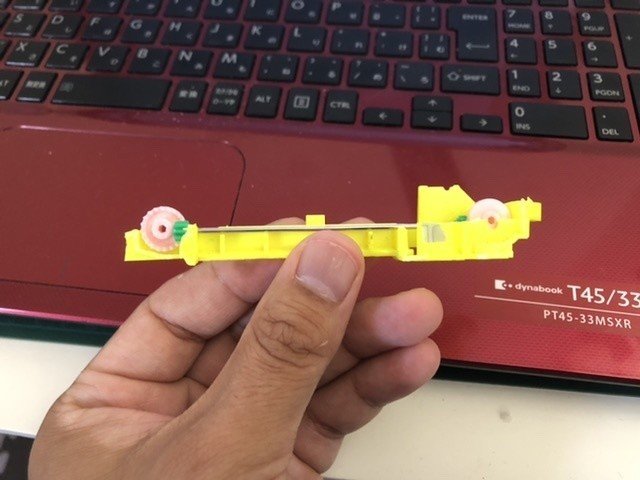
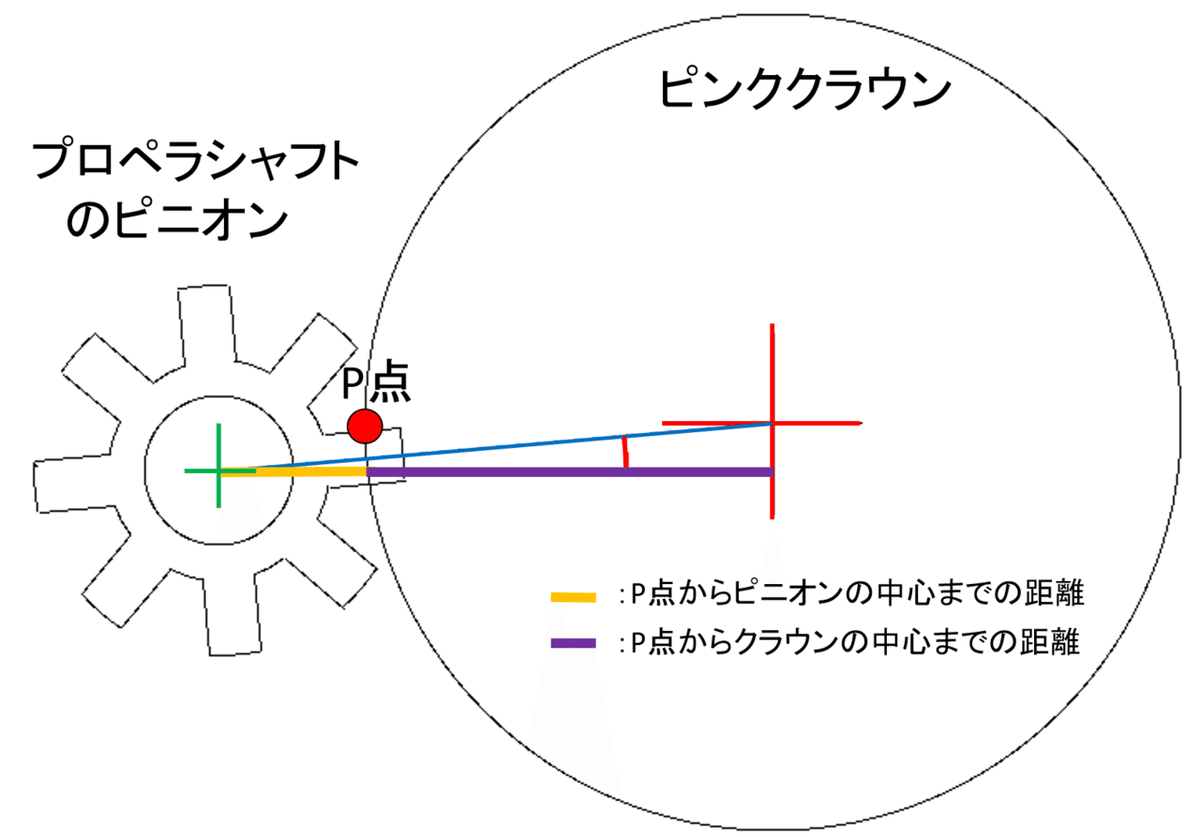
この状態でペラシャとクラウンを接着して、シャーシをバラしました。
目的はピンククラウンとペラシャの回転軸の高さズレを測定する為です。
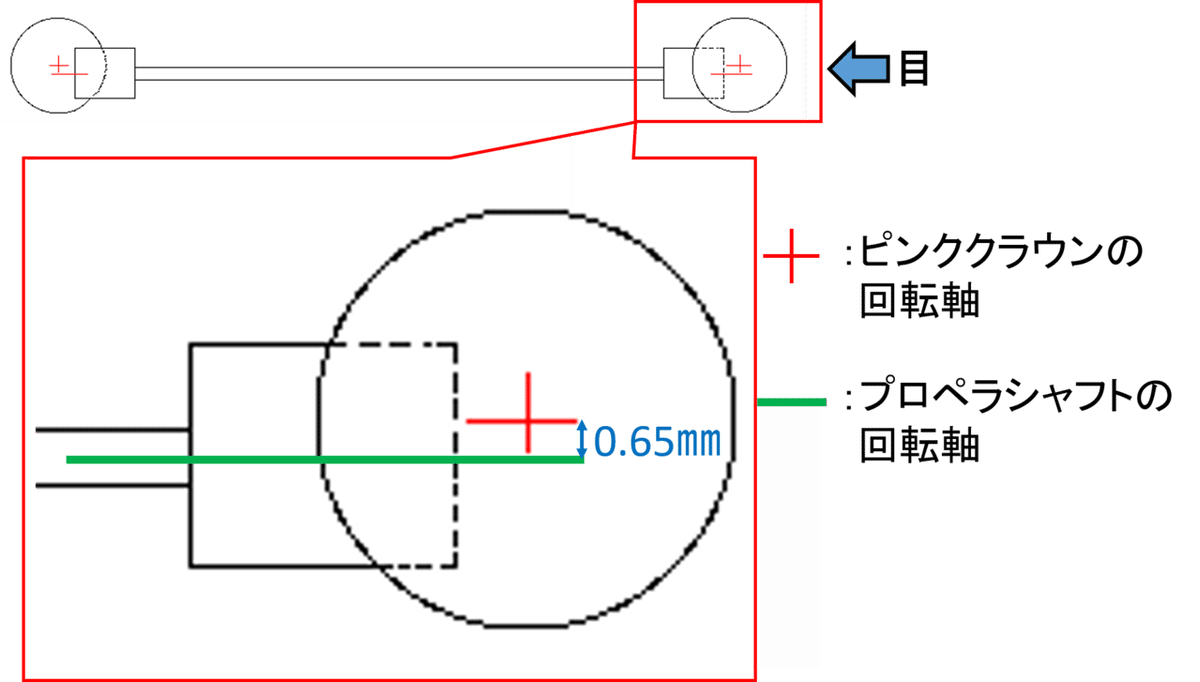
その結果、上図のようにピンククラウンとペラシャの回転軸の高さが0.65mmずれていると測定できました。(大雑把ですが)
次にピンククラウンの回転中心からプロペラシャフトの回転中心までの水平距離を求めました。


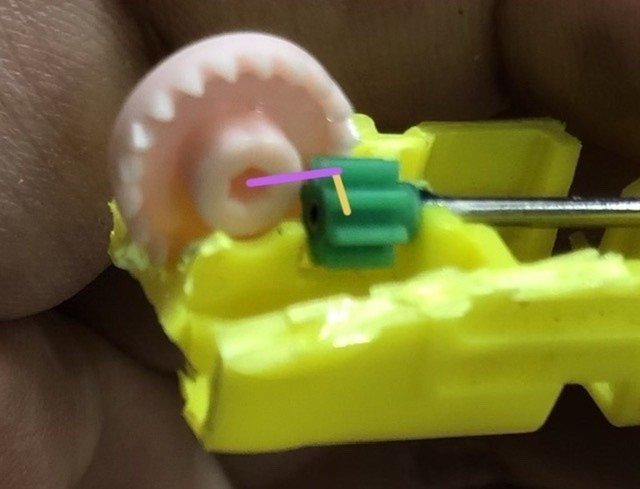
上図の紫と黄色の線を合わせたものがその距離になります。
約7.5mmでした。
この結果と先ほどの高さのズレを基にプロペラシャフトのピニオンが0°の時の当たり角度を算出しました。
※ピニオンとクラウンの位置関係が左右逆になっていますが気にしないでください(;´Д`)
結果が下図の通りです。
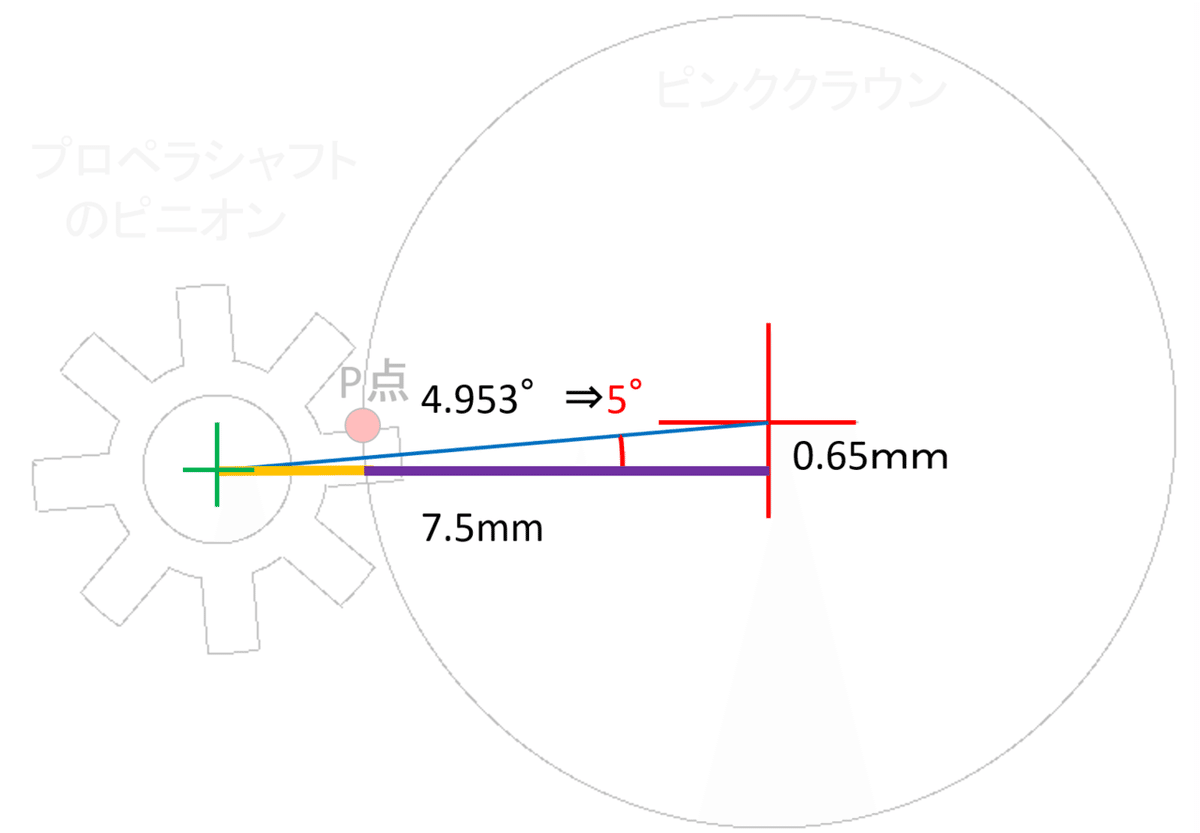
こんな感じになります。ここで出た「5」が最初のモデル式に出ている値です。
COS(0.4×θ1+5)×COSθ1×
COS(θ1+ピニオン角のズレ)×COS(0.4×θ1+ピニオン角のズレ)-5)
この値はクリアランスなどで変化するので、この値もあくまで参照です。
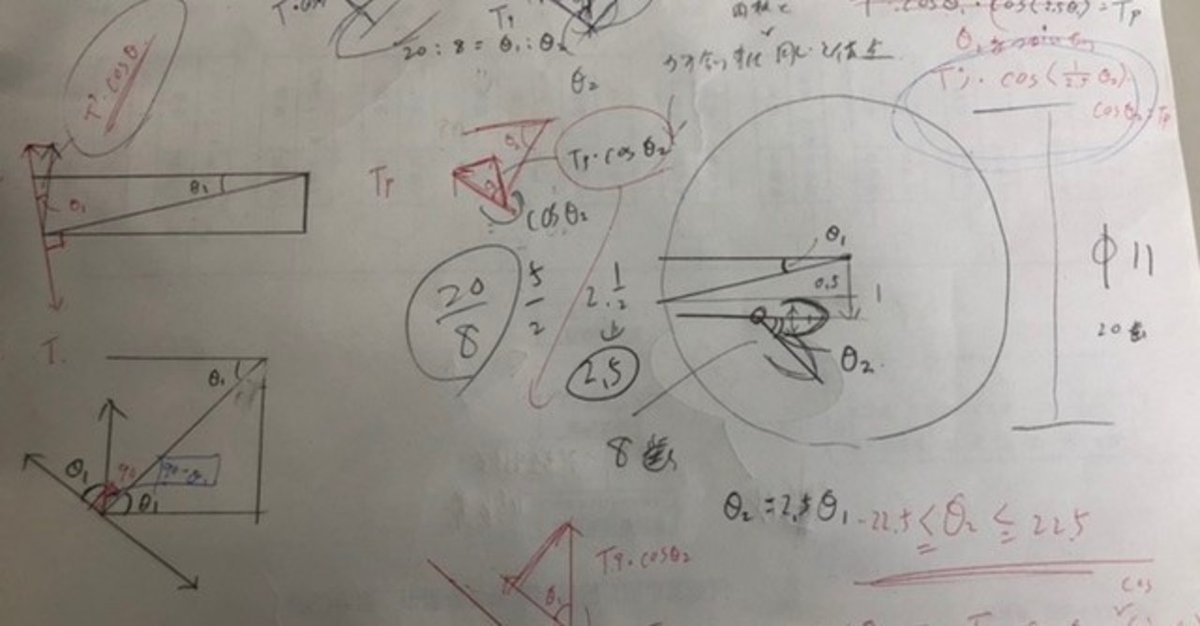
この値をふまえて、力のモーメントを表すと下図のようになります。
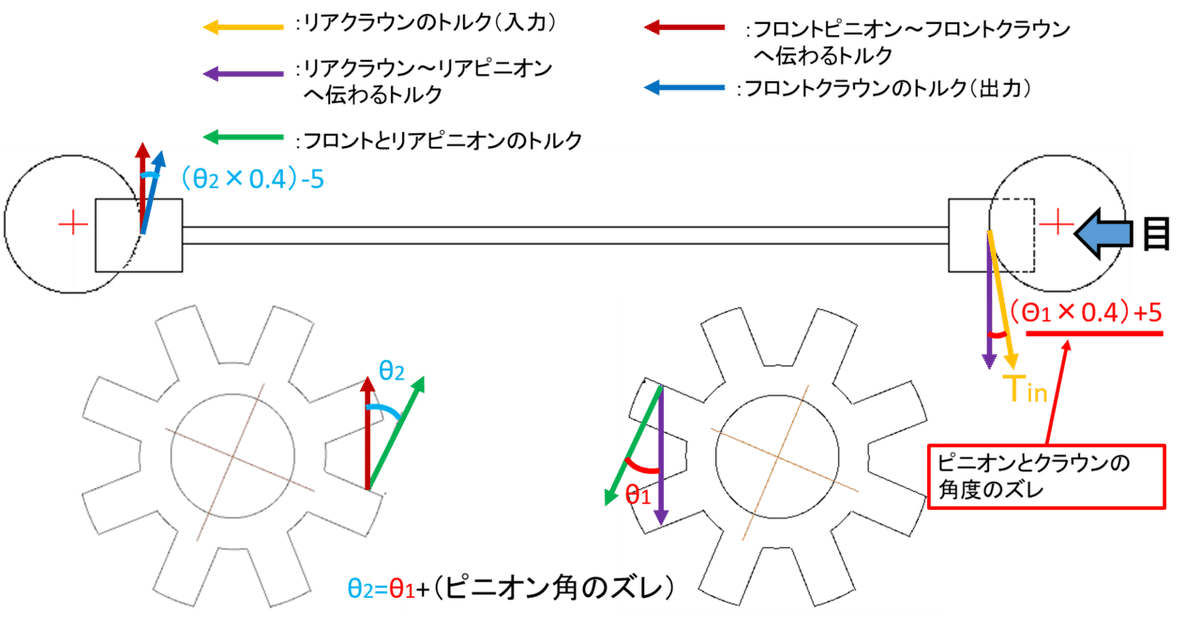
力の流れは右のリアクラウンからリアピニオン→フロントピニオン→フロントクラウンへの流れになります。
ピニオンとクラウンの角度により力の伝達比率は変わってきます。
上図はそれぞれの力毎に色分けをしています。
色で力の流れを表すと、
黄色→紫→緑→茶色→青色
となります。
ピニオンとリア側のクラウン角度のズレを表す式が
(θ1×0.4)+5
となっています。この式は下図をふまえて表しました。
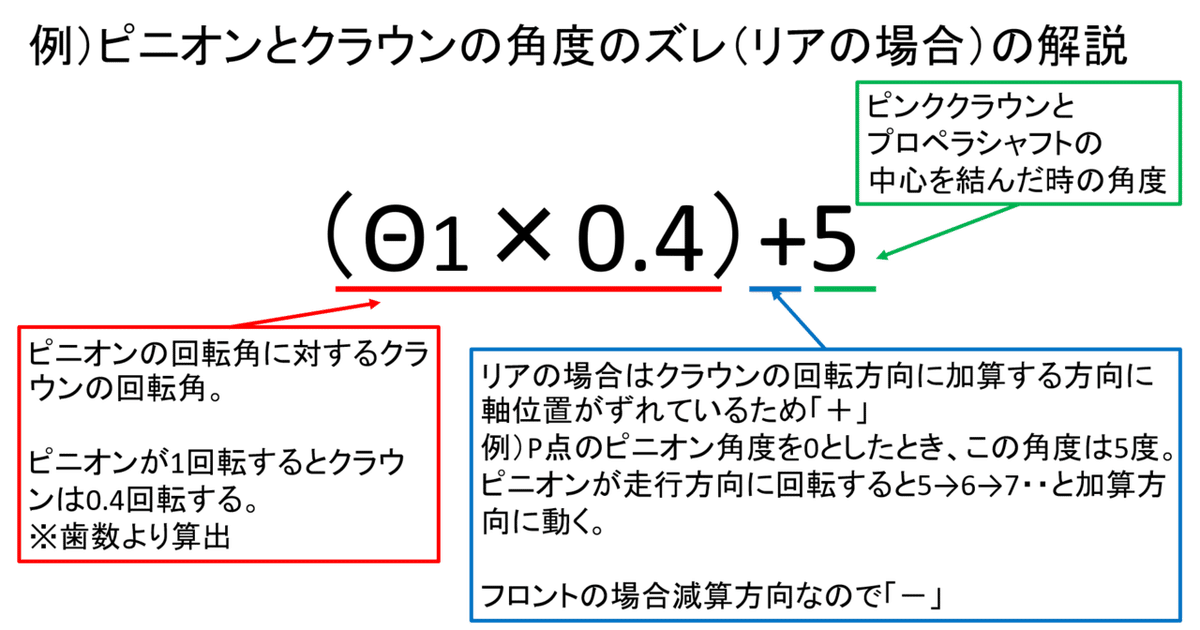
見てのとおり、ピニオンの角度変化に合わせてクラウンがピニオンに伝える力の向きの変化を表しています。
これをふまえてモデル式を考えた時、下記の通りになりました。
よって最初に提示したモデル式
COS(0.4×θ1+5)×COSθ1×
COS(θ1+ピニオン角のズレ)×COS(0.4×θ1+ピニオン角のズレ)-5)
となりました。
〇検証
「ピニオン角のズレ」に0~45°までの値を7.5°刻みで代入した式を作成します(6種類。0度=45度)それらの式に分解能1度でピニオン1回転当たりの平均伝達率をまとめたものが下図のようになります。
※同じ角度を2回入れているのはグラフ作成の為です。気にしないでください。
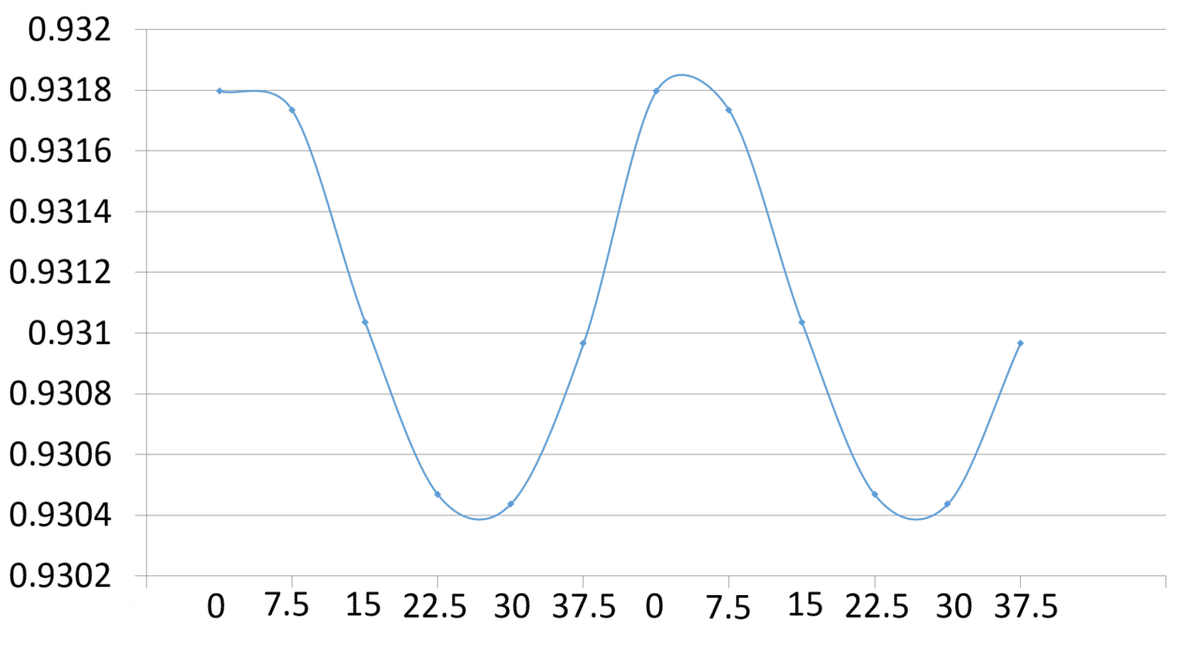
実測のデータも0→7.5→15→22.5→30の順番でした。
バラツキまで考えると追従しているとは言いにくいですが、方向性はあっているようなので、平均伝達率を評価の指標としました。
また、上図より0~7.5°の間に最大値がありそうだったので、そこを0.5°刻みでグラフを作成した結果下図のようになりました。
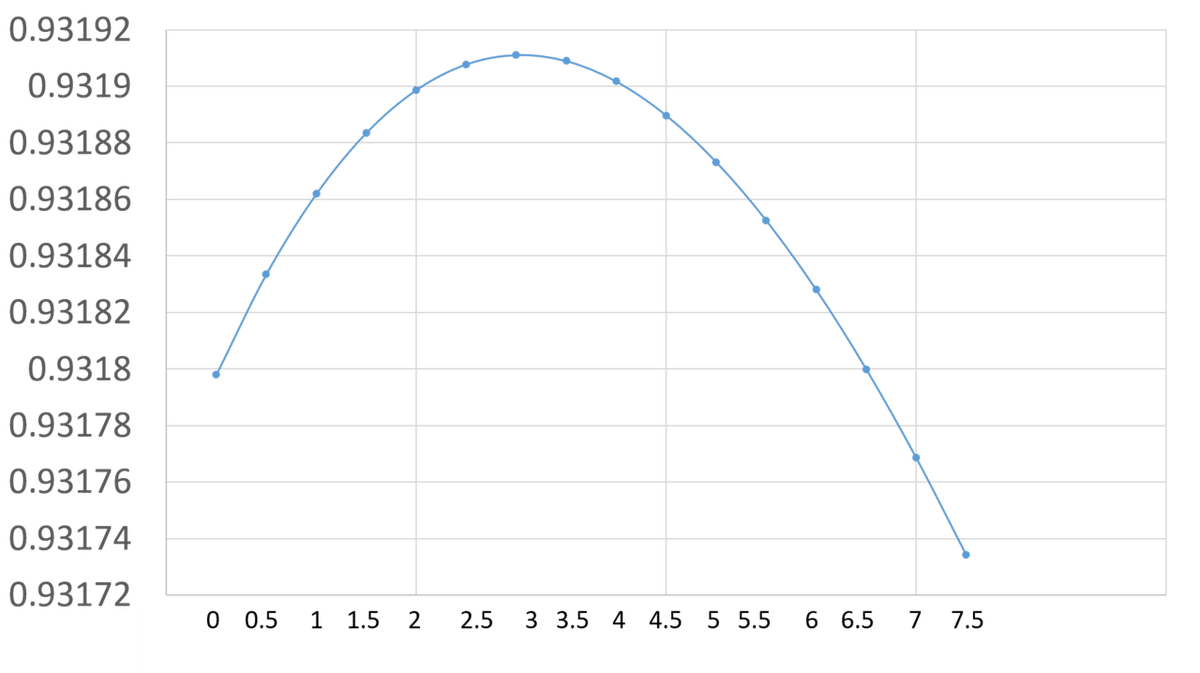
これらの値より、「3°」を推奨値にしました。
〇まとめ
・モデル式
COS(0.4×θ1+5)×COSθ1×
COS(θ1+ピニオン角のズレ)×COS(0.4×θ1+ピニオン角のズレ)-5)
・実測データより「平均伝達率」を評価の指標に決定
・「ピニオン角のズレ」に値を代入し、算出した値を比較した結果、推奨値の「3°」を算出
以上です。
見てのとおり、色々な条件を仮定してモデル式を作成しております。
推奨値の「3°」はあくまでこのモデル式で出した値です。
マシン毎の変数も多いので、各マシン毎に最適な角度は変わってきます。
各々のマシンで調整をお願いします。
長文でしたが、読んでいただきありがとうございました。
この記事が気に入ったらサポートをしてみませんか?