myCobotの初期設定

格安ロボットアームであるmyCobotの初期設定のやり方を備忘録として記す。
私は以下の環境下で設定しています。
OS:windows10 pro(homeでも可)
ロボット:myCobot
1.MyStudioをダウンロード
myCobotの公式サイトから最新のMyStudio(2021/5月時はV2.1が最新)をダウンロード

windows.zipを選択してダウンロードする。
解凍後にMyStudio.exeで起動する。

今後はmyCobotのBasic(足元)とAtom(アームの先端)にUSBを接続してファームウェアを焼き付けるのだが、そのままだとUSBをつないでも認識しない。
Basicを認識するには以下サイトからドライバー(CP210z_VCP_Windows)をダウンロードして解凍して実行する。
https://jp.silabs.com/developers/usb-to-uart-bridge-vcp-drivers
Atomを認識するには以下サイトに倣ってドライバー(CDM21228_Setup)をダウンロードして解凍して実行する。
2.ATOMにファームをやきつける
アームの先端にUSBをつなげて、MyStuio.exeをクリックするとUSB Portの欄に"ATOM"が表示される。

Connectをクリックして

AtomMainの任意のバージョンを選択する。(私はv2.4を選択しました)

後はFlashをクリックして焼き付ける。
これにより、アームのAtomにAtommainv2.4が焼き付けられた。
3.Basicにファームをやきつける
足元にUSBをつなげて、MyStuio.exeをクリックすると、USB Portの欄に"Basic"が表示される。

Connectをクリックして

MainControlのDownloadをクリックする。
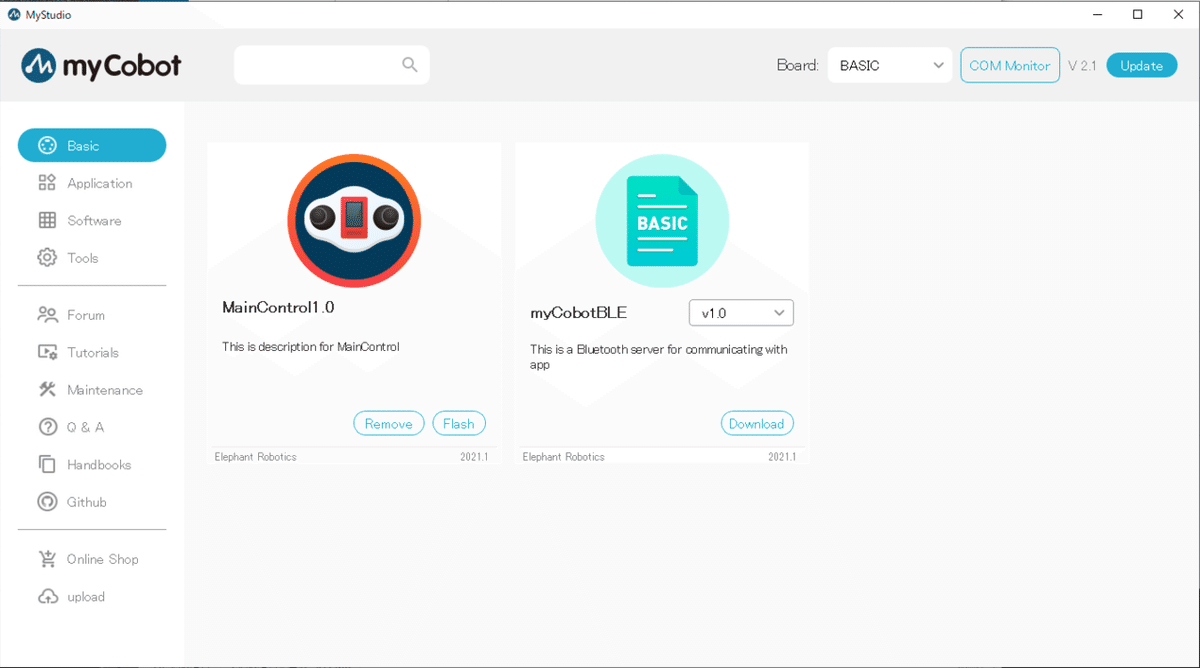
後はFlashをクリックして焼き付ける。
これにより、先ほど焼き付けたアームのAtomのバージョンに合わせたファームウェアがBasicに焼き付けられた。
AtomとBasicのバージョンを合わせないとロボットアームが正常に機能しないので順番に注意すること。
この記事が気に入ったらサポートをしてみませんか?