
かわロボの脚周りの話

というわけでアドベントカレンダーで書くと宣言していたかわロボの脚周りの話です。
かわロボ(Aリング) Advent Calendar 2023 - Adventar
機体構成やコンセプトによって求めるところが違いますが、個人的に気にしていることをふわっと書きます。
こんな考え方もあるな…ぐらいに思っておいてください。
サスペンションとか車体サイズはそれだけでもボリュームがあるので必要最低限に。脚の軌跡については、人によって宗派があるので触れません。(素)
前段:かわロボの脚
このnoteを見ているのはかわロボ参加者だと思うので、細かい規則は割愛します。競技規則は下記の通り。
脚機構は、往復運動を行う部位を接地部として、リンク機構を用いて移動する様設計されていること。また、接地部を有する部品がリンク機構に組み込まれている事。
軌跡の話は宗教があるので触れませんが、昔公式が出していた資料がこちら。(このnoteの書きなぐりよりも)参考になるので、気になる人は見ておくといいと思います。
https://kawasaki-sanshinkaikan.jp/robo_old/robo13/uploads/2013/04/doujo03-1.pdf
個人的に脚周りに求めたもの
サイズや重量の制約があるので、機体コンセプトによって脚周りに割けるリースが変わってくると思います。
メインで使っているミドルロッドの例に書いていこうと思います。
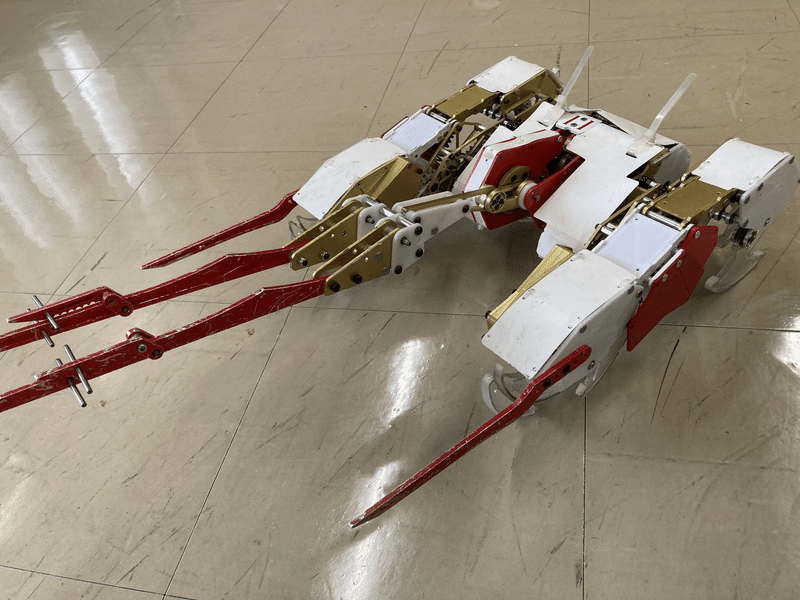
同種の機体を何台も作り改修を重ねた結果この形になっていますが、"走り回る小型機を滅ぼしたい"(主に氷タイプの某氏)というのが大元にあります。
中央に大きい山がある公式リングで縦横無尽に駆け回る小型機を追い回すのはとっても大変面倒です。そこで脚周りを重視して改修を進めていきました。
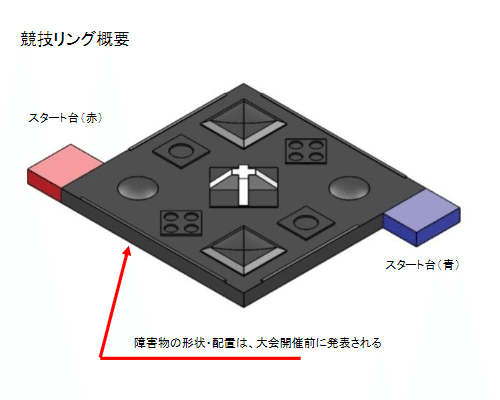
(HPより抜粋:https://kawasaki-sanshinkaikan.jp/robo/28th/battle/rule.html)
設計にあたり特に重視したのは下記です。
①リング内をストレスなく走り回れること
・ 障害物の影響が小さいこと
⇒車体サイズ(特にホイールベース)の最適化
⇒サスペンションの搭載による障害物への追従性向上
②脚周りの効率の向上
・ 脚リンク部のがたつきの抑制
・ 動力伝達の効率向上
③ユニットとしての信頼性が高いこと
・ 簡単には壊れないこと⇒部品点数減らすこと
(試合中だけでなく、練習量が増えた場合も見込んで。)
・ 簡単に修理や部品交換ができるようにすること。
(練習量や修理のやる気に直結するのでとっても重要)
車体構成について
かなり沼が深い項目なので簡単に…
車体サイズ
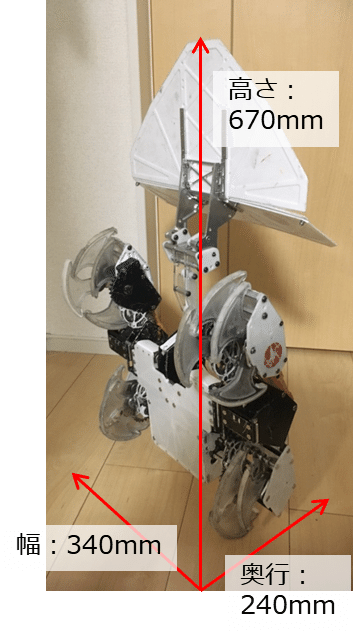
かわロボにおいてはスタート姿勢(250mm×350mm×700mm)に収めるためになんとなくサイズが決まってしまいますが、ざっくり以下のような性能に影響してきます。
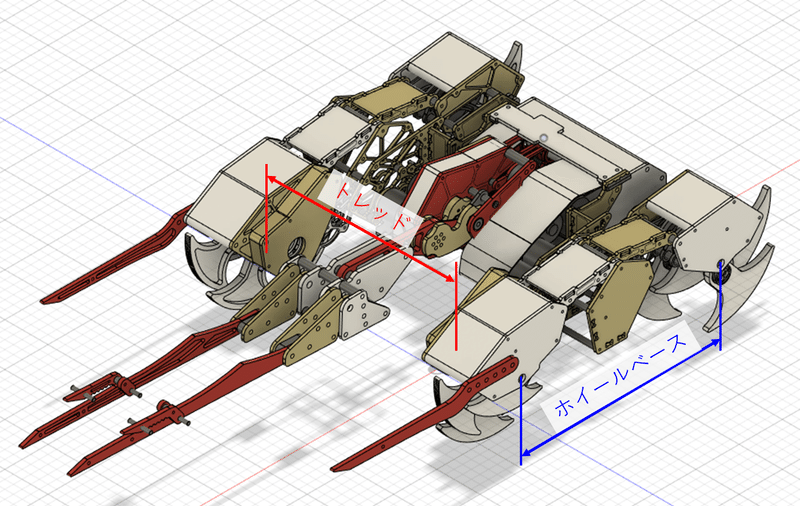
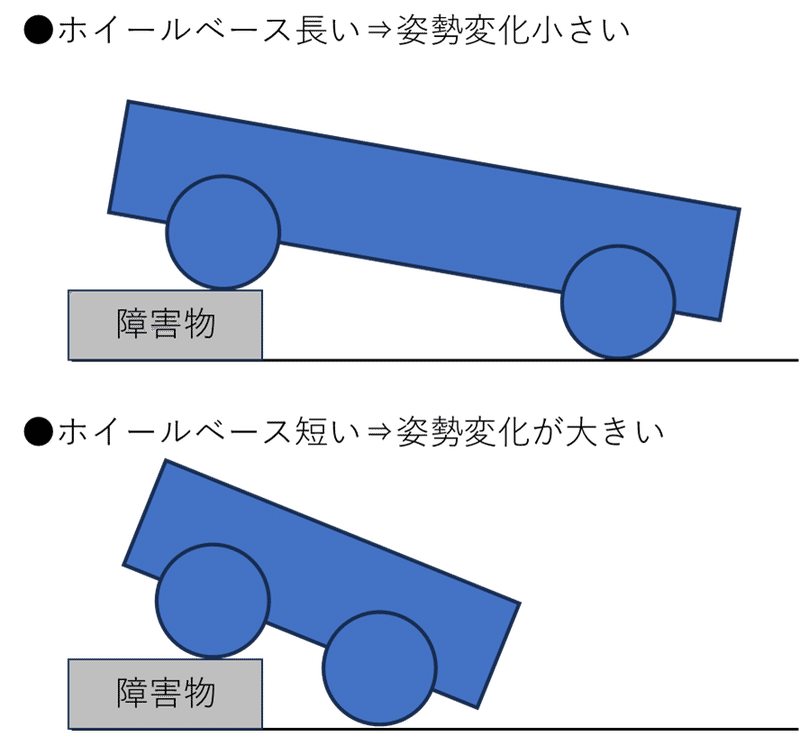
●ホイールベース:前後の脚ユニットの距離
障害物に乗り上げた際の車体の傾きに影響します。
距離が長い程障害物に乗り上げたときの姿勢変化が小さい(=走行面で有利)ですが、車体が大きくなるので単純に重量増やトレッドとの比率で旋回性能に影響してきます。
私の場合は220mm⇒240mm…ときて最終的に230mmで落ち着いています。
(機体の重心位置や操縦の好みによって変わってきますが。)
●トレッド:車だと左右のタイヤ接地面の中心間距離
(かわロボにおけるトレッドって中心でいいのか微妙…)
ホイールベースと同様に障害物に乗り上げたときの姿勢変化に影響します。
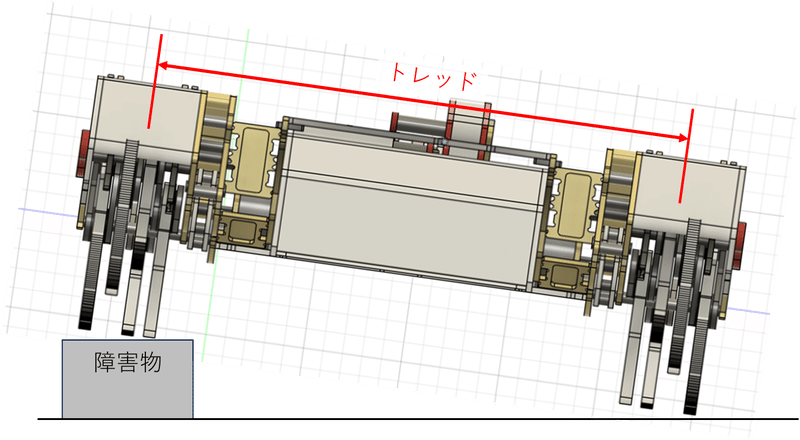
また、ホイールベースとの比率で車体の旋回性能に影響してきます。
脚ユニットの配置の中央起点で回転すると考えると、ホイールベースに対するトレッドの比率が大きい程曲がりやすくなります。(ある程度は車体の重心位置や操縦でカバーできますが。)
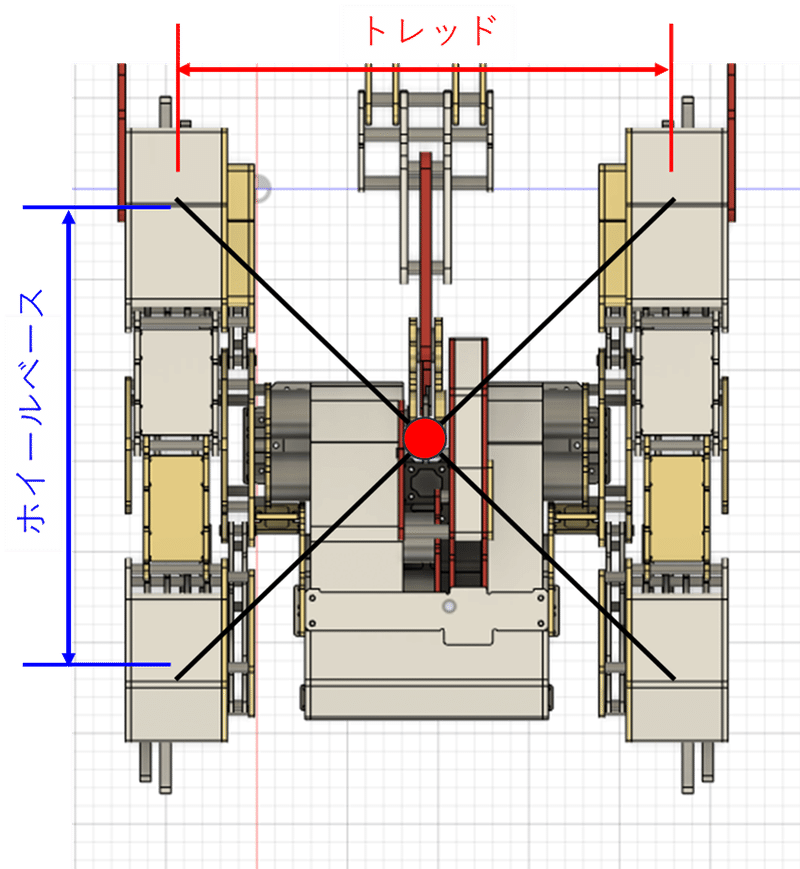
結局は好みですが車体幅いっぱい(350mm)で作ると公式リングだと走りにくい(中央の山が邪魔)ので、私の場合は一回り小さめにしています。
スタート姿勢=車体サイズである小型機の場合はサイズに制約がありますが、いわゆる転倒スタートの場合にはある程度設計自由度が確保できます。
車体が大きいほうが障害物に対して有利であることと、脚ユニットを大きくしたかったこともあり、転倒スタートにしています。
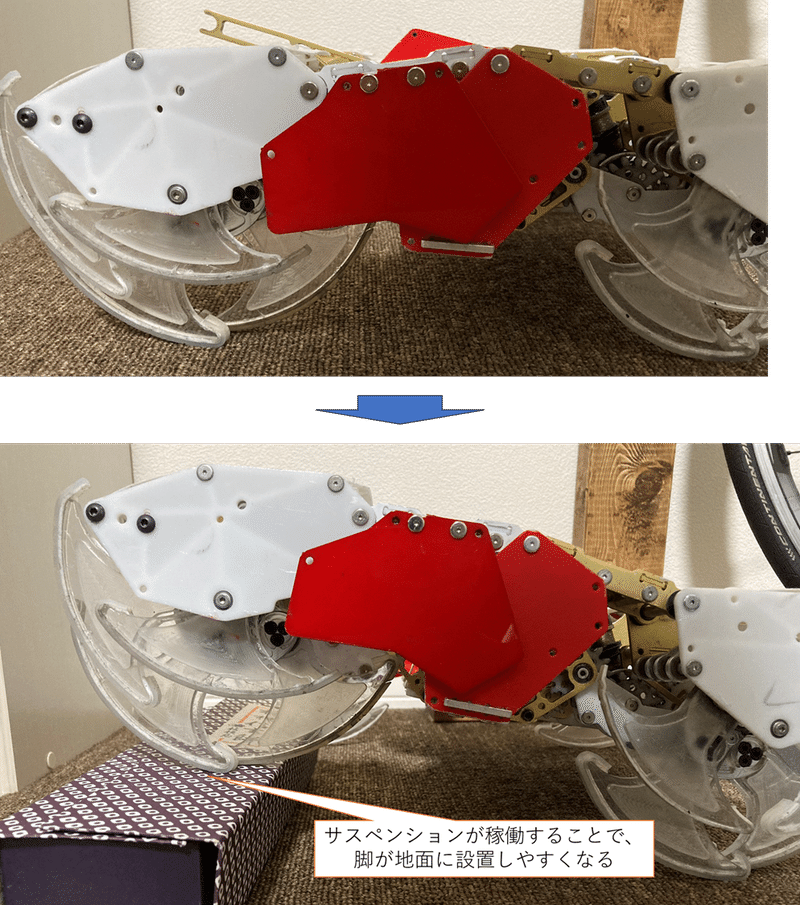
サスペンション
不整地であるリングで戦うかわロボにおいて、機動性を重視する場合には必須だと思っています。
真面目に書くとここだけで長くなるのでさらっと。
ざっくりとしたメリットとデメリットは下記。
メリット
・障害物に乗り上げた際でも、すべての脚ユニットが地面に設置しやすい
⇒安定して走行できるようになる。
・衝撃や脚の振動を抑える
・アームを上げた際の反動を抑えることができる。
サスペンションの構成や配置によっては、カウンターを早く機能させることも可能。
・(かっこいい!)
デメリット
・設計難易度が上がる。(構造が複雑になる)
・部品点数が増えるため重量面で不利。
脚性能優先で設計していったときに、メリット>>>デメリットだったので、搭載しています。
脚ユニットの構成について
脚機構動作
脚機構はかわロボにおいてはメジャーな四節リンク機構を使用しています。
動作イメージは下記。(エントリーシートが初めて役に立った気がする。)
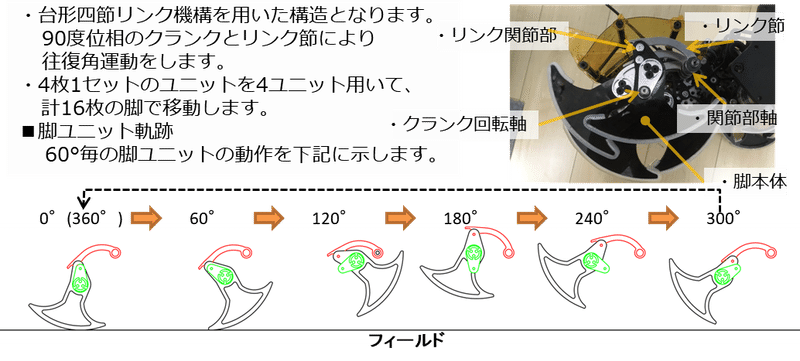
90°位相にしていることもあいまって、見ての通り部品点数が多い機構です。
がたつきが大きいと動作させたときに振動し効率が悪くなります。
かと言って全部にベアリング入れたりすると重量増+保持が大変なので、がたつきの抑制と組みやすさ(メンテナンス性)のバランスを見て以下のような構成にしています。
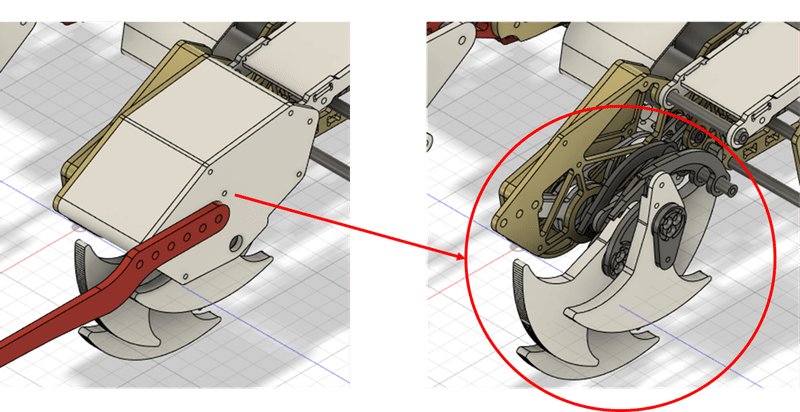
実際の構造
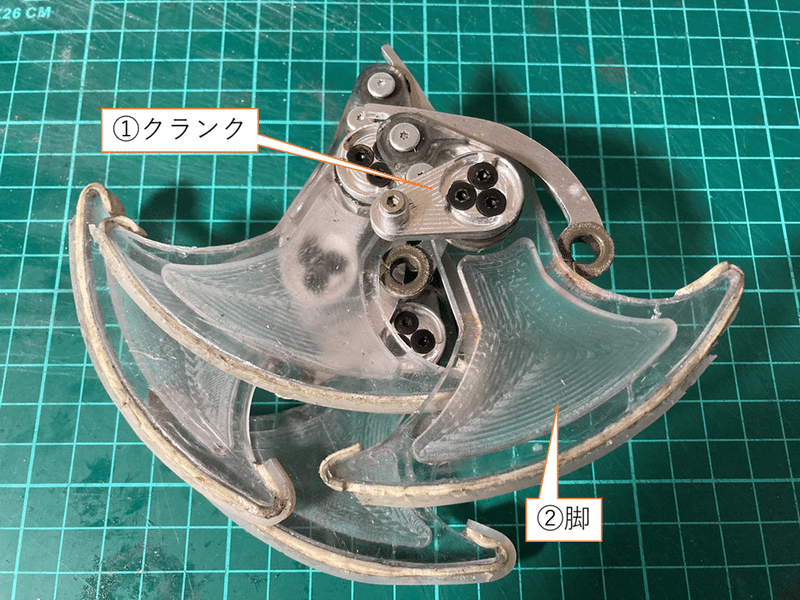
部品点数多くて面倒ですね。
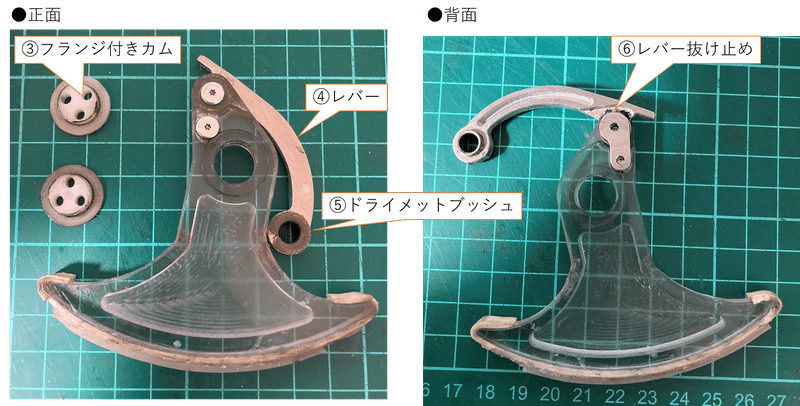
個人的なポイントは③と⑤です。
③はフランジ付きでカムを削りだすことによって部品点数を少なくしています。昔はシムを入れて脚とクランクの隙間を調整していましたが、組むのが面倒なので一体にして整備性を上げています。(ベアリング等入れてもいいのですが、重量増+部品増えて面倒なので見送り中です。)
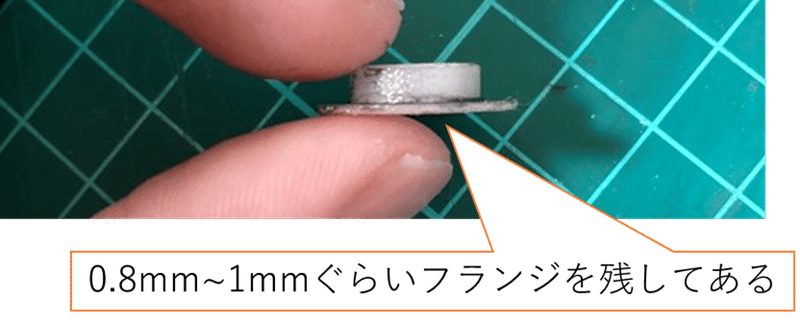
⑤は結構重要です。ここのがたつきを小さくすると振動激減します。
昔はオイレスブッシュ入れていたのですが、使い込んでいると削れてくる+抜けてくるので現在はドライメットブッシュを入れています。
写真は肉厚1mmですが、現在は肉厚0.5mmを使用しています。
ドライメットLF(t0.5) オイレス工業 オイルレスブッシュ 【通販モノタロウ】 (monotaro.com)
ちなみに、各部品の接触部はグリスアップして摩擦を小さくしています。
こんな構造でも割と故障率低くて、整備さえさぼらなければあんまり壊れません。
本当はクランクを止めている皿ねじも低頭ねじ等にして加工減らしたいのですが、箱で買ったねじが残っているので見送り中…
脚の伝達系と減速機について
脚機構そのものよりもこっちの方が重要だったり。
伝達系の話
サスペンションを組むにあたって、配置の自由度が必要となったためギアトレインで動力を伝達しています。(例によって部品点数が増えて面倒ですね。)
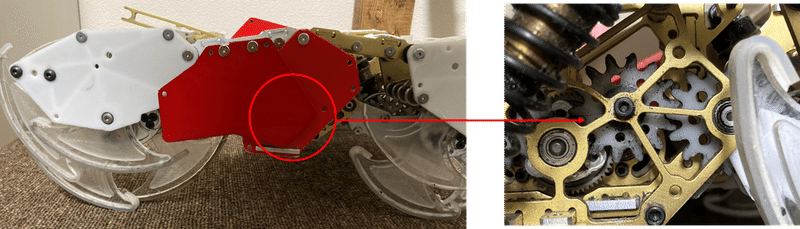
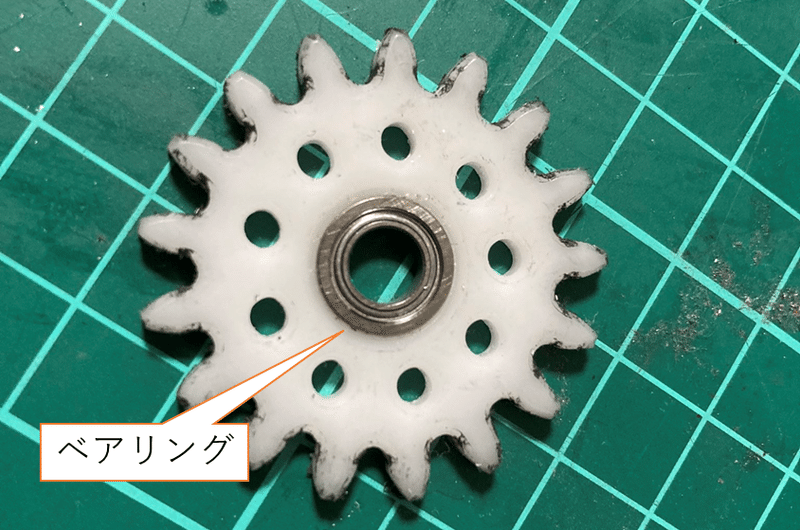
かみ合い…とかの話は専門家に任せるとして、がたつきは小さいほうがいいです。今はベアリングを入れるようにしています。
昔はオイレスを使用していましたが、使用しているうちに削れてがたが大きくなっていくので。
ちなみに最近は軽いのと切削時間がかからないということでジュラコンで作っていますが、重量が許すのであれば個人的にはアルミ等で剛性高くした方がいい気がしています。
剛性低いと前後に動かした際に歯がたわんでいる感じがして気持ち悪い…
減速機の話
昔はタミヤのギヤードモータを使用していましたが、重量、単価、設計自由度の関係で最近は自分で減速機を組んでいます。
タミヤのギヤードモーター | タミヤ (tamiya.com)
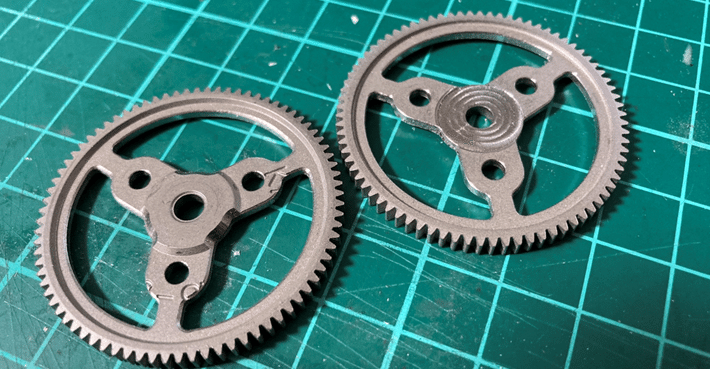
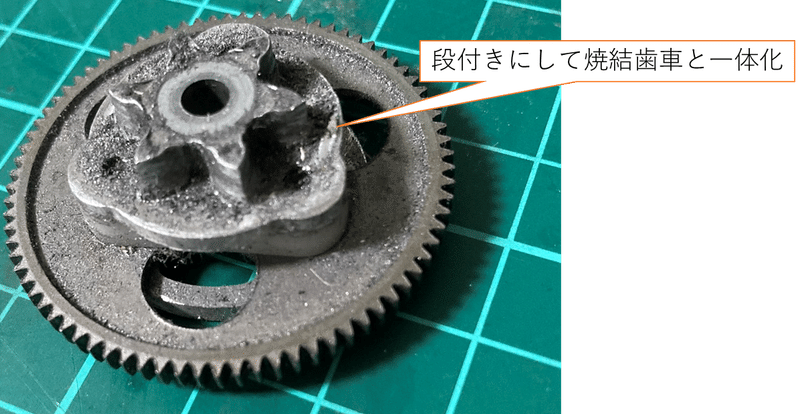
脚性能を高めたいならとにかく初段(モータピニオンとかみ合う歯車)の出来にこだわったほうがいいです。脚の効率に直結します。
私の場合自作のm0.5の歯車を精度良く作れる気がしなかったので、KHKさんの歯車を追加工して使用しています。
かわロボ関係者ならご存じの小原歯車工業株さんの焼結歯車に特にお世話になっています。KHK|小原歯車工業株式会社 (khkgears.co.jp))
最後に
こだわりは人ぞれぞれだと思いますが、個人的に気にしている脚周りの構成の話でした。
割愛したところが多々あるのでそのうち追記するかもです。
ここまで書いておいてなんですが、正解がないのがかわロボのいいところだと思います。人によってとらえ方がありますが、少しでも読んだ人の参考になればと思います。
この記事が気に入ったらサポートをしてみませんか?