
Raspberry Pi Picoで動くキーボード「PiPi Gherkin」を作ってみた

PiPi Gherkinとは?
40%Clubが作った30キーのキーボードGherkinをRaspberry Pi Picoで動くようにしたキーボードです。基板のデータはCC BY-SA 4.0で公開されていて、TALP KEYBOARDさんで基板のみ販売されているので、こちらを購入しました。
組み立て
基板以外に用意する部品
基板以外は自分で用意します。
・Raspberry Pi Pico x 1
・ダイオード(1N4148) x 30
・MX用キースイットソケット x 30
・MX用キースイッチ x 30
・MX用キーキャップ x 30
・ピンヘッダー20ピン x 2(今回はPro Microのあまりを利用しました)
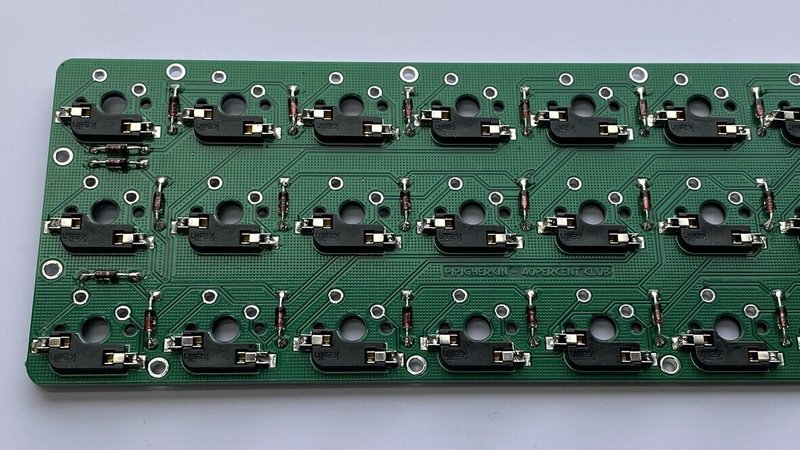
ダイオードをつける
久々にスルーホールタイプのダイオードをつけていきます。自家製ダイオードベンダーでキレイに曲げていきます。
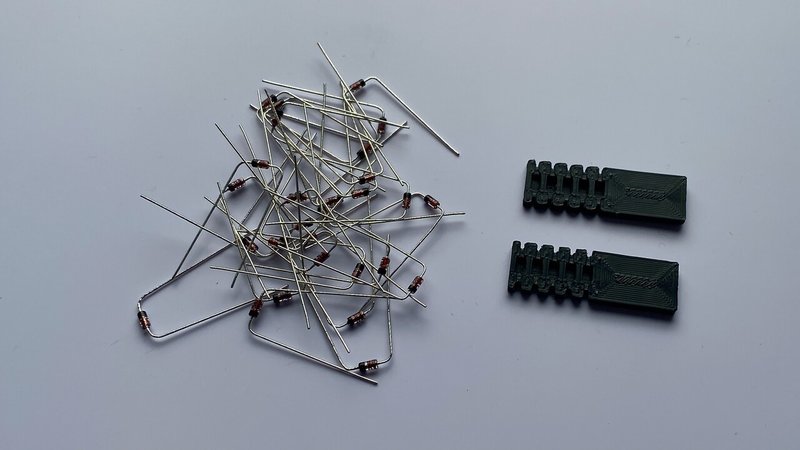
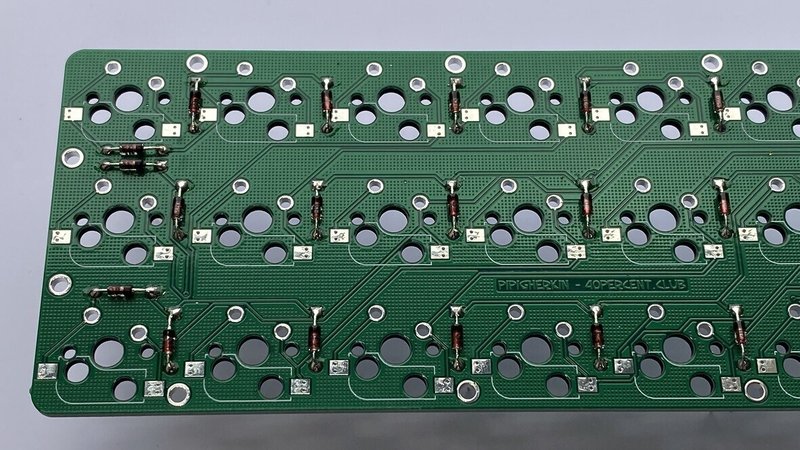
こんな感じで30本つけていきます。
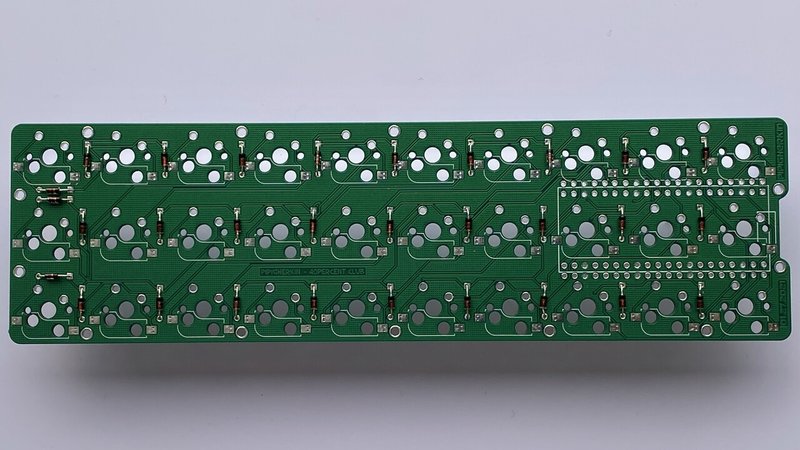
一部ダイオードの向きが違うところがあるので注意。
今回はダイオード側からハンダ付けしてみました。
ハンダ付けが終わったら、反対側に生えている足をニッパーで切ります。
キースイッチソケットの取り付け
こちらは他の自作キーボードキットと同じようにつけていきます。
Raspberry Pi Picoの取り付け
いつものPro Microと違うところです。
手持ちのピンヘッダでは高さが足りなかったので、余っていたPro Micro付属のピンヘッダを使っていきます。
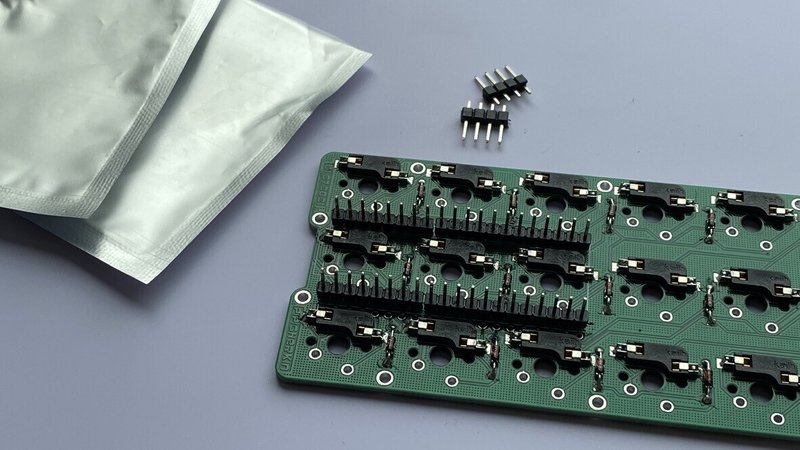
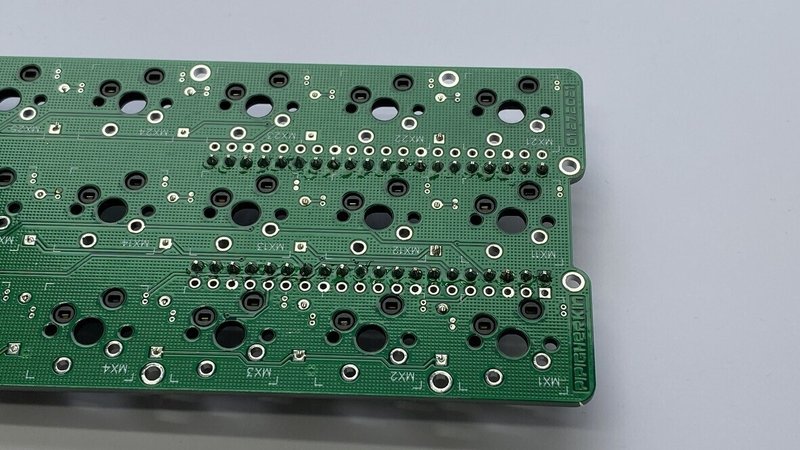
まずはピンヘッダをPCBにハンダ付けします
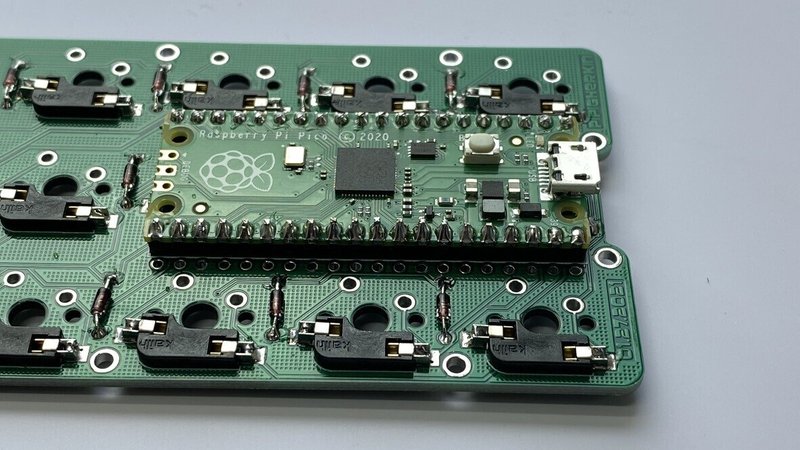
お次にPicoをハンダ付けします。足が長いので適当に切ってからハンダ付けします。(付ける前に、一応ファームの確認をした方が良かったかも)

キースイッチの取り付け
ソケットにスイッチをつけます。
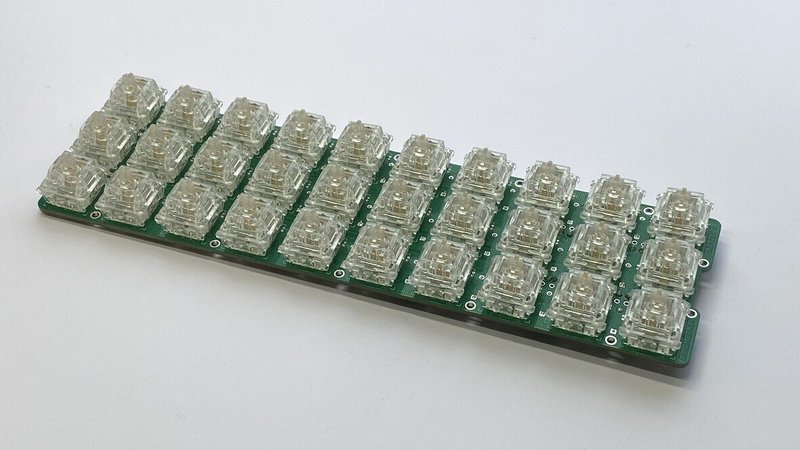
ケースやキーキャップは必要ですが、ひとまず組み立てはここまでにしておいて、ファームウェアを確認していきます。
ファームウェア
ファームウェアはRaspberry Pi Pico上で動く「KMK Firmware」を使っていきます。
Circuit Pythonの導入
KMK Firmwareは「Circuit Python」というファームウェアの上で動くので、まずはこれを書き込みます。
↓からUF2ファイルをダウンロードします。
Pi Pico上のボタンを押しながら、PCとUSB接続します。
ドライブとして認識されるので、そこにUF2ファイルをドラッグ&ドロップします。しばらくすると、「CIRCUITPY」というドライブになります。
KMKの導入
KMKのリポジトリ↓をcloneするか、緑色のCodeボタンから「Download ZIP」でソースコードを落とします。
kmkディレクトリとboot.pyを先程のドライブのルートにコピーします。
PiPi Gherkin用の設定ファイルの導入
40%clubで用意してくれているファイルを利用します。
こちらのcode.pyを先ほど同様にドライブのルートにコピーします。
KMKの更新に追いついていないのかわからないですが、下記のように4行追記をしないとエラーになります。
#PiPi-GHERKIN - Raspberry Pi PICO
import board
from kmk.keys import KC
from kmk.kmk_keyboard import KMKKeyboard
from kmk.matrix import DiodeOrientation
from kmk.hid import HIDModes
from kmk.modules.layers import Layers # ←追加
from kmk.modules.modtap import ModTap # ←追加
gherkin = KMKKeyboard()
gherkin.modules.append(Layers()) # ←追加
gherkin.modules.append(ModTap()) # ←追加
gherkin.col_pins = (board.GP2, board.GP3, board.GP4, board.GP5, board.GP6, board.GP7)
gherkin.row_pins = (board.GP8, board.GP9, board.GP10, board.GP11, board.GP12)
#Rotate gherkin so USB on Right Side. Not needed if USB on Left Side.
gherkin.col_pins = tuple(reversed(gherkin.col_pins))
gherkin.row_pins = tuple(reversed(gherkin.row_pins))
gherkin.diode_orientation = DiodeOrientation.COLUMNS
gherkin.debug_enabled = False
gherkin.keymap = [
[
KC.Q, KC.W, KC.E, KC.R, KC.T, KC.Y, KC.U, KC.I, KC.O, KC.P,
KC.A, KC.S, KC.D, KC.F, KC.G, KC.H, KC.J, KC.K, KC.L, KC.ESC,
KC.MT(KC.Z, KC.LCTRL), KC.MT(KC.X, KC.LALT), KC.LT(3, KC.C), KC.LT(4, KC.V), KC.LT(2, KC.BSPC),
KC.LT(1, KC.SPC), KC.LT(5, KC.B), KC.MT(KC.N, KC.RALT), KC.MT(KC.M, KC.RCTRL), KC.MT(KC.ENT, KC.RSFT),
],
[
KC.N1, KC.N2, KC.N3, KC.N4, KC.N5, KC.N6, KC.N7, KC.N8, KC.N9, KC.N0,
KC.F1, KC.F2, KC.F3, KC.F4, KC.F5, KC.F6, KC.F7, KC.F8, KC.F9, KC.F10,
KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.DEL, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS,
],
[
KC.EXLM, KC.AT, KC.HASH, KC.DLR, KC.PERC, KC.CIRC, KC.AMPR, KC.ASTR, KC.LPRN, KC.RPRN,
KC.F11, KC.F12, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.GRV,
KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS,
],
[
KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.MINS, KC.EQL, KC.LBRC, KC.RBRC, KC.BSLS,
KC.TAB, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.COMM, KC.DOT, KC.SLSH, KC.SCLN, KC.QUOT,
KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.LEFT, KC.DOWN, KC.UP, KC.RGHT,
],
[
KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.UNDS, KC.PLUS, KC.LCBR, KC.RCBR, KC.PIPE,
KC.TAB, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.LABK, KC.RABK, KC.QUES, KC.COLN, KC.DQUO,
KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.HOME, KC.PGDN, KC.PGUP, KC.END,
],
[
KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS,
KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS,
KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS, KC.TRNS,
],
]
if __name__ == '__main__':
gherkin.go(hid_type=HIDModes.USB) #Wired USB enablekmkの変更に伴い修正が必要になる可能性があるので、詳細はドキュメントやコードを参考にしてください。
デバッグ
Pi Picoはシリアルコンソールでエラー出力などを見ることができます。
Macでの接続方法
ls -1 /dev/tty.usbmodem*
# 出てきたやつにscreenなどで接続することができます。
screen /dev/tty.usbmodem1413201接続すると、↓な感じで出力が続いていきます。
ドライブ上のファイルを修正→保存したら自動で再実行されるようで便利でした。
オートリロードがオンです。ファイルをUSB経由で保存するだけで実行できます。REPLに入ると無効化します。
code.py 出力:
トレースバック(最新の呼び出しが末尾):
ファイル "code.py", 行 27, in <module>
ファイル "kmk/keys.py", 行 377, in __getattr__
ValueError: Invalid key
Code done running.
Press any key to enter the REPL. Use CTRL-D to reload.
ソフトリブートキーマップ
30%は未知の領域なので、kmkの勉強しながらぼちぼちセットアップしていこうと思います。QMKはCなのであんまり追えてないですが、Pythonなら読めるはず・・・なので、コードも見ていきたいです。
ケース
ファームウェアが動くようになったので、ケースも作ってみます。
PiPi Gherkinを販売しているTALP KEYBOARDさんがケースデータを無料で公開してくれているので、こちらを利用させてもらいます。
イラレのデータになっているので、svgで書き出してfusion360に取り込み、厚さをつけて3Dデータにして、3Dプリントします。
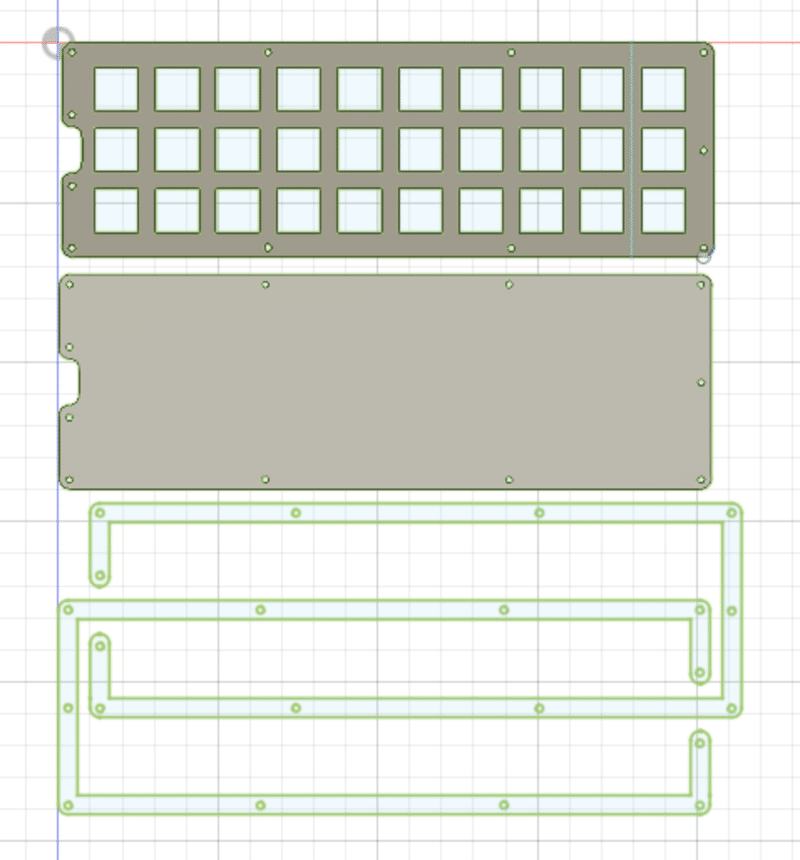
ひとまずトップ、ボトムプレートと12mmスペーサーで組み上げました。ちょっと高さが出てしまうので、Pi Picoをくり抜いた形でサイドも埋めてモデリングしたいですね。

さすがに親指ないと辛いなあという気はしますが、ぼちぼちいじっていきます。
参考
追記:RP2040対応のQMK(非公式)を動かす
せきごんさんが非公式にQMKを動かせるように対応してくれて、PiPi Gherkrin用のファームを作ってくれていたので、試してみました。ファイルを入れるだけで簡単に使え、Remap用のjsonも用意してくれています。
無事、入れるだけで動きました〜! https://t.co/m4zkHV8cB8 pic.twitter.com/MY6Ah3obvF
— ふく🦇自作キーボードのお店をはじめました! (@yfuku_) September 8, 2021
せきごんさんによるQMK対応。公式が対応してくれるまでの暫定対応のようです。
追記:Ruby製PRK Firmwareで動かしてみた
Ruby KaigiでPRKの発表があったようで、興味があってこちらも入れてみました。
KMK同様にUF2ファイルとkeymap用のファイルがあれば動きます。
こちらからUF2ファイルをダウンロードして同様にD&Dで反映させます。
しばらくすると、↓のようにマウントされるので、
↓のkeymap.rbをD&Dしたら使えるようになります。
自作キーボードのオンラインショップをやっています
よかったら覗いてみてください!
この記事が気に入ったらサポートをしてみませんか?