新・コイル巻き機の制作(1)

DividedPickupとそれを使った表現については少し横に置いといて、ピックアップ用のコイルを巻く装置を新たに制作する。既に2機の試作を行い、概ね使えるのではあるが元々少し気になっているところがあり、この際新しく作ることにした。
●解決したい問題
問題となっている部分は、銅線を巻きながら軸に沿って振っていく部分で、簡単に済ますためにサーボモータのアームを使っていたが通常のサーボモータは回転運動なので、両端が中央部分に対して少し詰まってしまう欠点があった。
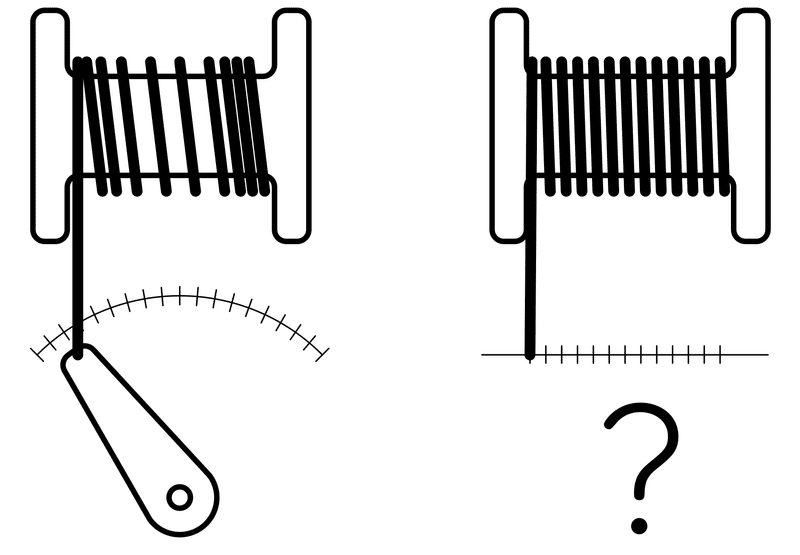
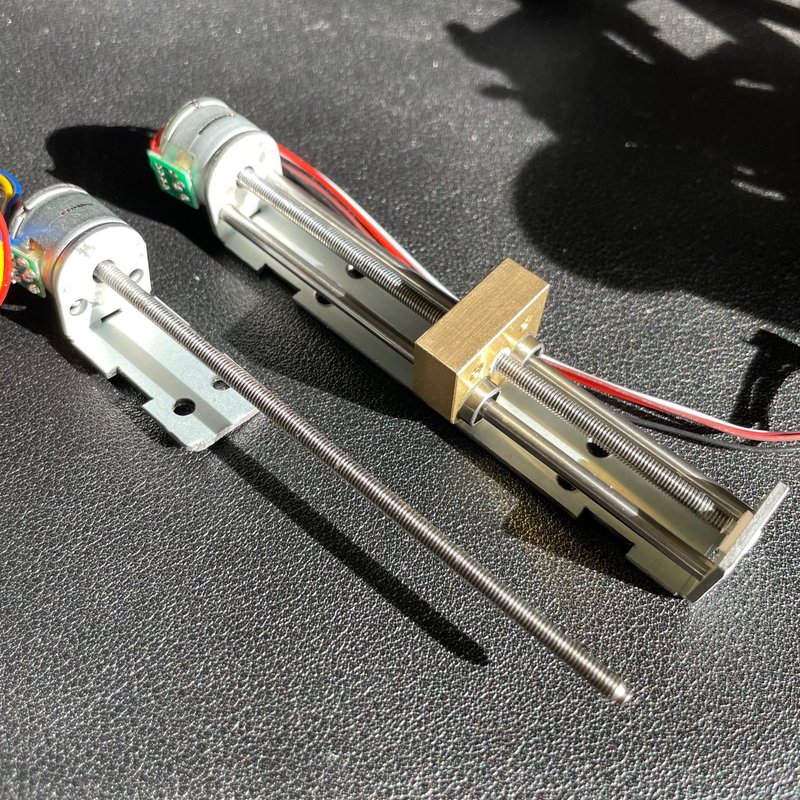
できれば綺麗に巻くために等間隔で動くようにしたいと思っていたが、簡単に(お金をかけずに)実現する方法が見つからなかった。ある日、Amazonを覗いていて、サイズ的にも価格的にもちょうど良いユニットを見つけた。小さいステッピングモータの軸にネジ棒が付いていて、リニアに何かを動かせるもの。大型のものは3Dプリントなどに使われているが、そんな大層なものでなくても良い。価格も数千円なので購入しやすい。一つは巻取り用に、もう一つはリニア移動用に購入。
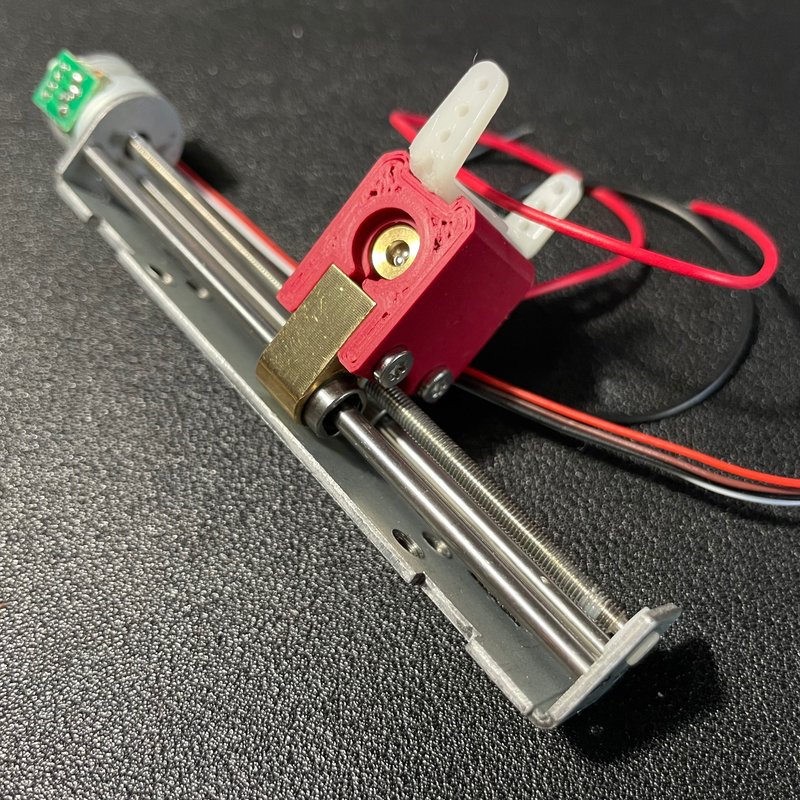
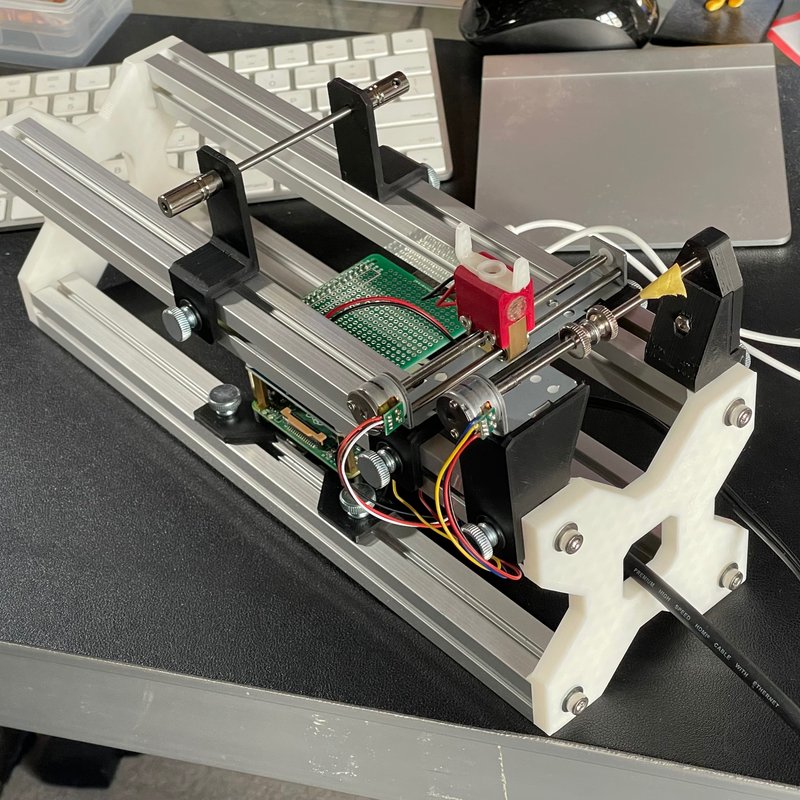
●いざ工作と設計
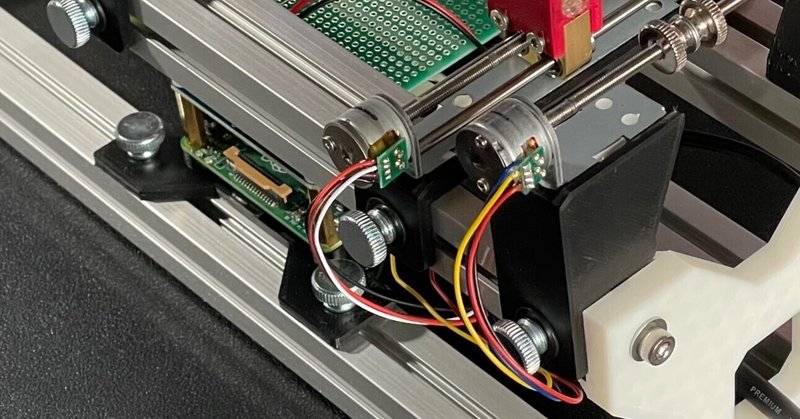
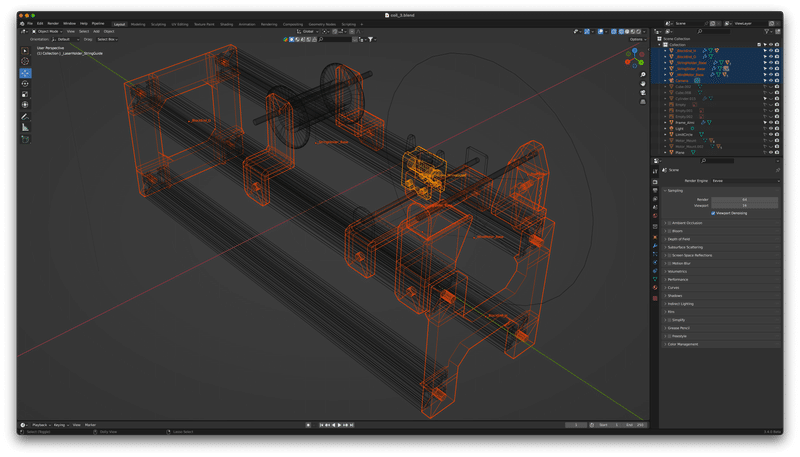
巻取り用は単に回転するだけでいいので、不要なパーツを削除する。これらを使って設計に入る。図面がないので、部品のサイズを測って設計するしかないのだ。全体のフレームは前に別の用途で購入してあったアルミのフレーム。パーツ類のサイズをもとにBlenderで直接モデリングをしていく。この方法の良いところは、必要なパーツ類を直接STLに書き出して3Dプリントできるので、試作が早い。


この時点での懸念材料として、このモーターはちゃんと動くのか?という点で、データが少ない(Amazonに載ってるだけ)なので正しいかもわからない。まあとりあえず進めてみる。今回のコントローラはRaspberryPiを使うことにした。できれば画面をタッチして設定などを変えられる様にと考えたからだが、モータードライバとの併用は難しそうなので、物理的なボタンを使うことにした。
●モータードライバ
モータードライバは正月明けに届く様だったので、しばし作業はお預け。正月明けに帰宅するといくつかパーツが届いていた。モータードライバはArduinoでいうシールド、RaspberryPiの場合はHATというらしい。装着してサンプルプログラムをダウンロードする。モーターのコネクタの形が異なっていたので汎用のものに変えた。つないで動かしてみる。あれ、動かんな。別のモータを繋いでも動きが変。バイポーラなので線は4本。順番が違う様だ。よく見ると基板上に書かれている文字の順番が違う。普通ならA1-A2-B1-B2とかA1-B1-A2-B2とかなのだが、A2-A1-B1-B2となっている。
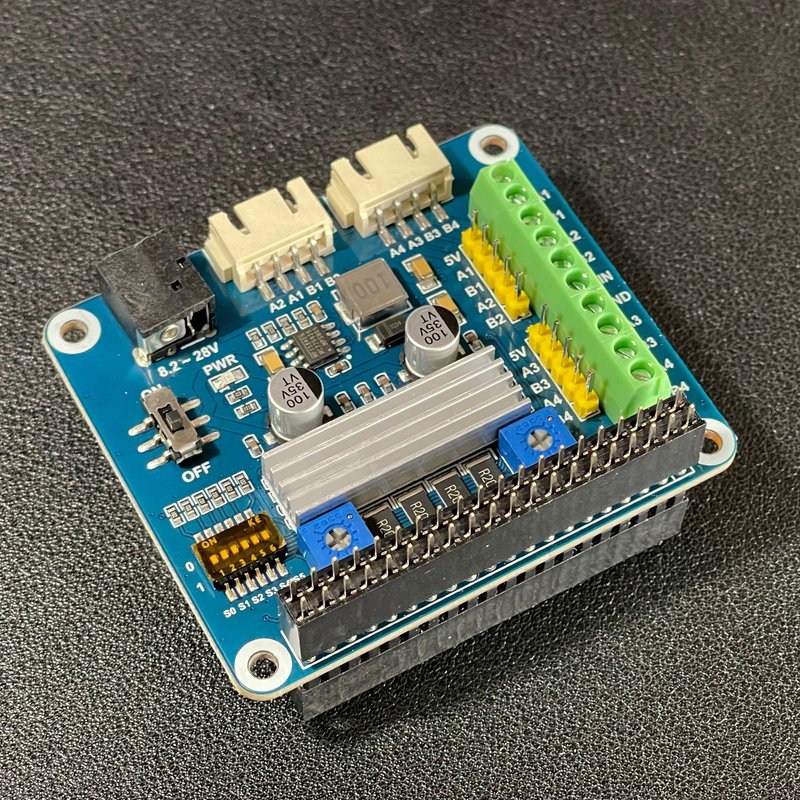
あちゃー、順番違うわ。ステッピングモータは正しい順番で信号を送らないと回ってくれない。直して試すと動いた!通常200ステップで一回転するのだが、なぜか640ステップにしないと一回転しない。ちょっと原因不明だが、640で回るからいいや。
●レーザー
リニアに動かすヘッド部分には銅線を通す部分とレーザーを仕込むパーツを作る。このレーザーは最初の位置決めの照準として想定している。(有効かどうかはわからない)
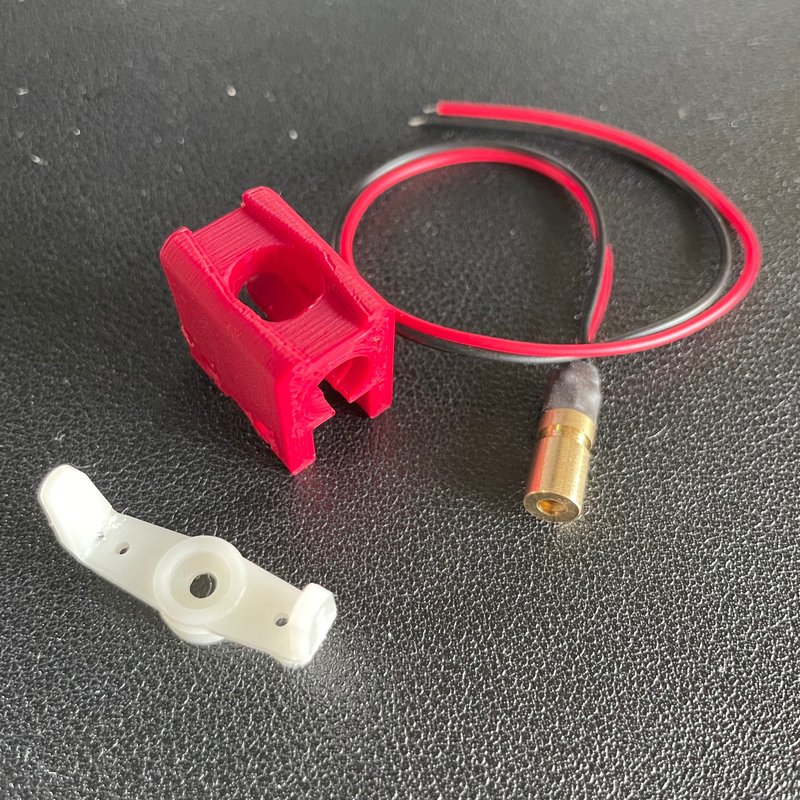
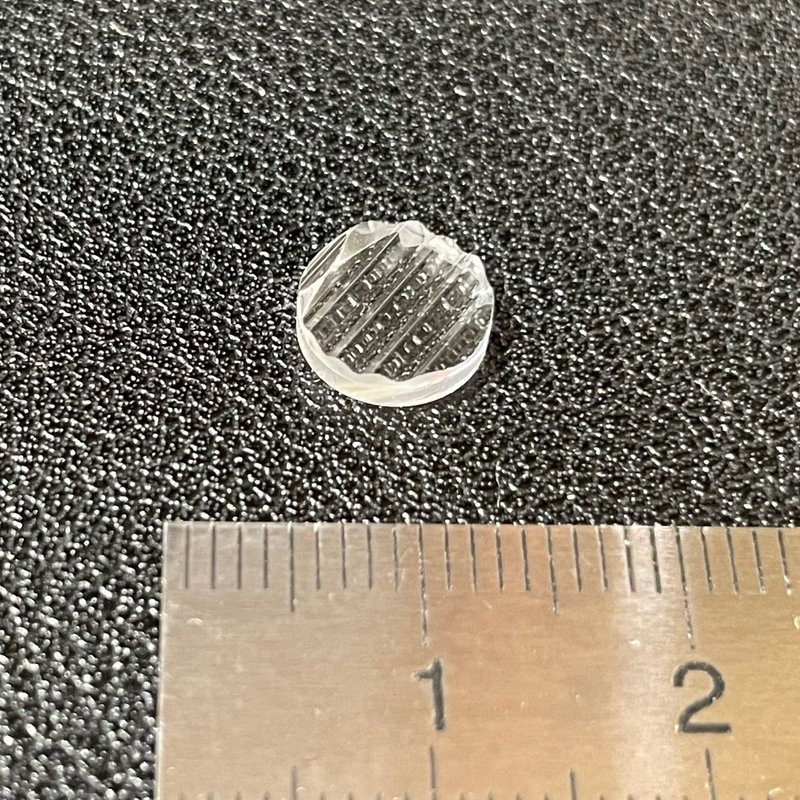
レーザーの前の窪みは、レンズが入る。このレンズはビームを縦線に変えるものでレーザー水準器などに使われるもの。AliEpressで見つけた。念の為に45度と60度の2種類を購入したが、45度で良さそうだ。想定としては、設定時にコイルを巻く部分の片方の端をレーザーの位置で決め、移動して反対の端を決める。実際に巻く時はレーザーはオフにする。
●リミットスイッチ問題
モーターが動くことは確認できたので次の段階、コントロールソフトのプログラムに入るのだが、一つパーツが必要なことに気がついた。それはこの手の機械には必要なリミットスイッチである。単に回転するものはいいのだが、リニアに動くとなると何か意図しない誤作動で限界を超えてしまったり、最初にリセットするためにそのスイッチのところまで動かす様な時に使う。簡単なスイッチだが需要な部品である。手持ちに使えそうなスイッチがなかったので、続きはその辺りから。
この記事が気に入ったらサポートをしてみませんか?