
ASIAIRと一眼カメラで極軸合わせをしよう

ASIAIRは極軸合わせ(以後 PA )を支援する機能があります。
この機能を使って望遠鏡と天体用カメラで極軸合わせをするのはよくやることなのですが、これを星景写真を撮影する機材でやってみようという試みです。
使用機材
一眼カメラ
カメラはこちらα7IIIです。
フルサイズセンサーのミラーレスカメラです。

カメラレンズ
レンズはTamron 28-200mmのいわゆる便利ズームですが、28mmでF2.8なので星景写真にも使えないこともないレンズです。

ASIAIR
ASIAIRは私はPlusとminiを持ってるのですが、Plusは別の機材に組んだままなので今回はASIAIR miniの方を使います。
赤道儀
赤道儀はSWATを使います。
いわゆるポータブル赤道儀ですが、SWATは赤経軸のターンテーブルがスムーズに回せるので今回の利用に向いています。他のポータブル赤道儀の場合には間にパノラマクランプを付けるなど考えた方がいいかもしれません。

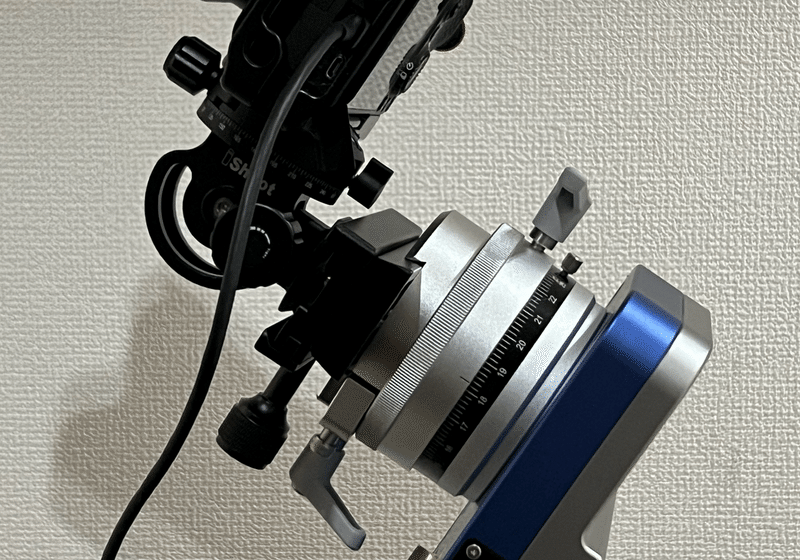
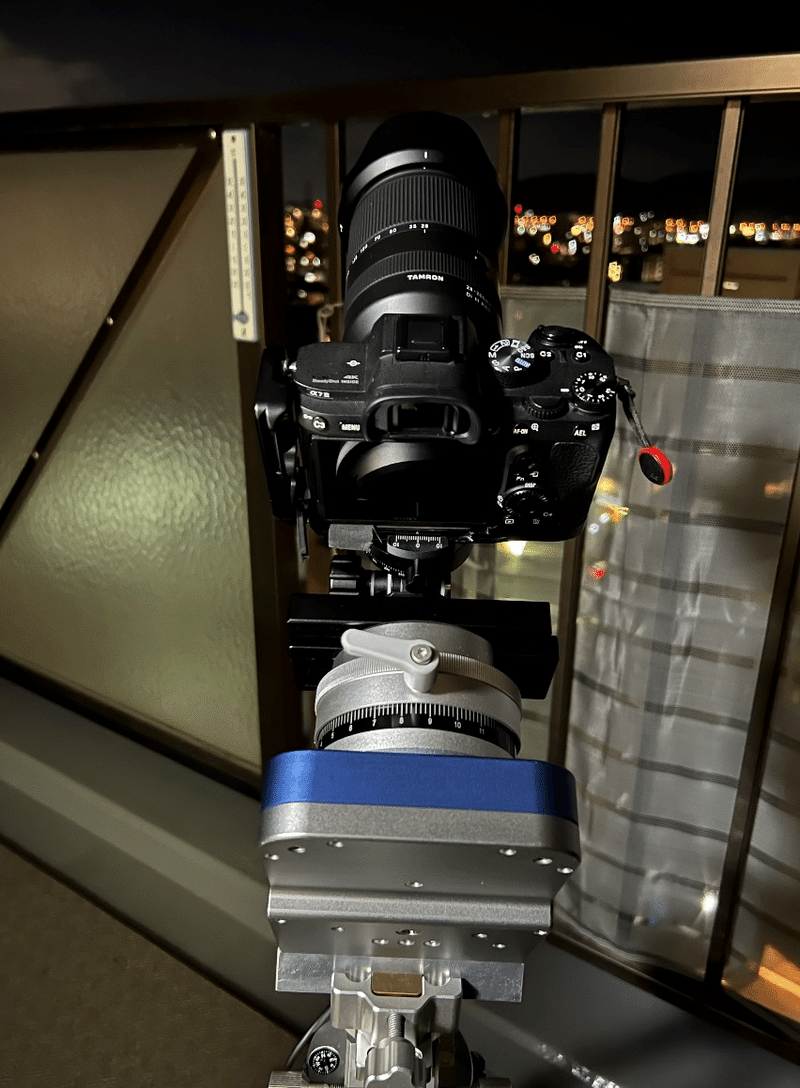
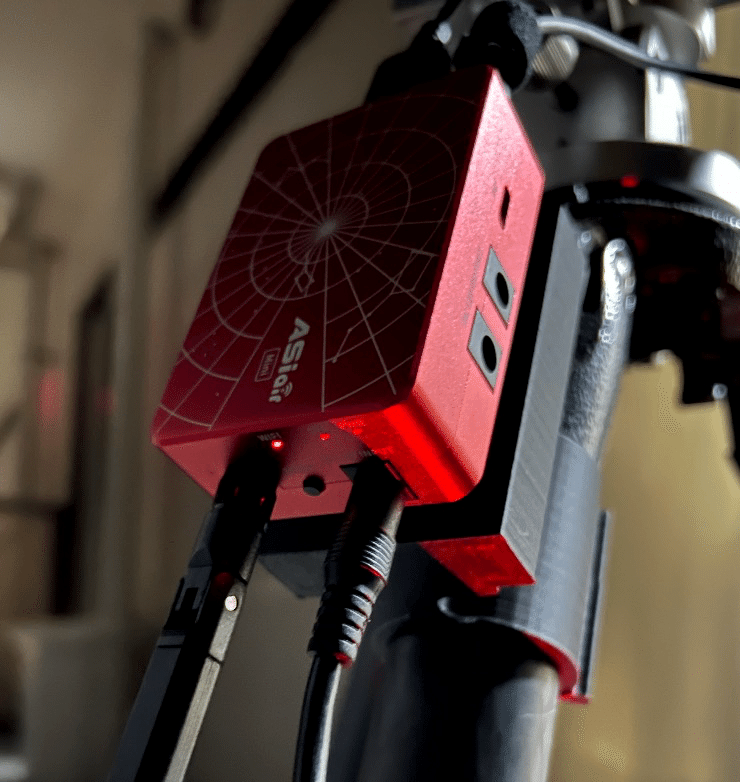
機材の組み方
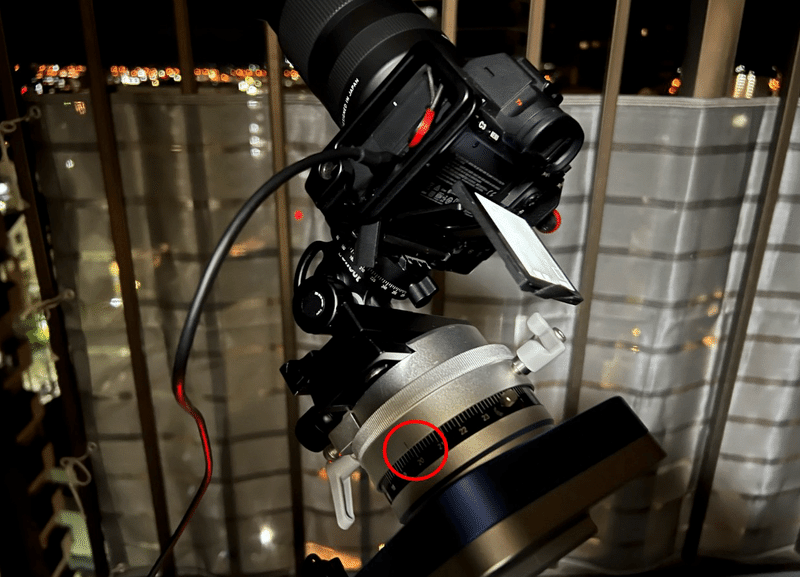
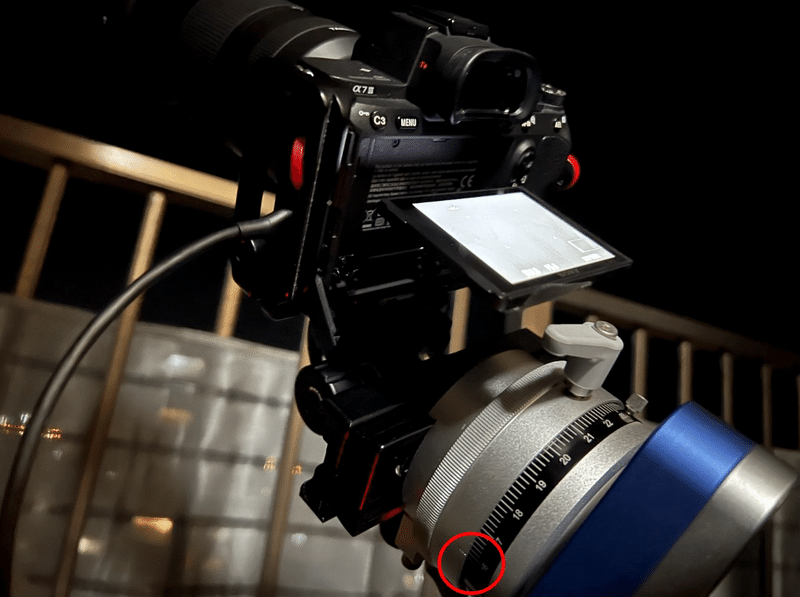
機材はこの様に組みました。
カメラのUSB-C端子をASIAIRのUSB-A端子と接続し、SWATの電源へはASIARIのUSB-A端子から供給しています。そしてASIAIRへの電源供給はポータブル電源から供給していますが、対応するポータブルバッテリーからUSB-Cのトリガーケーブルでもいいと思います。

ちなみに赤道儀のターンテーブルとカメラの間は自由雲台ではなく、1WAY雲台を使うようにしています。自由雲台だと固定しきれない場合があるのと、この1WAY雲台が1/4ネジではなくアルカスイスで固定できるので不意に回って緩まないからです。
極軸合わせの準備
だいたい北向きに設置する
まずは機材をだいたい北向きに設置します。
SWATの微動雲台には方位磁石もついているのですが、自宅バルコニーは隣の建物の大きなアンテナの影響で方位磁石がズレちゃうので「山に見えてるあの鉄塔の3本目」と覚えて向けています。
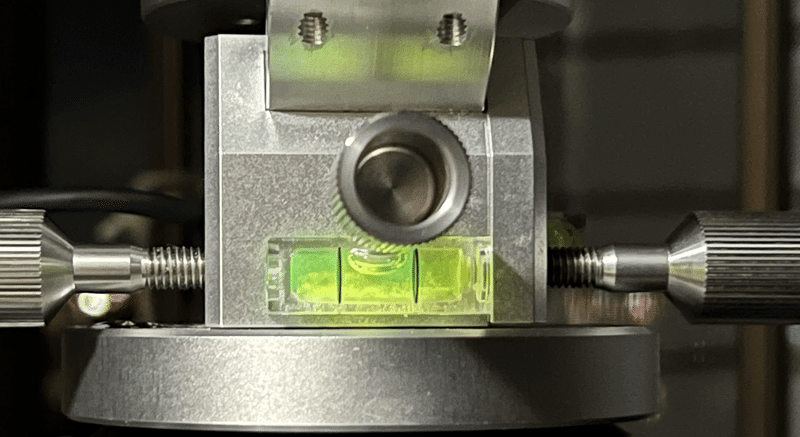
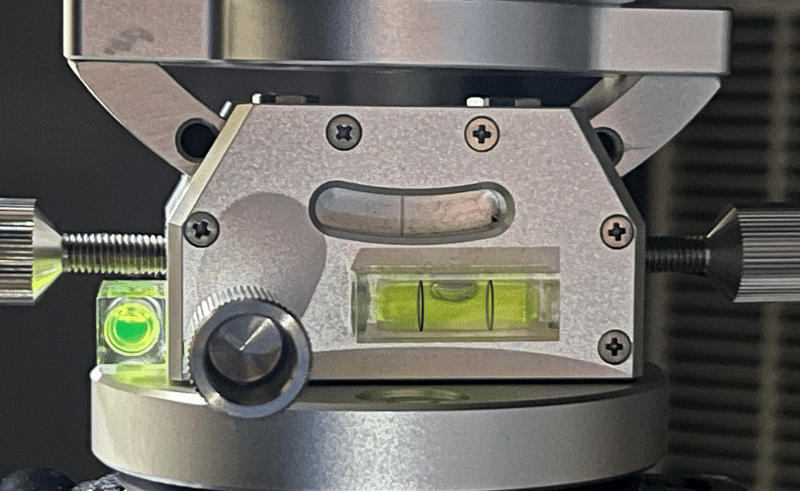
微動雲台の水平を取る
続いて微動雲台の水平を取ります。
SWATの微動雲台には丸タイプの水準器がついているのですが、三脚の脚で水平を合わせるときに横から見ることができるほうが作業しやすいので棒タイプの水準器を2つ両面テープで貼り付けています。
カメラの電源を入れてピントを合わせる
カメラの電源を入れて星にピントを合わせます。
これは普段の撮影と同じですね。
今回は焦点距離をテレ端の200mmでやります。
ライブビューで星が点像で一番小さくなるポイントに合わせます。

露出を合わせる
このあとASIAIRに接続してPAを行う際には、1秒〜5秒くらいがいいのでそれに合わせて絞りおよびISOを設定します。
絞りとISOを設定したら、シャッタースピードをBULBにします。

ASIAIRと赤道儀の電源を入れる
ASIAIRと赤道儀の電源を入れます。
自分の場合にはASIAIRの電源を入れるとSWATも自動的に電源が入る接続の状態になってました。
極軸合わせ作業
ASIAIRアプリの接続
極軸合わせを目的として利用する場合にはMountはNoneで問題有りません。
あとレンズの焦点距離を入力します。
Main Cameraは適切に接続されていれば自動的に認識します。
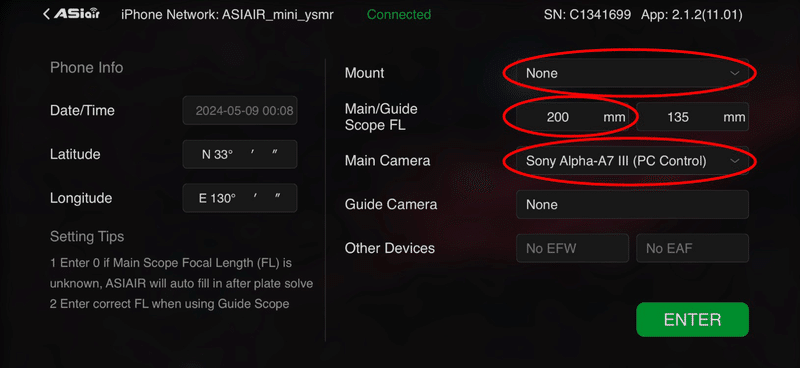
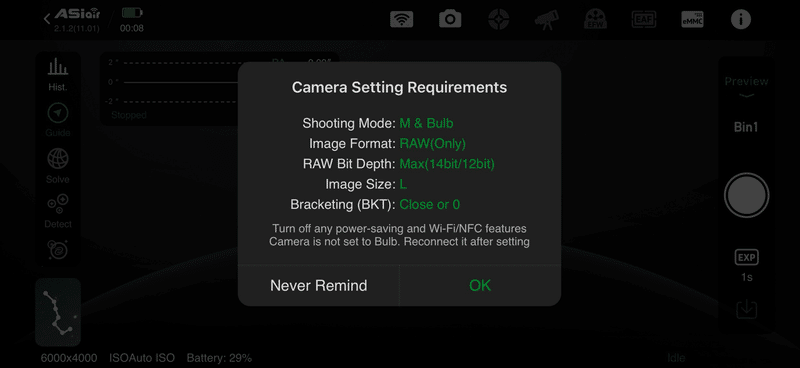
ENTERを押すとカメラに設定すべき内容が表示されます。
カメラメーカー・機種ごとに違うと思うのでよく確認しましょう。
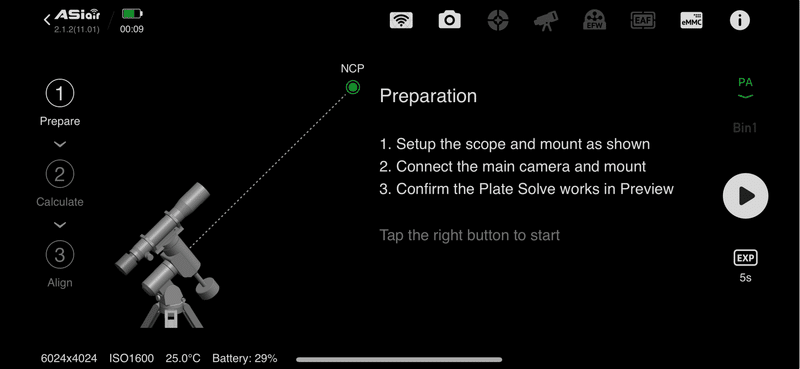
Previewで撮影して確認
接続できればPreviewでまず撮影してみましょう。
星が写ってない場合には露出時間(EXP)を調整しましょう。
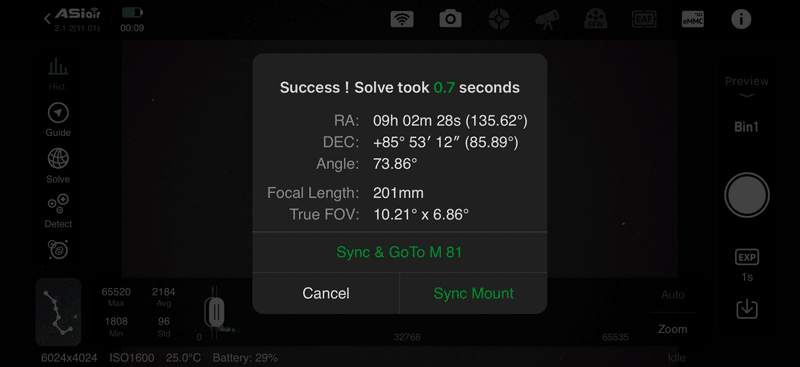
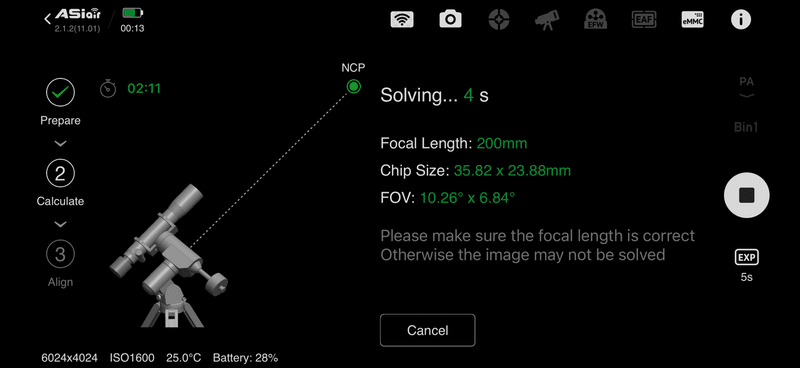
調整できたら左側のSolveを押してみましょう。
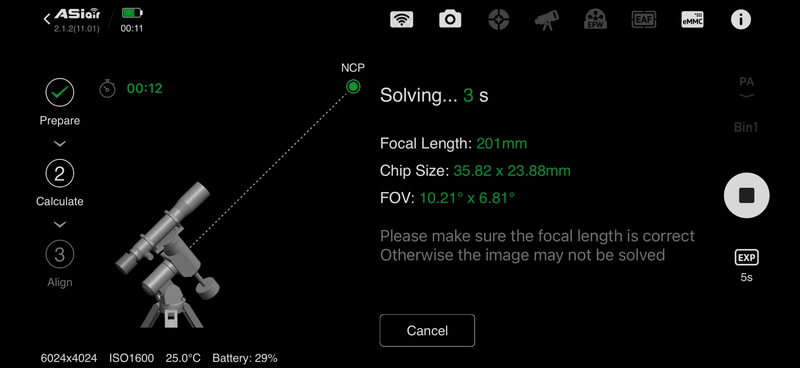
プレートソルブが実行されカメラが赤経赤緯(RA,DEC)で星空のどこを向いているか確認できます。
併せて厳密な焦点距離と画角が表示されます。
60度回転させる準備
極軸合わせの作業中に60度回転させる必要があるので、回転の開始位置として程よい所にします。
SWATには目盛り環がついているので20時の所に合わせました。
PA機能に切り替えて開始
さてメニューをPreviewからPAに切り替えます。
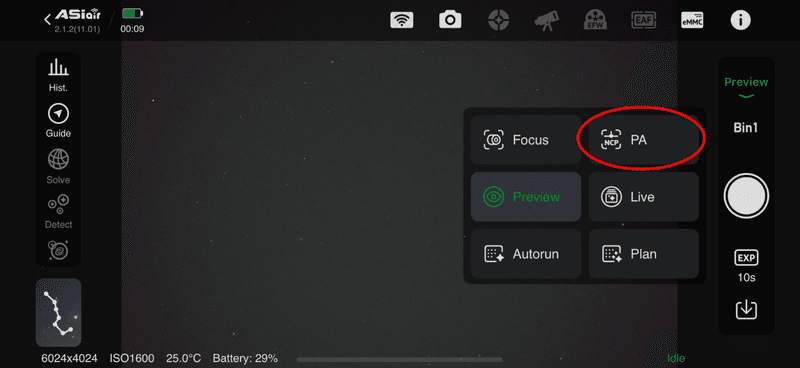
PAの画面が表示されたら開始ボタン(▶)を押します。
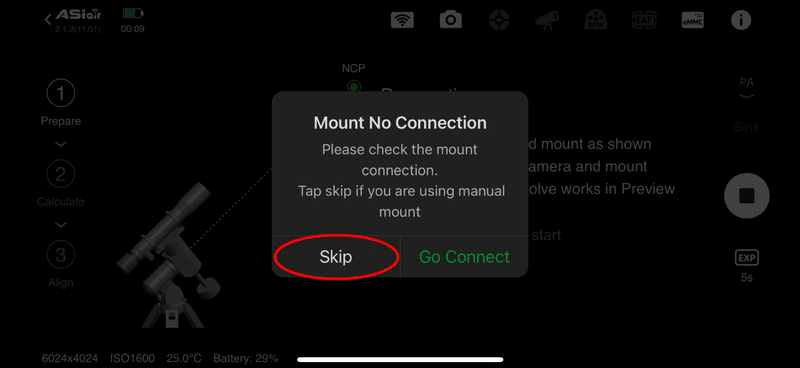
するとMount No Connectionが表示されます。
確かに繋いでないんですが、自動導入に対応していない赤道儀では接続の必要がないので問題有りません。Skipを押します。
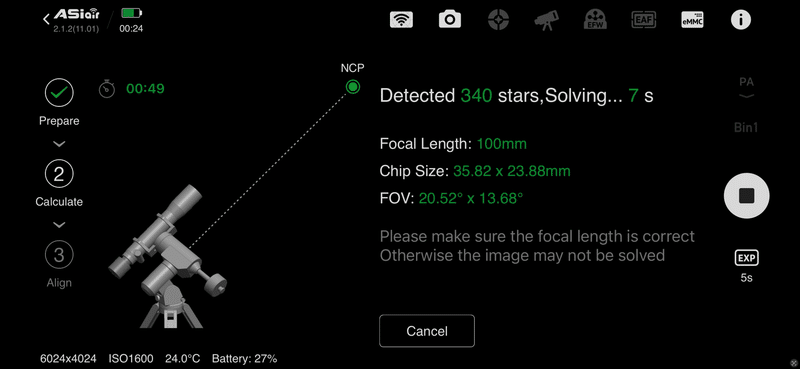
1回目の撮影
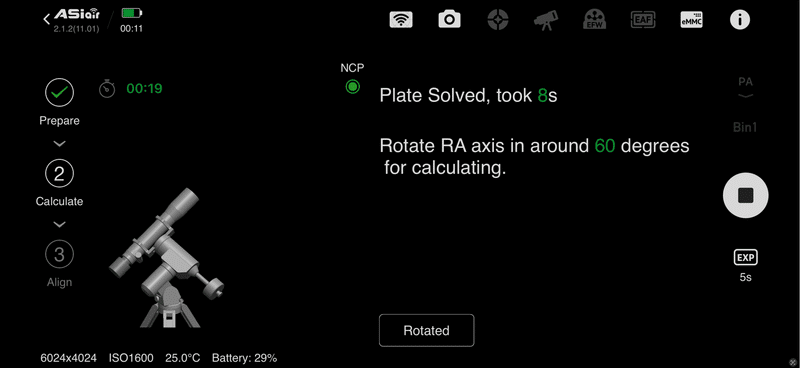
すると1回目の撮影が始まります。
するとプレートソルブが行われます。
プレートソルブが成功すると「60度回転させろ」と表示が出るので回転させます。
60度回転
ターンテーブルを60度東から西へ回転させます。
目盛り環を20時→16時に回転させました。
2回目の撮影
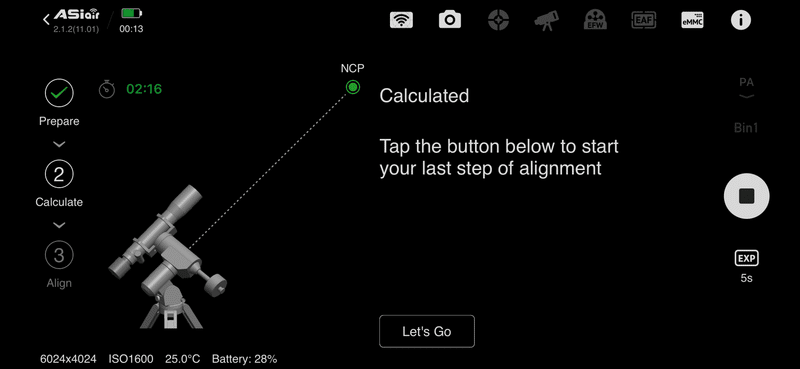
回転後にRotatedを押すと2回目の撮影が行われてプレートソルブが始まります。
プレートソルブに成功すると計算が完了し、Let's Goと表示されます。
これが表示されると極軸合わせを実施可能と言うことです。
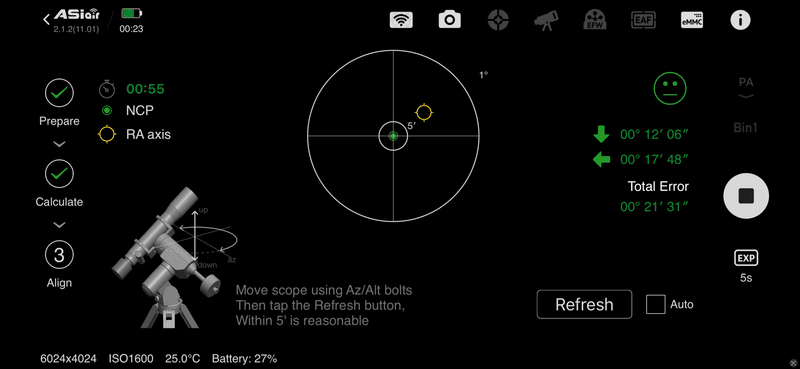
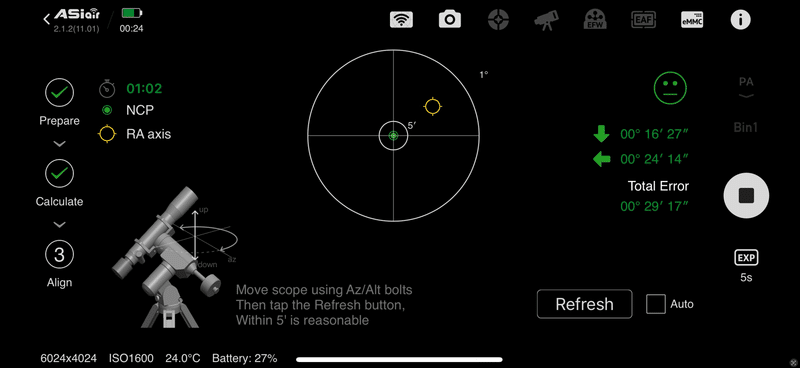
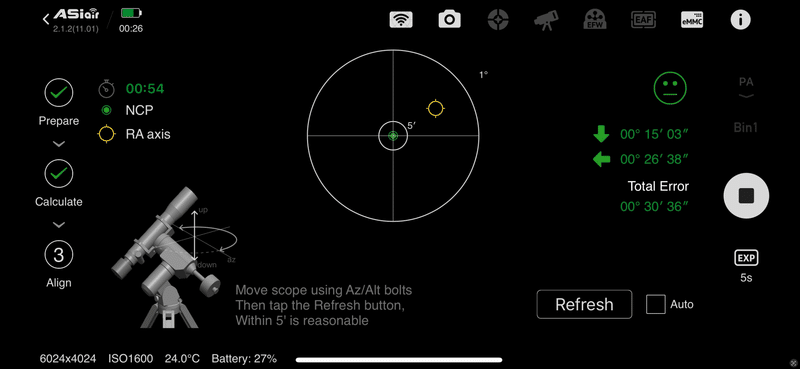
微動雲台で調整
Let's Goを押すと調整が始められます。
Total Errorの上部に上下・左右にどれだけ移動させるべきか表示されているので、それを参考に微動雲台の調整のノブで調整し、Refreshを押して再計算させます。
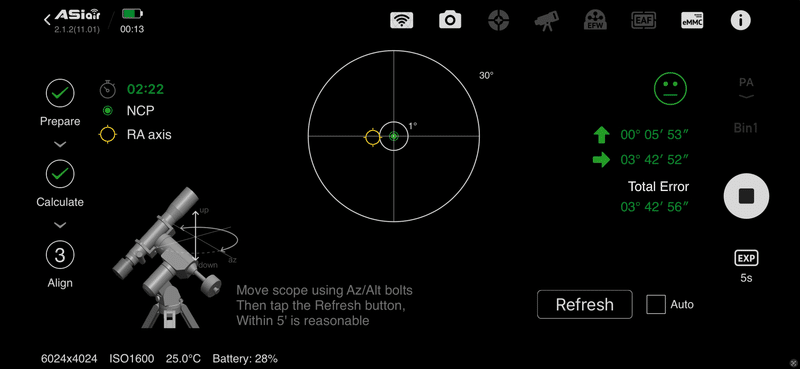
調整・Refreshを繰り返しTotal Errorが00'00''を下回った所でFinishを押します。
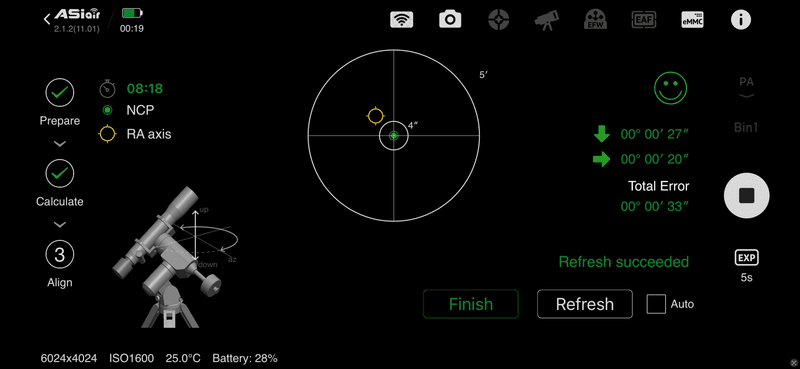
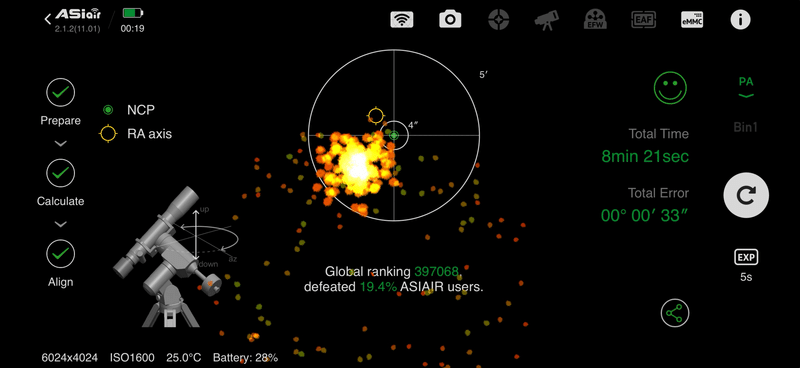
すると花火が打ち上がりますw
今回は8分21秒で極軸合わせを完了させられました。
焦点距離はどこまで広角でPAできるか?
200mm
前述の通り200mmではASIAIRで極軸合わせを実施できました。
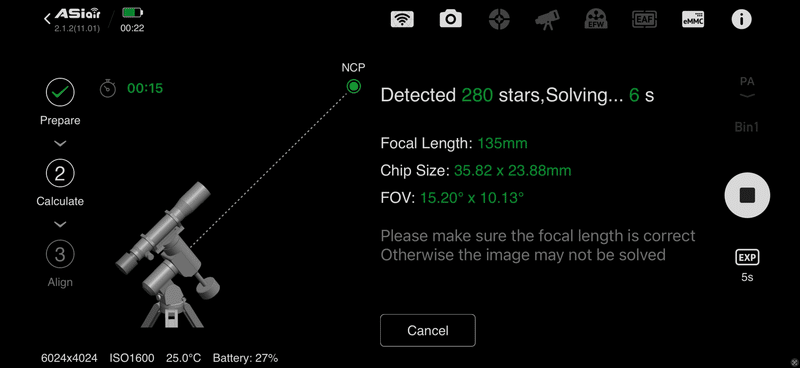
135mm
さて135mmではどうでしょう?

135mmにすると画角が15.20° x 10.13°と表示されています。
100mm
100mmだとどうだ?

100mmにすると画角が20.52° x 13.68°と表示されています。
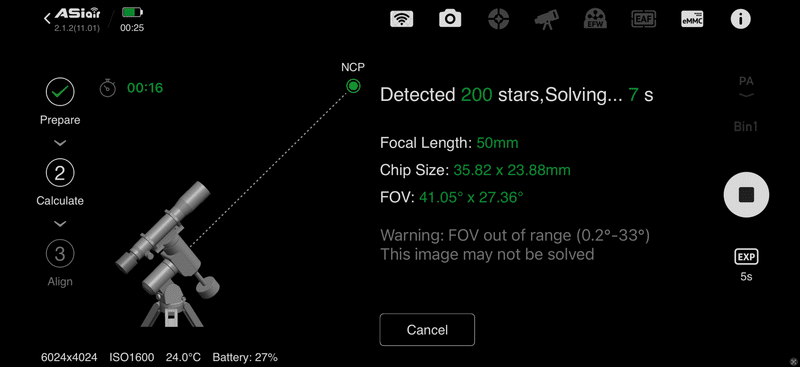
50mm
50mmは星景写真に使う人もでてくる範囲ですね。

50mmにすると画角が41.05° x 27.36°と表示されています。
その下の薄い文字を見ると警告が出ていますね。
0.2° - 33°に入ってないとプレートソルブが出来ないかも。と
確かに水平画角は33°を超えていますね。
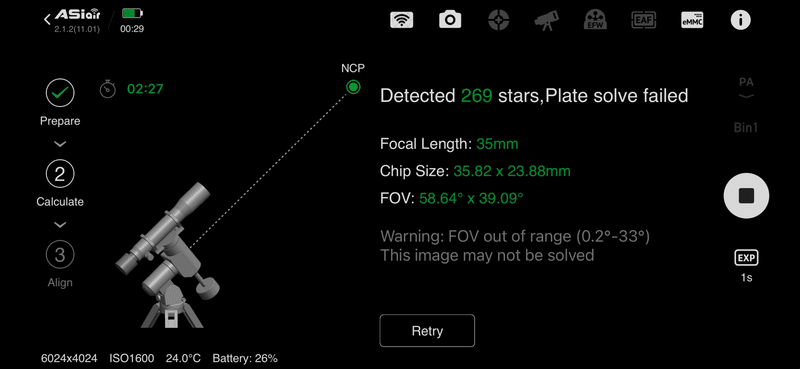
35mm
35mmは自分が星景写真を撮るときに一番使う焦点距離です。
これで出来たら結構便利かも!

35mmにすると画角が58.64° x 39.09°と表示されています。
水平画角も垂直画角も33°を超えていますね。
そしてPlate solve failedになりました。50mmくらいが限界みたいですね。
ということで広角側は垂直画角が33°を超えない範囲であれば41mmくらいまでが限界のようです。
望遠側はフルサイズセンサーであれば10000mmまでは水平画角が0.2°を下回らないので大丈夫そうですが、あんまり来にする必要はなさそうですね。
最後に
極軸望遠鏡で極軸合わせが苦手な人が一定数いるみたいなので、こういった
方法で極軸合わせするのもありですよね。
少なくともPolarMasterとPCを山に持って登るよりはASIAIR miniとモバイルバッテリーとケーブルで済むのはいいですよね。
それに極軸望遠鏡って結構高い(自分のは35,750円)ので、今から買う人はこれ目的でも撮影制御までさせることを考えてもASIAIRを買うのは全然有りだと思います。
またASIAIRを使うと北極星が見えていなくても極軸合わせできます。星景写真では構図優先で考えると極軸望遠鏡の使えない場所になることもあります。
そういった場合にもこれが活用できます。
と、ツラツラと書きましたがZWOの回し者では有りませんw
追尾撮影する仲間が増えたらいいなーと思ってるところです。
この記事が気に入ったらサポートをしてみませんか?