
ジェットフォイルについて その1

1. ジェットフォイルとは?
船体の下に翼を持ち、水面を飛ぶ飛行機のような船である。浮力で浮くのではなく、水中翼から発生する揚力で船体を水面上に持ち上げて航行する。そのため水の抵抗を受けにくくウォータージェットエンジンを搭載していることもあり、時速43ノット(おおよそ時速80km)のスピードが出せる。その速度から航空機と対抗でき、日本では新潟-佐渡、羽田-大島、福岡-壱岐の航空便を撤退に追い込んだ。ボーイングが開発・製造し、現在では川崎重工が生産からメンテナンスまでを一貫して行っている。正式名称はボーイング929で初期型は-100、改良型は-115、インドネシアが発注した軍用型は-119、川崎重工が製造した型は-117の番号がついている。総生産数はボーイングが26隻、川崎重工が16隻の計42隻である。ジェットフォイルの名前はジェットエンジンを搭載し、箔(英語でfoil)のように鋭く薄い翼を持つことからつけられた。ジェットフォイルは以下の特徴を持っている。
優れた乗り心地
水中翼により船体が完全に海面上に出て翼走するので波の影響を受けにくい 。波の高さが3.5m程度でも航行できるので就航率が高い。風に対しても強く、秒速20メートルほどの横風が吹いても安定して航行できるそうだ。水中翼で発生する揚力をフラップで制御することで不快な揺れや動きを抑えており、旋回するときは飛行機やバイクと同じように船体を内側に傾けるので、横方向に力を感じることはない。浮上時や着水時も衝撃はほとんどなく、浮上・着水を体感することはほぼない。ある運航会社は離着水の衝撃が少なく航空機よりも良い乗り心地が提供できると言い、ある記者は時速90kmの電車よりも乗り心地が良いと言っている。
運動性の高さ
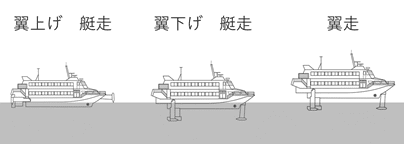
高速で航行できるが動作も俊敏である。旋回半径は最高速度45ノットのときに200m程度である。緊急時には翼走(水中翼で揚力を得て水面から飛び上がって航行すること)から艇走(水中翼で揚力を得ずに浮力で水の上に浮かんで航行すること)へと瞬時に移行し、ウォータージェットを前向きに噴射して約90mで停止する。逆に艇走から35ノット以上の安定した翼走へと移行する時間は、1~2分で距離にして1~2 kmである。もしテイクオフ中に危険が生じたときでも、エンジンの出力を下げることですぐに艇走状態に戻せる。
水中翼で船体を水面上に出して航行する
上記の特徴を持つジェットフォイルは客船としてトップクラスの運動性能と乗り心地を有する高性能な船舶となっている。そのため値段も高く、25年ぶりに建造された東海汽船「結」の価格は50億円ほどとされている。日本初のジェットフォイルである佐渡汽船「おけさ」は22億円とされ、為替レートを加味すると4~5倍の値段になっている。
日本では佐渡汽船が初めて導入し、成功を収めたのを皮切りに全国で広がった。現在では佐渡汽船、東海汽船、隠岐汽船、九州郵船、JR九州高速船、九州商船、種子屋久高速船、未来高速(韓国)、Far East Hydrofoil(香港)が合わせて29隻を使用している。日本国内では離島航路を中心に7航路・21隻が使用されている。各航路に共通する特徴として行き先の島の経済規模が大きく、往来する旅客が多いことが挙げられる。過去にはヨーロッパや北米でも使用されていたが、現在では使用されていない。現在使用されている会社・路線を以下に示す。

過去に使用されていた会社・路線を以下に示す。

2. ジェットフォイルのしくみ
船を高速化する時に障害になるのが水の抵抗である。普通の船は浮力によって浮いているので水の抵抗から逃れることは難しい。そこで水中翼で揚力を発生させ船体を宙に浮かすことで、水の抵抗を少なくしているのが水中翼船である。ジェットフォイルでは水中翼と水中翼と船体を結ぶストラットの一部だけが水中に存在し、抵抗を少なくしている。水の抵抗が減るということは速度の向上だけでなく、燃料消費を少なくすることにもつながるので効率的な運航につながる。しかし安定性という意味ではジェットフォイルは復元力が発生しないため、不安定な状態になっている。そこでコンピュータによって翼で発生する揚力を細かく調整することで、船体をまっすぐに保ち転覆を防いでいる。以下にジェットフォイルの主な仕様を示す。実際には船ごとに仕様が異なる。

2.1. 推進装置のお話
ジェットフォイルではディーゼルエンジンとプロペラではなくガスタービンエンジンとウォータージェットポンプを搭載している。ウォータージェット推進は効率こそプロペラより劣るが、高速航行に適しており艦艇や巡視船などに採用されている。回転する力を生み出すガスタービンエンジン、回転する力をコントロールする減速機、回転する力で水を噴射するウォータージェットポンプの3つで構成されている。これが船体の左右に1組づつ設置され、それぞれを独立して運転できる。

Princesse Clémentine(後のセブンアイランド虹 )に搭載されていたジェットエンジンの写真
photo by Frank Van Hevel
ジェットエンジンの仕様
エンジン出力(15.6℃-高度0m):2794 kW
パワータービン回転範囲 :6000-14500 rpm
ガスジェネレータタービン回転範囲:10000-15000 rpm
タービン入口温度:980℃
エンジン重量:1130kg
燃料消費量:0.503 lb/HP-hr

エンジン周辺の機器配置図
ガスタービンエンジンはGM・アリソン製(現在はロールスロイス・アリソン)の501-KFエンジンでスーパーグッピーやP-3C、C-130、E-2などに搭載されているT56エンジンの船舶型である。ガスタービンエンジンは空気を圧縮する圧縮機、圧縮した空気と燃料を混合し爆発・燃焼させる燃焼器、高温高圧の排ガスを回転する力に変換するタービンから構成されている。ディーゼルエンジンよりエンジンの駆動を補助する機器が少なく、省スペースかつ軽量で大きい出力を得られる利点がある。501-KFエンジンは2軸型で回転する軸が2つに分かれており、左側が圧縮機を駆動するガスジェネレータの軸で、右側が外部に出力するパワータービンの軸になっている。それぞれを異なる回転数で動かせるので運転の自由度が高く、回転数・トルクの変動が大きいときに使用される。

2軸型ガスタービンエンジンの模式図
ガスタービンエンジンが生み出した回転する力は減速機に入力され、速度を落としトルクを増やして、ウォータージェットポンプに入力される。減速比は6.37である。ウォータージェットポンプは水を吸い上げて圧縮し、後方のノズルから勢いよく噴射し推力を得ている。このポンプを大型にしたものがサターンロケットの燃料圧送ポンプになるそうだ。ジェットフォイルでは速度を出さないと揚力が発生せずテイクオフできない。よって低速、つまり水の取り込み口に水が勢いよく入ってこないときでも水を吸い込み、大きな推力を出すことが要求される。またテイクオフ後も加速のために噴射する水の圧力を高くし流量を増やす必要がある。そのためウォータージェットポンプは水の吸い込みに優れた前段と、水の圧縮に優れた後段の2つに分けられている。前段は8枚の羽根で、後段は15枚の羽根からできている。水を吸い込む圧力は-0.6~1.5 kg/cm2の間で、吐出圧力は2~10kg/cm2の間で変化する。水は後部中央ストラットの先端から吸い込まれ、ストラット内の導管を通ってウォータージェットポンプへと入っていく。ストラットを跳ね上げているときは船底の吸入口から水を吸い込んでいる。
巡航中はポンプ一台で1分あたり約90トンの水(25mプールの1/4ほど)を180 km/hで噴射し、7.5トンの推力を生み出す。これはVLCC(東京タワーほどの大きさがある大型石油タンカー)で石油の積み下ろしに使うポンプに匹敵する性能である。燃料消費量は2150リットル/時と良い数字ではないが、スピードが早いので距離当たりの燃費は悪くなく、ディーゼルエンジンの双胴船とほぼ同じとなっている。ウォータージェットポンプの出口には水を噴射する向きを変えるリバーサーとデフレクターが設置されており、艇走時に船の向きを変えたり後進したりするときに使用している。リバーサーやデフレクターが使用できるのは艇走時のみで、翼走する時は使用できない。
ガスタービンエンジンには無負荷保護装置(TUPS)がついている。荒天時に波を越えるときなど、翼深度を浅くしている(普段よりも水面から離れている)ときには水の吸入口と水面が近くなるので、ポンプが水ではなく空気を吸い込む可能性が高くなる。空気を吸い込むとエンジンの負荷が軽くなるので回転数が上昇し故障してしまう。回転数が上昇しすぎると自動的にエンジンが停止するが再起動が必要なので、遅れが発生する・乗り心地が悪くなる要因となる。そこで空気を吸い込む前兆である、ポンプ入口の圧力低下を検出しエンジンをアイドルにして回転数の上がりすぎを防ぐのがTUPSである。
2.2. 水中翼と船体のお話
水中翼は前方と後方に2つあり揚力比は約1:2となっている 。高波でも運動性を確保するためにカナード翼配置となっている。また水中翼が水面上に飛び出すことを最小限にし、波が船底に当たることを防ぐように設計されている。翼の後縁にはフラップがあり、水中翼で発生する揚力を調整して船体の姿勢を制御している。前部水中翼のフラップは6枚あり、トリム(船首の傾き)や翼深度を制御している。後部水中翼のフラップは左外側・左内側・右内側・右外側の4組に分かれており、2枚1組で計8枚のフラップがある。旋回時のバンクを取るときのローリングや後部水中翼の翼深度によるトリムを制御している。さらにバンクを取り傾いているときは横滑りを防ぎ、ストラットと合わせて向心力を発生させている。
前部ストラットは舵として左右に7度づつ動くようになっている。翼走中は旋回方向に動かして前部ストラットが抵抗にならないようにしつつ、向心力を発生させスムーズな旋回を補助する。後部ストラットは後部水中翼を支え、中央のストラットはウォータージェットポンプの水吸入口となっている。各ストラットや水中翼は上げ下げできるので水深が浅いところでも航行でき、さらにメンテナンスを容易にしている。上げ下げに要する時間は1分から2分ほどである。ジェットフォイルを飛行機に例えると前部水中翼が水平尾翼、前部ストラットが垂直尾翼、後部水中翼が主翼に相当する。さしづめ下向きのT字型カナード翼を持つ双発リアジェット機といえるのではないか。材質は水中翼・ストラットにステンレス鋼、フラップにチタン合金を使用している。水中翼の主要部品は削り出しで作られており、飛行機メーカーらしい作り方である。前部水中翼の付け根にはショックアブソーバーが入っており衝突した衝撃を和らげ船の破壊やけが人の発生を防止している。船尾水中翼の付け根にはシャーピンも搭載されている。後ろ向きに大きな力がかかった時に破壊されることで水中翼の破損を防ぐと同時に、強制的に水中翼を跳ね上げることで素早く停止できるようになっている。
フラップ・ストラットは油圧を制御するサーボ弁、油圧を動かす力に変換する油圧アクチュエータ、力をフラップ・ストラットに伝えるリンケージで駆動する。ACSのコンピュータからの信号でサーボ弁が動作し、油圧が油圧アクチュエータに伝えられる。油圧アクチュエータが油圧を機械的な力に変換しリンケージを介して、フラップ・ストラットを動作させる仕組みになっている。動作状態を位置検出器で制御コンピュータ、自動着水回路にフィードバックし、次の動作に反映している。サーボ弁は2つのコイルで動作し、1つはACSのコンピュータによって、もう1つは自動着水回路によって動作する。自動着水回路はACS(姿勢制御システム)が機能しなくなったときに油圧アクチュエータを着水するように動作させるシステムである。

船体は3層に分けられており、与圧は必要ないことから角ばった形になっている。一番下の層には燃料タンク・ガスタービン・減速機・ウォータージェット・その他の機器類が配置されている。水密隔壁によって16の区画に分けられていて2区画に浸水しても安全なようになっている。ジェットエンジンなどが収められている区画は防火構造になっており他の区画と区切られている。消火設備が取り付けられ、真上にある客室に被害が出ないように工夫されている。上の2層は客室になっており最大300名の乗員乗客を収められる。船体横と下部客室の前方には大型の角窓を配置して眺めを良くしている(下部客室の前方の窓がない船もいる) 。上部客室の前方に操舵室があり、機器や椅子の配置はさながら航空機のコクピットのようである。操舵室も防火構造となっており他区画からの延焼を防いでいる。船体の材質はアルミ合金であり、一部では肉厚を薄くして徹底的に軽量化している 。内装には軽くて強度があるハニカム材が使用されている。救命装置は膨張式の救命浮器と救命胴衣が装備されている。
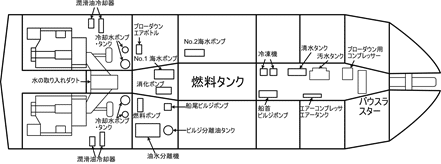
機器配置の一例
ACSや照明などの船内の電源は50kW・60Hzのディーゼル発電機2台によって賄われている。2台の発電機は互いに完全に独立しており、片方が故障しても他方に影響が出ないようになっている。ACSは直流と400Hzの交流を必要としている。直流は発電機の60Hz交流を整流した直流電源が供給され、400Hz交流負荷は直流電源をインバータで400Hzに変換して供給される。交流・直流電源の変換部が故障した場合は予備の整流器・インバータが動作するようになっており、予備の整流器も故障したら非常用バッテリーで電源が確保される。
2.3. ウォータージェットポンプの異物吸い込み問題
ウォータージェットポンプで問題になるのが異物の吸い込みである。佐渡汽船がジェットフォイルを導入した直後はこの問題に大いに悩まされた 。特に水中翼を上げている状態では水面近くの異物を吸い込みやすい。数センチの木片でも内部で引っかかると大きな振動を発してポンプが正常に動作しなくなる。異物をポンプから出すのは一苦労で、水をポンプから抜いた後にダイバーを入れて点検口から異物を回収する。しかしブレードが入り組んだポンプから異物を探し当てるのは容易ではなく、取り出しには時間を必要とするので欠航せざるを得なくなってしまう。対策としてボーイングが「信濃川にごみを捨てないでキャンペーン」を行ったらどうかと提案したこともあったという。またウォータージェットポンプのリバーサーは斜め前方に水を噴射するので海底の泥を舞い上げやすく、この泥を吸い込むこともある。佐渡汽船では泥対策としてバースを浚渫する・岸壁にキャプスタンを設置して離着岸操作を素早く行うことで、エンジンの運転時間を短くするなどの対策をした。
異物問題の解決策としてバースの上流側にごみ対策の金網を設置する、グリルの目を細かくすることが考えられた。従来のグリルの目は大きさが190×35 mmであり、異物がすり抜けていたので30×30 mmに改良した。この目でも通る木片はポンプ内で引っかからずに外に抜け出す可能性が高い。しかし単に目を細かくするだけでは抵抗が増え性能が落ちてしまうので、平面だったグリルを山形にして性能が落ちないようにした。また目を細かくするとグリルを通過する水の流速が上がるので材料が腐食しやすくなる。そこで従来ステンレス製だったのを鉄とチタンを試してチタン製とした。しかし目を細かくするとグリルに異物が引っかかりやすくなり、吸い込み口がふさがれ性能が低下してしまう。そこで水の吸い込み口から高圧空気を出して異物を取り除く、ブローダウン装置が開発された。この2つの改良により異物問題はほとんど解決された。
2.4. 水中物との衝突問題
もう一つの問題が水中物との衝突である。特に問題となっている水中物はクジラであり、海外では運航停止の直接の理由になった。2019年に佐渡汽船のぎんががクジラと衝突する事故が発生している。この事故では回避操作を行ったが間に合わずに、クジラが後部水中翼に衝突している 。後部水中翼のヒューズピン(大きな力が加えられた時に意図的に破壊され被害の拡大を防ぐ部品)が破壊され翼走できなくなり、船体にもへこみや亀裂などのダメージを負った。水中物対策にこれまでさまざまな策が考えられてきた。対策は大きく2つに分けられ、水中物の早期発見と衝突時の安全確保である 。
早期発見では以下の方法がとられている 。
・海洋生物目撃等情報などの障害物情報の活用
目撃情報や鯨ハザードマップに基づいて水中物の発生が予想されるところでは衝突防止・衝撃軽減を目的に減速して航海する。しかし安定して翼走を続けるのはある程度の速度が必要であり、減速にも限界がある。
・運航中の見張り強化
作業手順の見直しや新システムの導入により見張りに当てる時間を増やして早期発見に努める。佐渡汽船では衛星利用測位システム(GPS) を用いた自船表示システムを開発した。操縦席のモニターに航路・危険区域・進路や速力などが一つの画面に表示されるようにし、見張りに専念できるようにしている 。
・ 水中音響発生装置(UWS)の活用
UWSは船首水中翼の先端に搭載され、水中生物が嫌がる音を出して回避を促す装置である。生物の種類によって聞こえる音・嫌がる音が違うので航路に応じて音を変える必要がある。前述したぎんがにもUWSが搭載されていたが事故が発生しており、音源や音の届く範囲には改善の余地があると思われる。
アクティブソナーを用いて能動的に水中物を発見する装置もある。水中に超音波を発射して障害物からの反射波をもとに探知を行う。実用化されているものでは左右方向に30°、上下方向に7°、探知距離は最大1000 mとなっている。しかし波高が1mを上回ると海面で反射する超音波の影響が大きくなり、対象物の識別が困難になる特性がある。
衝突時の安全確保では以下の方法がとられている。
・座席の改良
シートベルトを3点式にし、シートベルト着用を徹底する。古い座席では身体へのダメージが大きくなるので座席を改良するのも重要である。
・ 船体の構造改善
船首の船底を2重化し、衝突して外側の壁に穴が開いても内側の壁で食い止め船内に水が入らないようにしている。さらに船底を16の区画に分け、船底全体に水が入らないようにしている 。一部のジェットフォイルでは一階前方の窓を塞ぐことで、衝突時にガラスが割れて負傷者が出るのを防止している。
利用者も椅子に深く腰掛けて適切にシートベルトを用いる・船員さんの言うことをちゃんと聞くなど安全確保に努めていきたい。
3. 船の制御方法
ACS(Automatic Control System)は船体の姿勢を制御するシステムで、ジェットフォイルの頭脳とも呼べる。その目的は、1.波に追従して喫水(翼深度)を一定に保つ、2.動揺を抑えて良好な乗り心地を確保する、3.保針性を保ち応答の良い操縦性能を持つことである。水中翼とACSはこれらの目的を達成できるように設計された。従来の水中翼船は水中翼が水面上に飛び出しているものが多く、船体が傾いたときは翼の左右で水没している翼面積が変化し揚力の差が生じることで、復元力を確保していた。しかしジェットフォイルでは復元力が発生せず、船体が傾いたらそのまま横転してしまう 。(F-117より不安定じゃないかな?) そのためACSが常にピッチングやローリングなど船の姿勢と動きを制御している。筆者はこのACSがジェットフォイルの肝であり、ボーイングの高い技術力があったからこそ実現できたと考えている。

搭載されているセンサー・動翼

船首の出っ張りがハイトセンサーになる
ACSは船の姿勢と動きを監視するセンサーとコクピットからの指令を受けて水中翼のフラップやストラットを制御している。センサーには超音波で海面からの高さを計測するハイトセンサー、ピッチ角・ロール角を測定する垂直ジャイロ、旋回時の角速度(針路が変化する速度)を計測するヨーレートジャイロ、上下・横方向の加速度を計測する加速度計がある 。さらに針路保持のためにジャイロコンパスから船首の向きの情報を得ている。単純な姿勢制御はハイトセンサーと垂直ジャイロだけで可能だが、加速度計とヨーレートジャイロを併せて使用することで、抜群の乗り心地を実現している。操舵室では翼深度、ロール・ピッチ角、旋回角速度・ストラット・フラップなどの各設備の動作状況が確認でき、翼深度・針路の設定や操縦輪での操作ができる。通常の翼走モード(プラットフォームモード)以外に船の状態に応じていくつかの制御モードがある。
・プラットフォームモード
水面の状態に関わらずなるべく一定の高さを保ち上下動が少なくなるように制御している。上下動が少ないので乗り心地が良く、主に波が穏やかな時に使用する。
・テイクオフモード
加速中は船首が持ち上がろうとするのでそれを抑制し、水平に近い姿勢を保ちながら最短時間でテイクオフ出来るように制御する。またテイクオフ中は速度が遅く、フラップを使用して船体を傾けて旋回を行うのが難しいので、操縦輪の操作に応じて前部ストラットを動作させることで旋回を補助している。加速の手順は次のようになる。離岸後ACSをテイクオフモードにして翼深度を設定し、ポンプの回転数を約1300 rpm(rpm:1分間当たりの回転数)にして加速を開始する。回転数を一気に上げるとポンプ内でのキャビテーションの原因となるので、速度が上がるにつれて徐々にポンプの回転数を増やしていく。ACSによって水中翼のフラップが下向きに動作し、15ノット前後で船体が持ち上がり25ノットで離水する 。35ノットで安定した翼走状態になる。水の抵抗が少なくなるのでさらに加速し40ノット前後で巡航速度となる。
・コンタワーモード

高波など水中翼が水面上に出そうなときは水面に沿うように航行することで、水中翼が水面上に飛び出すことを防止する。船体の上下動は縦加速度計とハイトセンサーで計測してACSに入力されているが、コンタワーモードでは縦加速度計の入力値を0.25倍に弱めている 。そのため上下動を感知しにくくなり、ハイトセンサーの数値すなわち水面からの高さが重視されるので、波に追従して波乗りすることになる。また船体の動きを抑制させる縦加速度計の入力値が小さくなるので、操縦輪による手動操作が早く反映され波に対処しやすくなる。波高2m程度であればコンタワーモードだけで翼走を続けられるそうだ。
・進路保持モード
操縦輪で操作を行わずに設定された針路を保持して航行するモード。ジャイロコンパスからの針路情報をフィードバックして自動操舵を行う。操縦輪がある程度以上操作されると針路保持モードがオフになり、操縦輪の操作に従って旋回する。
ACSのシステムやセンサーは2重化されており故障してもバックアップで航行を続けることが可能である。特に電源は3重のバックアップになっており2系統ある電源の両方が喪失しても、非常用バッテリーで緊急着水ができるように自動着水専用のバックアップシステムが用意されている。ウォータージェットエンジンも左右どちらかが動作していれば安全に着水・艇走できるようになっている。

緊急着水の様子
船の科学 1987年8月号 「超高速旅客船 "ジェット7"・"ジェット8"」より引用
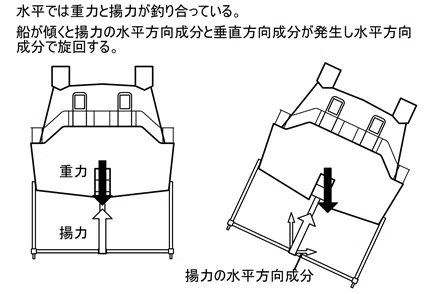
普通の船は舵を使って旋回するので、遠心力によって旋回する方向と逆方向に傾く。しかしジェットフォイルは飛行機やバイクと同じように旋回する方向に傾く。後部水中翼のフラップで船体を傾け、水中翼に垂直に発生する揚力と重力の合成で旋回する方向に横向きの力を生み出し、旋回を行う。さらにストラットを旋回方向に傾けることで釣り合い旋回と呼ばれる横方向に力を感じない美しい旋回ができる。これはフラップでロール角を細かく制御できるジェットフォイルならではの特技である。45ノットの翼走時でも旋回半径は200mと小さく、操縦輪で指示を出してから5秒以内に6度/秒の旋回ができるので非常に小回りが効く 。ちなみに速度が35ノットを下回るとフラップが揚力を増加させる方向に動くので、旋回性能が低下する。艇走中ではウォータージェットの噴出方向をデフレクターやリバーサーで変え、ストラットを旋回方向に動かして旋回する。バウスラスターと組み合わせて船を真横に動かしたり、その場での旋回を行える。
4. 荒天時の操船について
ジェットフォイルの優れた性能は翼走を前提にしており、艇走では波に揺られ速度も遅いので翼走を保ち続けることがポイントになる。翼走には35ノット以上の速度を出し続ける必要があるので、船体と波が当たることはなるべく避けたい。特に船首は水中翼を跳ね上げるために凹んでおり、ここに波が当たると速度が落ちやすい。荒天での航海は船体と波との衝突を避けるために翼深度を浅くしたい(なるべく高く飛びたい)、水中翼が水面上に飛び出ることやポンプが空気を吸うことを防ぐために翼深度を深くしたい(なるべく低く飛びたい)という相反する要求を満たす必要がある。そのために前述したコンタワーモードやガスタービンエンジンの無負荷保護装置(TUPS)のほかに操縦輪を操作して波が低いところを通る・翼深度の変更・タッキング航法を用いている。
翼深度の変更は船体と海面の距離を波浪状態に応じて変更することである。波の山を越えるときは翼深度を浅くして波が当たらないようにしており、逆に波の谷では翼深度を深くして翼走の継続に務める。船体が上下する時間や波の高さを考えて操作する必要があり、高度な方法である。タッキング航法はいわゆるジグザグ航法で船の進行方向を波に対して斜めや横にして波と出会う周期を長くすることで、操縦輪を操作する余裕を作ったりスピードの回復を行う。
これらの航法を駆使していても波とぶつかったりTUPSが作動したりすると速度が遅くなる。遅くなると揚力が小さくなり、それを補うためにピッチ角が大きくなる(船首が持ち上がる)ので船尾が下がり、着水しやすくなる。よって速度が遅くなった場合は波との衝突を避けて速度を回復させる必要がある。増速するときは船首が持ち上がりやすくなるので、テイクオフモードを併用してパワーアップすることもある 。
実際に航行可能な波の高さは波長によって変わる 。波長が80m以上のうねりであれば波高が5~6m以上でも翼走できる。1970年代半ばにボーイング社が行った試験航海では波高13mの中を航行した例がある 。波長が70~80mでは波高は4~5m、30~50mでは3.5mがそれぞれ航行できる限界である。
5.1. ボーイングの水中翼船の開発
ボーイングは1959年に水中翼の研究開発をスタートした 。初めに132ノットで航行できる試験機Aqua Jetを開発し、水中翼のテストを行った。1962年に全没型の水中翼と自動制御システムを持ったモデル520を開発し、ウォータージェットエンジンや姿勢制御システムの開発・試験を行った。試験データを元にモデル883(FRESH-1)と呼ばれる試験的な水中翼機を開発し、水中翼で発生するキャビテーションの研究を行った。モデル883は1963年に84ノット(155 km/h)を記録し世界記録を更新した。

PGH-2トゥーカムカリの写真 photo by Photograph Curator
そして実用的な水中翼船として1963年に米海軍向けにPCH-1を開発した。対潜哨戒を目的とし、プロペラ駆動で50ノットの速度で航行できた。沿岸警備隊でもテストされたが、整備の都合で採用されなかった。1967年にモデル923、PGH-2トゥーカムカリを開発した。ウォータージェットエンジンを搭載しジェットフォイルより一回り大きく、後部水中翼は2つに分かれている。ベトナム戦争や北大西洋条約機構(NATO)諸国で使用された。

ペガサス級ミサイル艇の写真
photo by Photograph Curator
その後ソ連が水中翼船の対潜艦を開発していたこともあり、NATOとして水中翼船型のミサイル艇を開発することになった。イタリアや西ドイツと共同でペガサス級ミサイル艇が開発された。ジェットフォイルより一回り大きく、ミサイルのほかに76mm速射砲や射撃管制システム用の大型アンテナが装備されている。シアトルからサンディエゴへの約2000kmの回航を34時間で行い、性能の高さを見せた。1977年7月に就航しフロリダ・キーウェストに配備され、カリブ海と西大西洋での密輸監視に使用された。性能を追求したため高価な船となり、本来の調達計画より少ない6隻の建造にとどまった。1993年に運用を終え5号機がミズーリ州にある水中翼船の博物館で保存されている 。1974年に水中翼船の技術を民間用の船舶に転用してジェットフォイルが作られた。ペガサス級は翼走と艇走でエンジンを使い分けていたがジェットフォイルでは統一されている。下表にジェットフォイルとペガサス級ミサイル艇の違いを示す。

ジェットフォイルは他のボーイング機と同じようにシアトルで開発され、現在は737MAXの製造が行われているレントン工場で製造された。進水するときは普通の船と同じように後ろ向きに滑らせて工場脇のワシントン湖に浮かべた。2000人の研究者と3億ドルの研究費を投じて開発されたという。
量産1号機は1974年の3月に進水し年内に引渡しを行う予定であったが、試験・開発の遅れにより延期された。7月にシアトルに近いピュージェットサウンド湾での試運転が開始され、翌年1月まで徹底した試験が行われた。ジェットフォイルの船級検査・試験は米国沿岸警備隊、米国船級協会、香港海事局によって行われ、波への耐候性や故障を模擬した試験などが行われた 。具体的にはフラップや水中翼を最大限に動作させることで運動性能を確認し、センサーや油圧システムの故障試験やシングルエンジンでの航行などが行われた。認証後の1975年2月に香港の噴射飛行社へ初めての引き渡しが行われた。2~5号機では量産に向けた試験プログラムが行われた。試験中に時速80kmで航行中に水中浮遊物と接触したが、船体に問題は発生せず乗客は全員無傷であった。波高7mの海でも試験が行われた。
導入初期のトラブルはいくつかあったものの、大きなトラブルはなく最初から優れた運航実績を積み重ねている。導入初期のトラブルの一つに船体前方や水中翼に小さな亀裂が発生したことがある。船体前方の亀裂は高波により大きな力を受けたため船体がゆがんだものと考えられた。改善策としてバルクヘッドを増設しゆがみにくくした。水中翼とストラットの亀裂も高波による応力の集中が原因とされ、製造時の溶接する場所の変更・補強材の増設・外板の厚みを増したことにより改善した。また減速機中のベアリングの摩耗も問題になった。潤滑油が不足することが原因とされ、潤滑油を保持しやすいように設計が変更された。
5.2. ライセンス生産の開始
1980年代後半のボーイングは747-400、737クラシックの生産を開始し、ETOPS(双発機の洋上飛行の制限)の緩和で双発機が活躍の幅が広げつつあったことから、767が受注を増やしつつあった。航空機の製造が忙しくなったボーイングは1985年にジェットフォイルの製造を中止し、入札でライセンスを移転することにした。住友重機械工業、日立造船、川崎重工業などが候補になり、川崎重工業が製造を引き継ぐことになった。航空機ベースで作られたジェットフォイルは扱いが難しくフィート・ポンド単位で作られた図面に苦労したという。佐渡汽船から技術提供を受けながらジェットエンジン以外は全て自社で生産できる体制を構築した 。ウォータージェットポンプは1987年にロックウェル・ロケットダインから事業譲渡され「川崎パワージェット20」の名称で生産している。1989年3月に川重1番船の佐渡汽船向けの929-117「ぎんが」を建造したのを皮切りに1995年までに15隻建造し、うち2隻は国外で使用された。2020年に25年ぶりに東海汽船向けに「結」が建造された。ゆいちゃんかわいい、すっごくかわいい。
川崎とは別に中国船舶工業集団で生産されたジェットフォイルPS-30も存在する。面白い形をしているので、ぜひ写真を見てほしい。中国船舶工業集団では以前から噴射飛行向けに水中翼の製造を行っており、その技術を生かしてPS-30が作られた 。ジェットフォイルとの違いは後部水中翼の中央ストラットがなく、左右のストラットで後部水中翼を支えていることである。エンジンは501-KFエンジンを、ポンプは川崎がライセンス生産したパワージェット20を使用している。取水口は左右のストラットの下部に一つづつ設けられている。ポンプ内の異物を除去するブローダウン装置は搭載されていないが、異物を取り除きやすいように点検ハッチが設けられている。水中翼は自動で跳ね上げられないようになっており、より流体力学的に適切なデザインになっている。整備時など陸上に上げるときは後部水中翼に限り手動で跳ね上げられる。救命ボードが屋根上に配置されたので上部船体の幅が増やされており定員が12%増えている。操縦席が3階に設置されており離水性能も向上している 。搭載されている姿勢制御システムはTurbojet社の関連会社が開発している。既存のジェットフォイルとの変更点として一部がデジタル制御となり加速度計が光ファイバージャイロになっている。2隻建造されTurbojetに納入された。そのうち1隻は韓国の未来高速に移り福岡-釜山間で使用されている。
PS-30の仕様
長さ:29.1m
最大幅:9.2m
喫水:4.5m
定員:294人
最大速度:43ノット
5.3. オフショア船への転用
ボーイング社はジェットフォイルには大きく分けて4つの市場があると考えていた。1つ目はカーフェリーの補完である。低速だが車をのせられるカーフェリーと組み合わせることで新たな需要を開拓できると考えた。2つ目は交通手段がない観光地への輸送手段である。従来の船より高速で乗り心地の良いジェットフォイルであれば新しい観光需要を開拓できると考えていた。3つ目は高速性を生かした地上交通の代替手段である。東海汽船さんの竹芝-館山間が該当するだろう。4つ目はオフショア支援船や軍用船として改造することであった。
洋上プラットフォームへの従来の移動手段は通常の船か、ヘリコプターを使用することが多かった。しかし船舶は時間がかかり、高波のときは乗り心地が悪くなってしまう。ヘリコプターは迅速で悪天候にも強いが、運航費用が高額になり積載量の制約が大きい問題がある。そこでジェットフォイルを改修して高速で移動でき高波にも耐えられ、それなりの積載量を持つオフショア支援船として転用しようとした。1975年頃から複数の海洋開発を行っている会社と協力して検討を進めていた。

オフショア支援ジェットフォイルの想像図
929-115をベースとして以下の変更を加える予定であった。
1. 一番上の階層は壁と屋根をなくし、貨物をのせられるようにする
2. 右舷船尾に第二の操縦席を設けて接岸時の操船を行いやすくする
3. 操縦輪を廃止してジョイスティックによって操船を行う
4. バウスラスターを強化し高波でも操船しやすくする
5. デフレクターを変更しより精密な操船を行えるようにする
6. 燃料タンクの容量を32.6m3に拡大する。この変更はイギリスやインドネシアのジェットフォイルでも採用されている
7. バウスラスターやウィンチの駆動用に油圧設備を強化する
8. レーダーやロラン設備の強化
9. 床面を重量物搭載のために強化する
10. 船尾に係留金具を追加する
これらの改修の結果、167名の作業員と手荷物・12トンの貨物を搭載し、40ノットで300海里航行できようになった 。就航率は北海で80%、メキシコ湾で95%とされ、ヘリコプターと組み合わせることで97%の就航率を確保できるとされた。またBoeing Relative Motion System+という移動システムも同時に開発された。石油プラットフォームは高波を避けるために海面より高く設置されていることが多い。このシステムはクレーンを用いてプラットフォームとジェットフォイルとの間を効率よく行き来できるようになっている。しかしオフショア船として採用されることはなく、この計画は立ち消えになった。
5.4. -100と-115の違い
-115は軽量化のため船体・客室その他が改良され総トン数が15.21トン減り、水中翼に大幅な改良が施され性能が向上した。また機械類の信頼性が向上しメンテナンスも容易になった。見た目の違いでは操縦室上のひさしが撤去されている。
・ウォータージェットポンプのシャフトの材料変更
-100で使用されているステンレスシャフトではインデューサーとの繋ぎ目に孔食が発生していた。原因はインデューサーがチタン製だったため、異種金属間に流れるガルバニー電流によるものと考えられた。そこで-115からはシャフトをチタン合金製に変更して解決した。また-100ではインデューサーは鋳造で作られて個体差があったが、-115からは機械加工で作られるようになり推力が3%ほど改善したという。
・水中翼の変更
船首の形状を長方形から三角形に変更し厚さを7.5%から12~13.5%に拡大した 。キャビテーションマージンを改善し性能が向上した 。その結果、通常の運航では前部水中翼でキャビテーションは発生しなくなった。
おそらくこれ以外にも改善点があるだろうと推測される。
6. 船舶共有建造制度
国内の旅客船または貨物船の建造について、鉄道・運輸機構と船会社が費用を分担して船舶を共同で建造することによって、中小事業者が多数を占める内航海運事業者の技術力、担保力の不足を補って製作意義の高い船舶の建造を支援する制度である 。詳しくはこちら。
ジェットフォイルの代替建造を支援するために特別な特例措置を講じている。通常では軽金属船の共有期間は9年だが、2015年度からは15年に延長し月当たりの支払額を下げている。さらに2020年度からは自治体の負担軽減を目的に自治体の負担比率を45%以上から20%へ下げ、鉄道・運輸機構の負担比率を45から70%に引き上げている。

つづきはこちら
この記事が気に入ったらサポートをしてみませんか?