
Pickup用自動コイル巻き機の制作

Pickupは簡単にいうと発電機のようなものだ。コイルの前で磁石を動かすとコイルに電流が発生する。モーターはその逆に、コイルに電流を流すと磁力線が発生して磁石を動かす。(注:モーターにも色々な種類があるので全てがそうであるわけではない)
Pickupの場合、動くのは上部の「弦」である。磁石ではない「弦」がコイルの前で動いても電流は発生しないので、コアに磁石(あるいは磁力を帯びさせた鉄芯)を入れて、弦に帯磁させて「磁石」の代わりとする。市販されているエレキギター用には様々なメーカーからいろんなPickupが市販されているが、Chapman Stickの場合、特殊な構造のために丁度いいものがない。そこでコイルも自分で巻くことにしたのだが、手巻きで数千回は非効率かつ仕上がりが整わないので自動コイル巻き機を作ることにした。
構造としては巻き取る部分と巻線を均等になるように移動する部分、およびそれらのコントローラである。巻き取るのは回転回数を把握しやすいステッピングモーター、線の移動にはサーボのアームを利用するのが簡単だ。それらをArduinoで動かす。プロが設計するなら「通常のモーターにセンサーで回転した数を検知、線の移動にはリニアのアクチュエーターやモーターで上下させる機構にセンサー付けて」というのが定石だと思うが、常にセンサーを監視したり面倒なので素人設計で試す。試しなので巻き数、アームの角度はプログラム内に書き込んだ。というのも、普通のArduinoで使えるデジタル入出力が12本、その内6本がディスプレイ部に使用され、モーターに4本、サーボに1本で11本も使ってしまう。残り1本では巻き数やアームの角度を設定するボタンが付けられない。そこで最後の1本はStart/Stopのスイッチに使い、巻き数などはプログラム内に書き込むことにした。
モーターなどの固定具(フレーム)は3Dプリントで簡単に作成したが、こういう試作には本当に重宝する。


いざ試運転で、コイルのボビンも3Dプリントで簡単に作り、巻いてみたところ、思いの外きれいに巻ける。巻線はウレタン線の極細のもの。髪の毛より細いので巻く時のテンションも気になったが、切れずに巻けたのでよしとする。これでいくつか巻いてみた。

問題は途中でアームの角度や巻き数を調整できないところで、そこが次の解決すべき点になった。
やはり一番の問題はディスプレイである。このディスプレイはプログラムも簡単で便利だが、12本の線の内、6本を使ってしまう。他に良いディスプレイは無いか探したところ、i2Cで繋げられるユニットを見つけた。これなら使っていないアナログライン2本で表示できるので6本丸ごと別の用途に使える。この6本をアームの上限の数値▲▼、下限の数値▲▼、巻き数設定の▲▼に振り分ければ丁度収まる。まずはコントローラの方をユニバーサル基板で作成。今回は量産するわけではないので、線は半田付けで一本ずつ付ける。んー、面倒臭いがしょうがない。
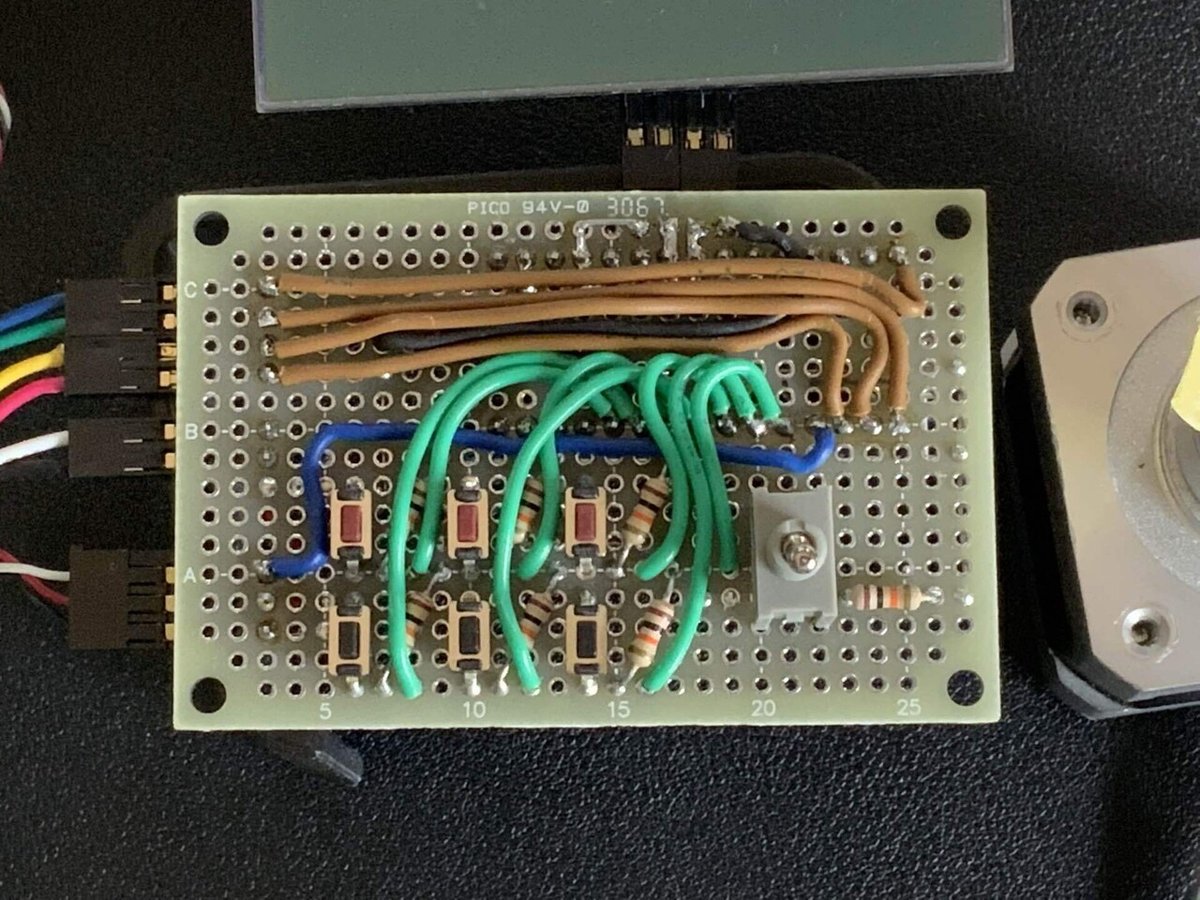
プログラムも新たに書き直した。設定するモードと実行モードに分け、それぞれのモードでの表示を決めた。i2Cでの表示はちょっと面倒だが、サンプルを参考に何とか出来た。モーターとサーボを接続し、上手く働くことを確認して形の検討に入る。


前の試作ではモーターやサーボの位置を固定にしたが、様々なコイルに対応するためにある程度調整可能な機構にする。その分設計が複雑になるが、やってみる。スライド可能なレール状の機構を作るが、問題は噛み合わせだ。これには3Dプリントの精度も関係してくるので、作って試すしかない。案の定、最初のパーツはキツ過ぎた。データを調整して出力。うーん、ちょっと緩いけど動くから許す。ここがアマチュアなところ。動けば良しだ。前作のモーターは大き目で重かったので、それだけで安定したのだが、今回は別の小さ目のもの。巻線の重さに負けて倒れてしまうので、今回は足を付けた。


サーボのケーブルが少し短いので、いずれ中継ケーブルを作るつもりである。今回のPickupは10,000回巻きが一つの目標である。一般的なストラトキャスターのシングルコイルだと8,000〜9,000くらいだと思うのでその辺りで限界を目指す。ただ、巻き数が増えると高音が抑えられるという情報もあるので、その辺りも今後の検討課題になる。
早速本番のコイルを2つ巻いてみた。
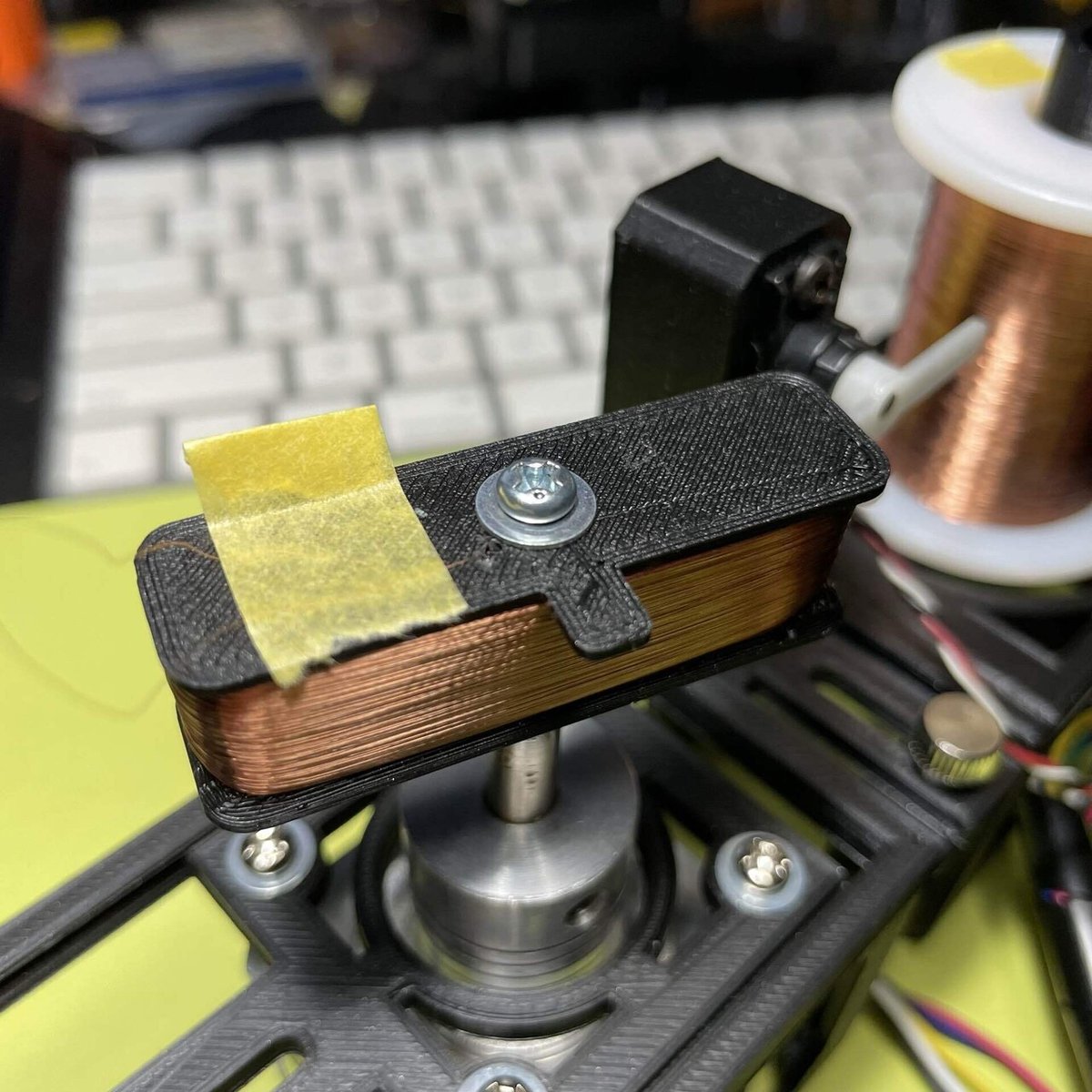
ほぼ問題なく10,000回巻けたので、これでコイル巻き機は完成とする。コイルはこの後パラフィンで固める必要あるが、それはまた次回以降に書き記すつもり。
この記事が気に入ったらサポートをしてみませんか?