みてわかる電子回路「信号を増幅する」

ここでは信号増幅を数式でしっかりとらえるための準備をしておきましょう。
(ご利用にあたり免責事項をご一読ください)
信号を増幅するための装置
信号は受信されて初めて意味がありますが、時には受信できないほど信号が微弱なこともります。たとえば、教室でマイクを使用せずに話す先生の声は、大きな教室では後ろのほうまで届けるのが難しくなります。「変化のないところ」である空気に、声という「変化」が信号として発信され伝搬しても、それがあまりに微弱だと遠くでは聞こえないということですね。
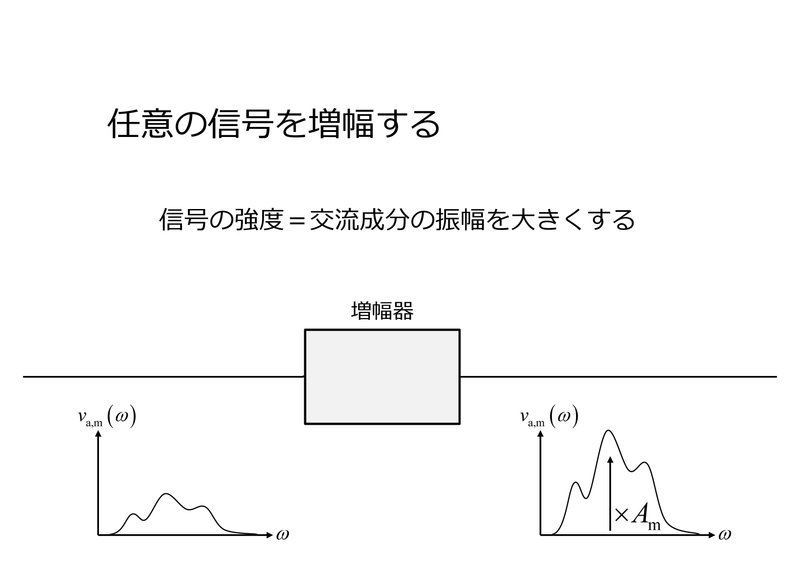
そのようなときには、信号の強度を大きくする必要があります。ここで信号の「強さ」とは、その信号の「振幅」であると考えてもよいでしょう。つまり、信号を増幅するためには、その「変化」の「振幅」を増幅する装置が必要になります。
このような増幅を果たすものを「増幅器」といいます。この増幅器が信号の振幅を$${A_{\rm{m}}}$$倍するのであれば、任意の信号のスペクトルは、その強度が一律で$${A_{\rm{m}}}$$倍されます。ただし、増幅器によって信号スペクトル分布が変化してしまうと元の波形とは異なるものが出力されてしまうので、入力した波形を変えず振幅だけを大きくするには、増幅率はあらゆる周波数において同一でなければなりません。
正弦波を増幅する
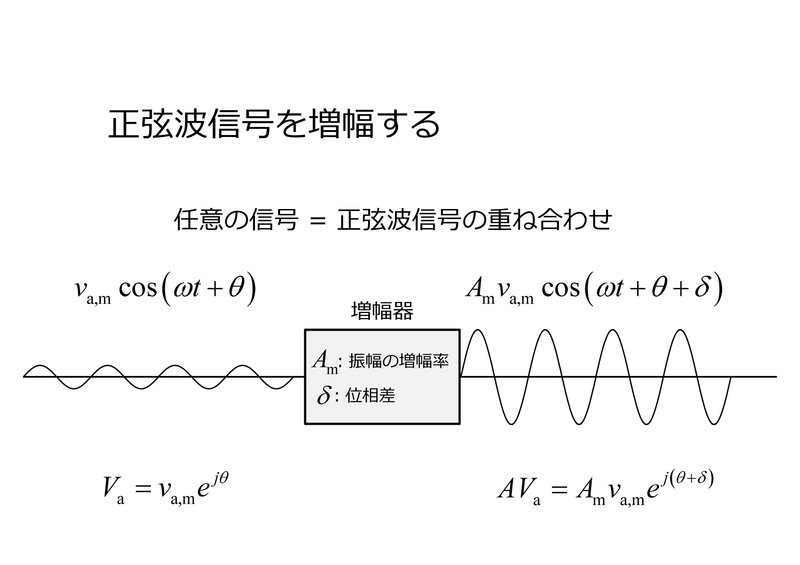
任意の信号は正弦波の重ね合わせなので、増幅器の挙動を考えるときは、ある与えられた周波数の正弦波の振幅が$${A_{\rm{m}}}$$倍されるという場面を想定して解析します。ですが増幅器によっては、振幅が変化するだけでなく、波の位相にズレが生じることもあります。この様子を表すとき、三角関数を用いて表す場合もあれば、複素振幅を用いて表す場合もあります。ですが特に信号の増幅を考察するときは、振幅の倍率と位相差が重要になる場合が多いため、複素振幅を用いるほうが便利です。
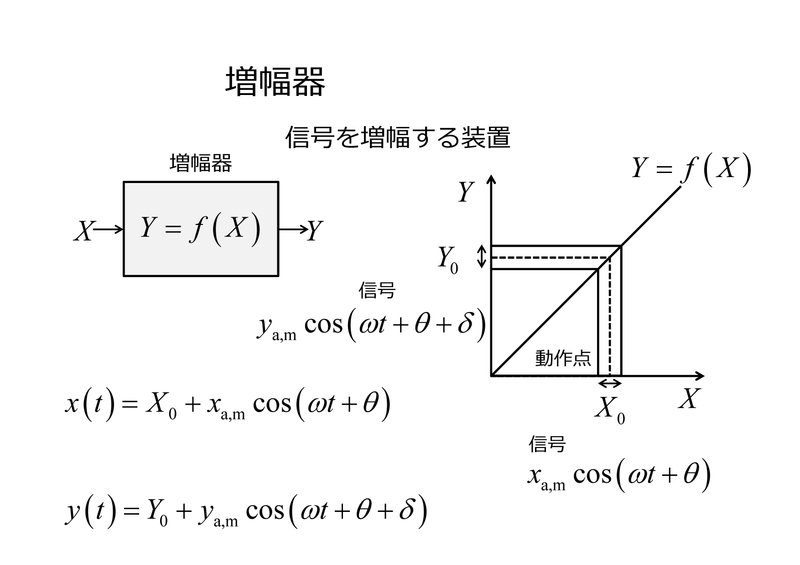
信号の増幅は、入力と出力の関係をもつ装置である「増幅器」によって行われます。ここで増幅器の入力を $${X}$$ とし、出力を$${Y}$$ として、その間の関係が関数 $${Y = f(X)}$$ によって表されるとしましょう。
信号を増幅するときには、まず「変化のないところ」を準備する必要があります。そのために、この増幅器を入力が $${X_0}$$ で出力が $${Y_0 = f(X_0)}$$ となる状態に保ち、じっと動かさずに待機させておきます。つぎにここに「変化」を発生させるために、入力$${X}$$ を $${X_0}$$ 近辺で時間的に変動させます。するとその変動は関数 $${f(X)}$$ によって出力 $${Y}$$ の変動として取り出されます。出力信号 $${Y}$$ の振幅が入力信号 $${X}$$ の振幅よりも大きくなっていれば、その信号は「増幅」されたことになります。
この信号増幅において、「変化のないところ」は回路解析では「動作点」と呼ばれます。この点を初期状態として動作=時間的変化が始まりますよ、という意味です。その動作点を中心として入力が変化するとき、その変化分を「信号」とみなします。
以上から、信号増幅には次の3つの要素が登場します。つまり、
1.増幅器: 入力と出力の関係(入出力特性)を規定する装置
2.動作点: 増幅器を最初にじっと待機させた状態「変化のないところ」
3.信号: そこに発生させる「変化」
増幅の度合いと移相シフトを表す「増幅率」
このような信号増幅において、正弦波の振幅が $${x_{\rm{a,m}}}$$ から $${y_{\rm{a,m}}}$$ になったとしましょう。すると振幅の増幅率 $${A_{\rm{m}}}$$ は、これらの比として定義されます。ここで入力 $${X}$$ と出力 $${Y}$$ の関係が関数 $${f(X)}$$ で表されているため、振幅の増幅率は関数 $${f(X)}$$ の動作点 $${X_0}$$ 近傍での微分(傾き)と関係しそうですよね。具体的には下図中の式によって計算されると考えておきましょう。
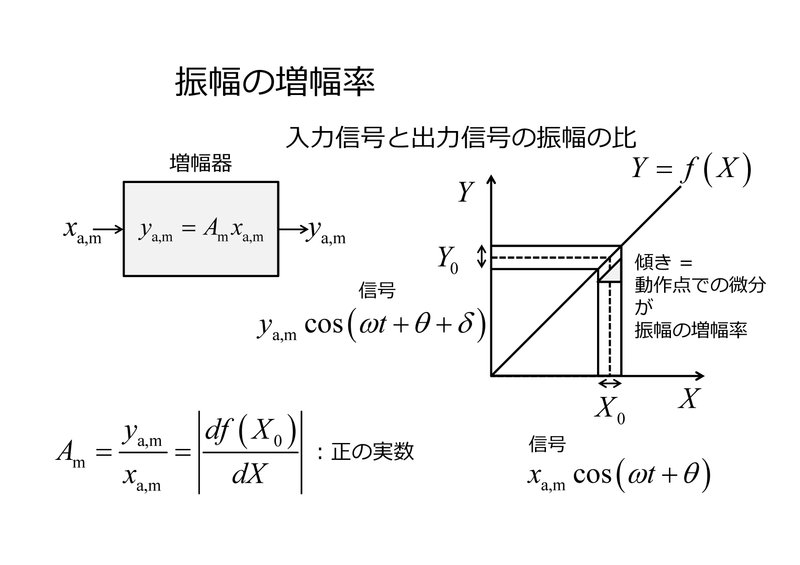
さてここで、増幅器では信号の振幅だけでなく位相も変化することを思い出してください。この位相差の情報を振幅の増幅率の情報と合わせて一気に表示するために、増幅率を「入出力間での複素振幅の比」として定義しなおします。このように定義することで、下図中で示された計算により、振幅の増幅率を大きさとして持ち、増幅前後の位相差分を位相成分としてもつ複素数によって、この増幅器の性質をまとめて表現することができます。
