
㉖(ここをクリック)

ソニーさん、
300メートル先の物体を
15センチ単位で
測定できるセンサーを開発。
何に使われてるの?
クルマの運転支援、
自動運転システムに使われます。
ざっくり言うと、
SPAD
(Single Photon Avalanche Diode)画素
を用いた車載LiDAR(ライダー)向け、
積層型
直接Time of Flight(dToF)方式
の測距センサーを開発。
SPADは、
入射した1つの
光子(フォトン)から、
雪崩のように
電子を増幅させる
「アバランシェ(なだれ)増倍」
を利用する画素構造で、
弱い光でも検出することが可能に。
LiDAR(レーザー照射による測距装置)
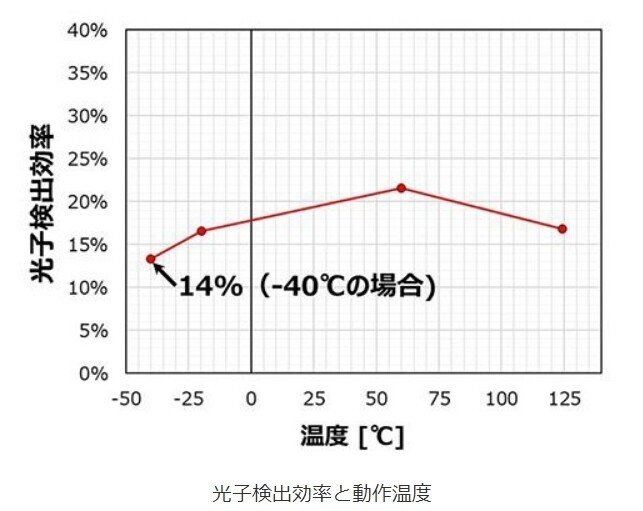
「LiDAR」用のセンサーは、
-40~125℃の温度でも
安定して動作するため、
悪天候などの環境下でも
使えます。
一般的には、
ToF(Time of Flight)方式で
測距します。
ToF(Time of Flight)は、
測位したい物体に光を照射し、
反射光が戻ってくるまでの
『時間』をもとに距離を測ります。
ToF(Time of Flight)方式は、
測定方法によって
①間接方式(インダイレクトToF,iToF)
②直接方式(ダイレクトToF,dToF)
があります。
このうちクルマ向け
長距離LiDAR(ライダー)で
多用されるのがdToF。
ざっくり言うと、
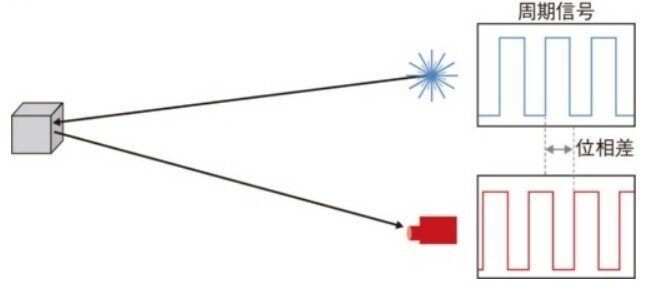
iToF方式は、
周期信号の
『位相差』から距離を推定。
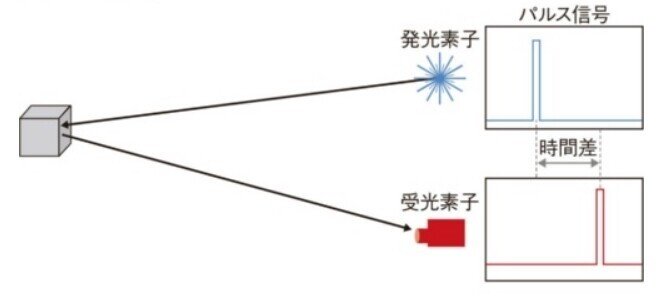
dToF方式は、
パルス信号が往復に要する
『時間を直接』測定し、
距離を推定。
具体的には、
iToF方式は、
周期的に点滅する光を用いて、
その光が対象物との間を往復するときの
「時間おくれ」を『位相差』として検出します。
dToF方式は、
短時間発光する光パルスを対象部に照射し、
その反射光がToFセンサーに
届くまでの『時間』を実測します。
ソニーさんは、
直接ToF向けの光検出器として
高感度なSPAD画素を試作。
SPAD画素を2次元に配列して
距離画像を取得します。
SPAD(Single Photon Avalanche Diode)は、
APDの一種です。
APD(アバランシェフォトダイオード)
「avalanche photodiode」の略。
通常のフォトダイオードでは、
1光子から1電子を生成します。
APD
(アバランシェフォトダイオード)
では、
1光子から生成した
1電子に強い電界を印加することで
物質中のほかの電子と強く衝突し、
1個の電子が生成します。
この衝突は、
アバランシェ(なだれ)のように
初期の衝突をトリガー(きっかけ)
として次々に大きくなりつつ繰り返され、
最終的には電子が1万倍以上に『倍増』します。
ことばの意味は?
・印加
電気回路に電源や別の回路から
電圧や信号を与えること。
・フォトダイオード
光センサー(光検出器)の一部。
光半導体素子のPN接合部に
光を照射すると電流や電圧が発生します。
→太陽電池もフォトダイオードの1種。
フォトダイオードは、
構造的には一般のダイオードと同様の構造で、
P型半導体とN型半導体のPN接合で構成。
・ダイオードは、
P型半導体とN型半導体が接合されて
構成されてます。
それぞれの側から1本ずつ電極が伸びており、
P型半導体から伸びている電極は「アノード」
N型半導体から伸びている電極は「カソード」
と呼ばれてます。
電流は、
「アノード」→「カソード」
の方向にのみ流れます。
この性質を利用して、
ダイオードは整流回路などに使われてます。
ざっくり言うと、
ダイオードは
電気の流れを『一方通行』にする電子部品。
こうして、
SPAD画素を
対象物までの距離を測定する
dToF方式の光検出器として用いることで、
長距離かつ高精度な距離測定が可能に。
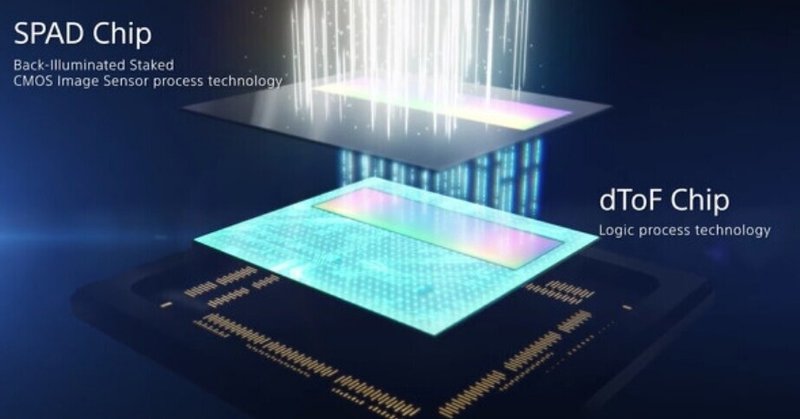
この開発品は、
画素チップとロジックチップを
積層する際に、
Cu(銅)のパッド同士を接続することで
電気的導通を図る技術です。
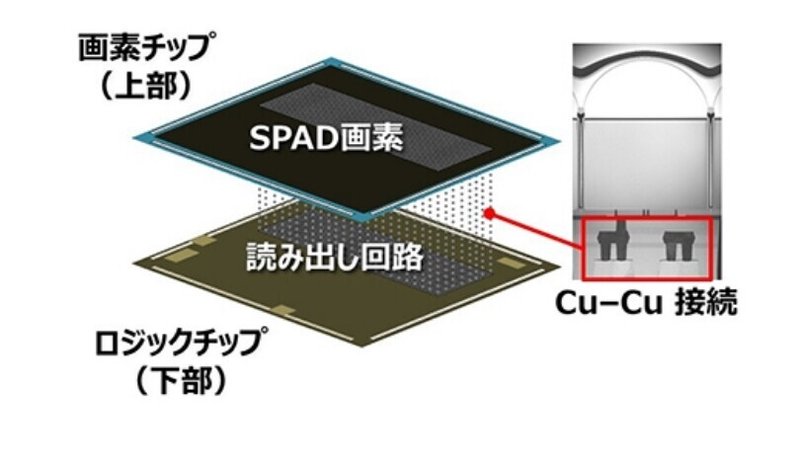
具体的には、
裏面照射型の
「SPAD画素」構造を用いた画素チップと
「測距処理」回路などを搭載したロジックチップを、
Cu-Cu接続を用いて1画素ごとに導通。
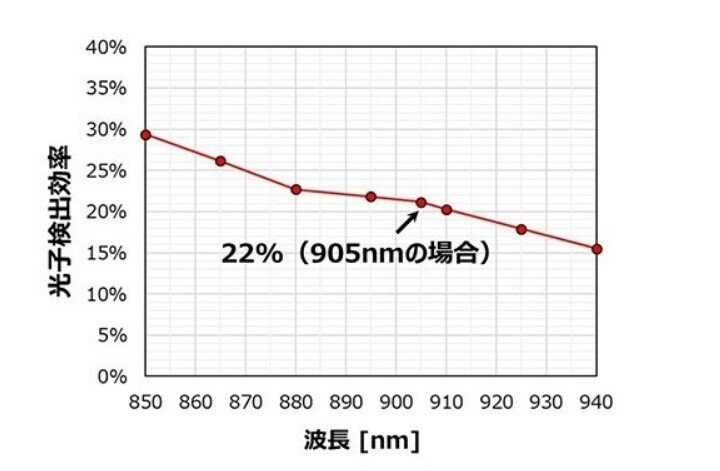
光を取り込む画素以外の回路部を
下部に配置し開口率を高め、
22%の高い光子検出効率を実現してます。
Cu-Cu接続ってなに?
画素チップと論理回路チップを
それぞれの積層面に形成した
Cu(銅)端子で『直接』接続したもの。
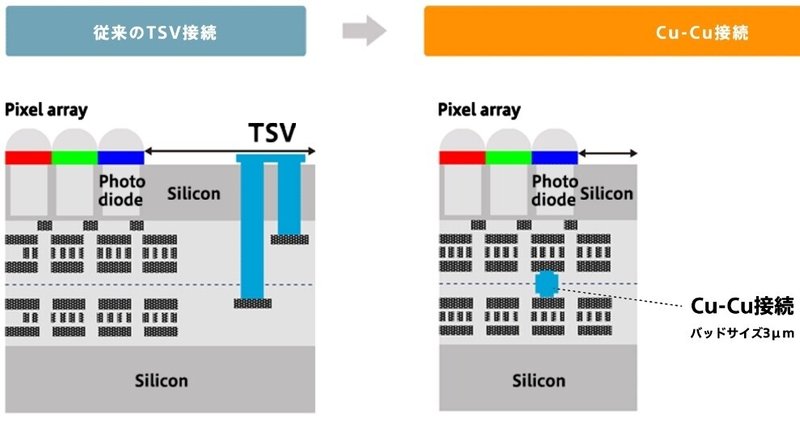
接続の専用領域が不要となるため、
さらなる小型化と生産性向上が可能に。
何が言いたかったの?
『SPAD測距センサー!』
弱い光を検出できる
「SPAD画素」で反射光を検出することで、
測定精度を向上。
測定した時間をデータに変換する
コンバータ(変換器)も独自開発。
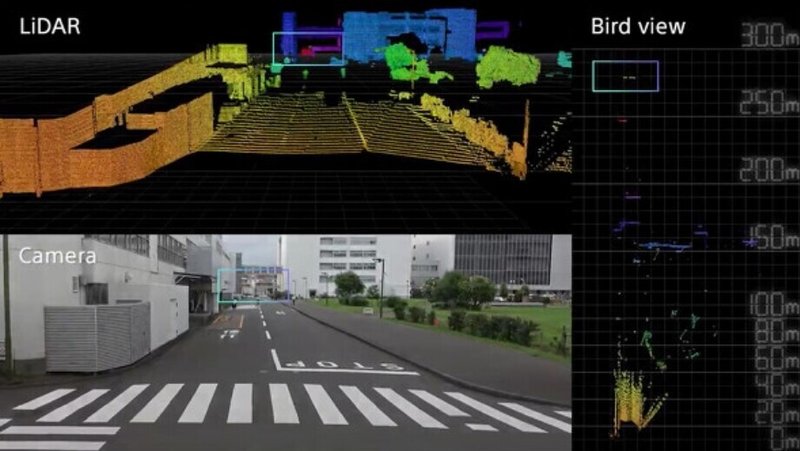
センサーと併用することで、
自動運転中にクルマが周囲の状況を
リアルタイムに認識しながら
走行する仕組みを実現しました。
ちなみに、

視力11.0は、
55メートル先から
1.45ミリの切れ目を認識できます。
→パスタ麺を数えられる。
ソニーさん、

人類の限界まで、あといっぽ.
読んでくださり、ありがとうございました。