
脳画像×運動失調⑧

こんにちは。研修が始まりましたが、こちらも継続します!
ということで、今日も脳画像と運動失調についてお話させて頂きます。
先日は
”逆モデルであるフィードバック誤差学習理論”
についてお話させて頂きました。
今日は
”順モデルである最適フィードバック制御理論”
について、お話させて頂きます。
このお話をする前に、、
疑問に思うことが出てきます。



ということで、僕らの運動は始まる前から予測されています。また、運動途中の外乱やアクシデントにも柔軟に対応できるようになっています。このメカニズムの説明を今からさせて頂きます。それが、この疑問を解くヒントになります。
※この時に「そのメカニズムは後日話します」と言った内容です。

さて、まずは順モデルについて思い出しましょう。
順モデルとは
”ある運動指令がどのような動作(感覚情報)を引き起こすか”
というものです。
つまり、
「この運動指令なら、こんな情報返ってくるはずなんだよな~」
って予想することですよね。
また、この分かりにくい図で申し訳ないです、、
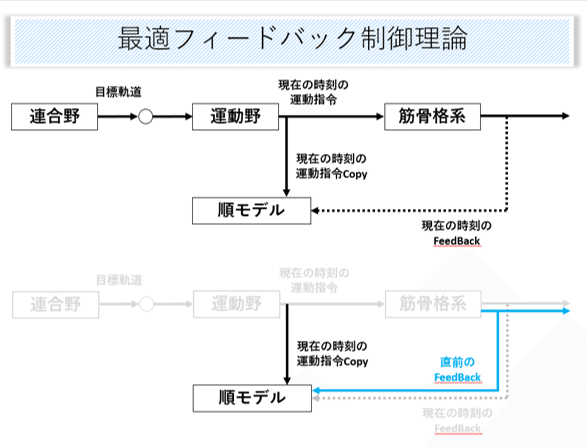
この図の上をみてください。
”現在の時刻(時刻tとする)の運動指令の感覚フィードバック信号”は、まだ脳に到達していません。
その代わりに、今まさに出力されている
”現在の時刻(t)の運動指令のコピー”と、
”直前(t-1)の感覚入力(フィードバック情報)”を
もとに、順モデルが
”次の時刻(t+1:50ミリ秒くらい先)の状態を予測”します。
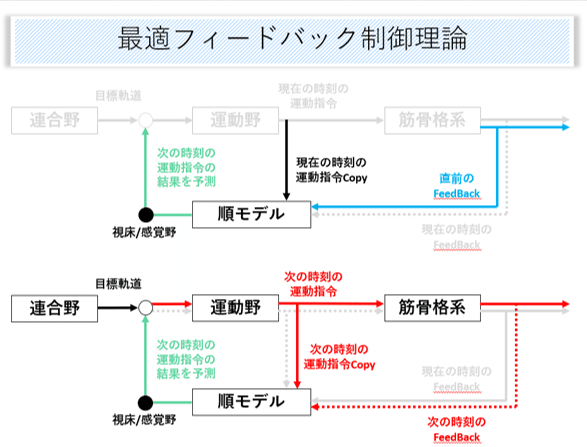
この予測を使って、
”次の時刻(t+1)の運動指令”を生成します。
予測した動きが過剰であれば、次の時刻の運動指令を少し弱め、逆ならば少し強めに変更できます。
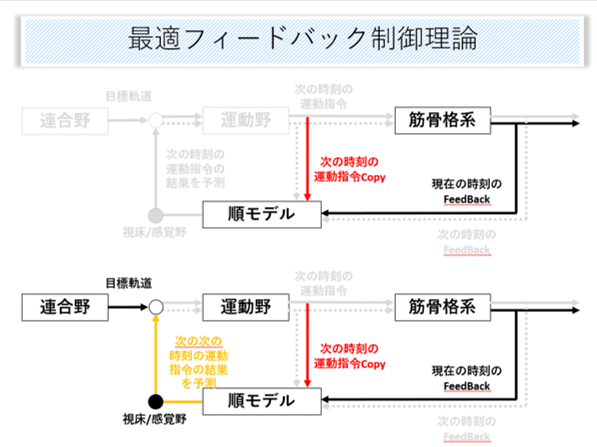
次の時刻(t+1)になれば、
”次の時刻(t+1)の運動指令のコピー”と
”現在の時刻(t)の感覚入力(フィードバック情報)”を使い
”次の次の時刻(t+2)の運動指令”を生成します。
このように最適フィードバック制御理論では、この過程を循環的に続けて連続的に運動指令を生成できます。
少し先の運動指令を生成するという意味では、フィードフォワード的ではありますが、このようにフィードバック情報に強く依存する点において、純粋なフィードフォワードではありません。
このように、運動は先回り、先回りして制御されているため、滑らかで無駄のない動きが実現されます。そこで生じた誤差はフィードバック誤差学習理論で修正・学習されていくものだと思います。
さて、これで最適フィードバック制御理論の話は終わりです。
こちらも、スライドをもう少し分かりやすくできれば更新します!
小脳って勉強すればするほど、奥が深くて、人間ってすごいです、、
次回は”小脳における姿勢制御への関与”についてお話します。
次回に続く、、、
いいなと思ったら応援しよう!
