
ナビゲーション距離を長くする

はじめに
こちらはオリエンティア Advent Calendar 2023 の12/17の記事になります!
自己紹介
こんにちは。伊藤元春です。

出身大学:東京大学2018年度入学
所属:京葉OLクラブ
実績:WOC2023代表, WUCO2022代表, ICL2021ME 3位, ICM2021ME 5位, 全日本ロング2022M21E 7位
オリエンテーリングの好きなところ:ナビゲーション、技術論
日本ではそれなりに速い方のオリエンティアとしてやらせてもらっています。
技術論が好きで、これまでもいろいろと論理をこねくりまわして、その通りに練習してみて成長してきました。僕のオリエンテーリングの強みは、この技術論のようにオリエンテーリングのプロセスを言語化する能力が高いことだと思います。
と、硬いことを書きましたが、新しいテレインや、足尾みたいなきれいな森を走るのが好きなよくいるオリエンティアです。オリエンテーリング大好き!!!
イントロダクション
この技術論は2022年の12月にOLK内に公開したものを、さらにブラッシュアップさせたものです。力作でして、かなり前からオリエンティア advent calendar に投稿することを決めていました。そして、2023年12月は修論執筆で忙しいと思われるので、7月からコツコツ書いています(笑)。と7月に書いたのですが、結局直前に書いてます(笑)。ではでは、本編に入りましょう。
大学を卒業して東大オフィシャルを始めるとき、正直不安に感じていたことがあります。それは、「巡航115から巡航105に引き上げる方法」を指導できるか自信がなかったのです。ですが、オフィシャル業を通してかなり思考が整理され、「巡航115から巡航105に引き上げる方法」に一つの答えが出たので、発表させてもらいます。
具体的な課題としては、丁寧に特徴物を拾えばミスしないで巡航115くらいでまわってこれるけど、もっとスピードを出さなといけない、でもうまくいかない、というものです。これが課題の人は多いのではないでしょうか。実際、僕も大学2年生のときにこの課題に直面しました。遠くを見る、シンプリファイ、などと表現されてきた考え方がその解決法にあたると思いますが、それは非常に曖昧で、感覚的で、習得が難しいと感じてきました。それを高い解像度で説明し直し、習得する手助けをすることを最大の目的とした技術論です。
セレ通過レベル以上の人に向けたとは言え、ナビゲーション距離という観点から初級者中級者はどういった状態の人であるかを説明した部分も含んでいるので、技術論が好きな人は読んでみてください。
※「二ツ塚峠」「赤城」「不動の滝(南)」「ブランシュたかやま」「勢子辻(松)」「姫木平」「青山高原」「uaul Runcs」のO-mapの一部を使用しています。版権的に問題があったら言ってください!
理論編
1. 「ナビゲーション距離」という概念
みなさんナビゲーションという言葉をよく使うと思いますが、ナビゲーションとは何でしょうか??
少し考えてみてください。
僕は、本技術論におけるナビゲーションを以下のように定義します。本技術論では、
「ナビゲーションが完了している」
=「次に自分が移動する座標が 現地で 定まっている」
とします。地図上での座標ではないですよ。現地で、3次元空間内のどの点へ移動するかがあなた視点で定まっていることです。「道を一歩先へ移動することが定まっている」はナビゲーションが完了していることの最も簡単な一例でしょう。「目の前のピークの横に行くことが定まっている」「コンパスの指す方向へ一歩進むことが決まっている」もナビゲーションが完了している状態です。
では、「ナビゲーション距離」とはなんでしょうか。それは、ナビゲーションが完了している距離、すなわち、現在地と「次に自分が移動すると定まっている座標」との間の距離です。具体的に、短いものから長いものまで紹介します。
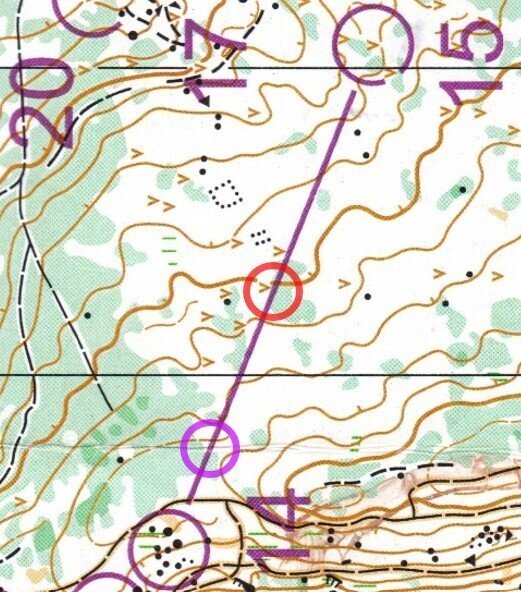
・「道を一歩先へ移動することが定まっていること」

現在地を紫の円で、移動先の座標を赤の円で表すことにします。
道に沿って、目の前の一歩を踏み出すことが決まっている状態ですね。これは初心者でもできるでしょう。
・「見えている道の曲がりまで移動することが決まっていること」

視界内で最大の距離で移動先の座標を定めていますね。
・「コンパスの指す方向へ一歩進むことが決まっていること」

レッグ線に沿って直進しようとしている例です。コンパスを振りはしたものの顔を上げて遠くを捉えていないときはこうなってしまいます。
・「コンパスの指した先に見えるあそこまで進むことが決まっていること」

顔を上げて視界内に移動先の座標を定めているとこのくらいでしょう。
・「見えている鞍部に行くことが定まっていること」

こちらも顔を上げて視界内に移動先の座標を定めている例です。
・「コンパスの指す先の、見えてはいないけどあのあたりに行く、ということが決まっていること」
さて、この例でこれまでと大きく変わったところがあります。視界外に座標を定めています。見えてはいないですが、あのあたりの座標へ移動しようということは決めています。
・「コンパスを振り、見えている尾根の奥にあるであろう沢に行くことが決まっていること」

こちらも視界外の例です。見えていなくとも、空間内のあのあたりに沢があるはずだからそこへ移動しようということは決めています。
じゃあ上記のようなことができていない人、ミスしちゃう人はナビゲーションをしていないのかと言うとそうではないですね。誰しも、次に移動する座標は定めています。ツボったときもそうです。ナビゲーションをしていないのだとしたら、どうやってそこまで移動すると決断できたのか、説明することができませんよね。上で説明したのはズレが小さい例です。そうではないナビゲーションの例としては、例えば、以下の通りです。
・「なんとなくの方向であそこへ行くということが決まっている」

現在地を紫の円で、地図上で本人が移動したいと思っている位置を赤の円、現地で本人が定めた移動先の座標を地図上に示したものを青い円で表すことにします。
地図上では小凹地に行こうと思っていますが、コンパスも振らず、地図の読み込みも浅いと、方向も距離もズレたところに移動先の座標を定めてしまうでしょう。しかし、これでも移動先の座標は定めています。ナビゲーションはしているのです。
・「逆正置したけどあそこへ行くことが決まっている」

これもナビゲーションです。移動先の座標を現地で定めています。
以上の2つの例も、次に移動する座標は定めていて、数秒後にはその座標に立っていることでしょう。ナビゲーションと言えます。ですが、これらは「非常にズレが大きいナビゲーション」あるいは「誤ったナビゲーション」などと言えるでしょう。ナビゲーションをしていない例を無理やり出すとすれば、誰かにお姫様抱っこをされて森のどこかに置かれた、みたいなことでしょうかね。パックはこれに近いでしょうか。
現地で移動する先の座標を定めていること、理解していただけましたでしょうか。
2. 長くなるとたくさんのメリットがある
ナビゲーションが完了しているということは、次に向かう座標が現地で定まっているということなので、その状態であればその座標へ移動する以外にやる必要のあることはありません。足を動かしてそこへ自分の体を持っていくだけです。とすると、移動が完了するまでの暇な時間ができますね。ただ、「一歩先まで決まっている」というレベルのナビゲーションだけだとその暇な時間は一瞬で終わります。すぐに次のナビゲーションを完了させないといけません。ところが、ナビゲーション距離が長いと、そこへ体が移動するまでの暇な時間が長いです。いろいろなことができます。その時間でやると良いことは以下のものです。
・走りに集中してスピードを出す
次の座標へ移動する時間を削ることがオリエンテーリングのレースのタイムを短くすることに直結しますね。ぜひやることをお勧めします。
・ミクロなルートチョイスをする
次に移動する座標が決まっているという性質上、その座標へ到達するまでの経路はなんでも構いません。あなたは空間内の移動先の座標はわかっているので、どこを通ろうとも目的の座標に到達することができます。最も時間のかからなそうなルートを現地判断で選びましょう。
逆に、ナビゲーション距離が短い場合、例えばコンパスの指す方向へ数m進む、というこナビゲーションしか完了していない場合、その座標へ移動するしかありません。そうしないと、自分の予定ルートを外れてしまい、どちらにずれたかという情報などを追加で入手してその次に移動する座標を定めなければならず、余計な手間がかかったり現在地の不安で遅くなったりします。そうならないために多くの人はその数m先の座標へ移動することでしょう。そうすると仕方なく藪に入ったり、汚い場所を通ることになるかもしれません。
まとめると、ナビゲーション距離が長いととにかく速いです。
3. 技術を行使して長いナビゲーション距離を取っている
みなさん知りたいところだと思います。トップレベルの選手はどうやって長いナビゲーション距離を取っているのでしょうか。それは、決してただ意識をするとかではありません。意識しただけで移動先の座標を定められるわけがないですよね。そのために必要な技術を行使しているのです。
・「遠くに見える植生界に行くことが決まっていること」

使用技術:正置、目で捉える、現地と地図の特徴物の対応
長めのナビゲーション距離を取る最も簡単な方法の一つです。見えているところへ行くだけです。そして、このナビゲーション方法の大きな特徴はズレがほぼゼロであることです。
・「コンパスの指す先の、見えてはいないけどあのあたりに行く、ということが決まっていること」

使用技術:コンパス(正置)、視線を送る、空間把握
こういった方法こそが、長い距離のナビゲーションです。見えている必要はありません。見えている遠くの地点を目指すことと、ナビゲーション距離を遠くに取ることは全くの別物です。見えていなくても、見えていない範囲に移動先の座標を定めることはできるのです。
・「コンパスを振り、見えている尾根の奥にあるであろう沢に行くことが決まっていること」

使用技術:コンパス(正置)、目で捉える、空間把握、地図→現地のイメージ
こちらも同様です。見えている必要はありません。ですが、その特徴物が空間内のどこにあるかを技術を行使して特定し、その座標へ移動することを決めることはできます。
ここの理解が難しいかもしれません。遠くを見ることと、ナビゲーション距離を遠くに取ることは別物です。遠くを見るという行為は、ナビゲーション距離を遠くに取る(=遠くに移動先の座標を定める)ための手段でしかないです。もちろん重要な手段ですが、本質は移動先の座標を定めることにあります。遠くを見たものの、座標は手前の方にしか定められていない人はいると思います。
上に挙げたのはあくまで一例です。この「ナビゲーション距離の取り方」はいろいろあると思います。上級者がオリエンテーリングをどのように行っているのか聞いてください。「このレッグ、どう行きましたか」と聞いて、どのようにナビゲーション距離を長く取っているのかを学び取ってください。
どうでしょう。だんだん理解できてきましたか。これこそが速さの秘訣です。ここで一度、イントロで挙げたシンプリファイという怪しい表現を説明し直してみましょう。
シンプリファイというのは、このようなナビゲーション距離が長い状態であるから(=遠くに移動先の座標が定まっているから)手前でナビゲーションをする(=手前で移動先の座標を定める)必要がないということを意味します。ただ単に手前のものを見ないみたいな、表面的な意味で「シンプリファイ」とか、「ラフ」みたいな言葉を使うのは気をつけた方が良いでしょう。遠くの地点に移動先の座標が定まっているという本質をわかった上でこれらの言葉を使うのなら良いと思います。
4. ズレとミスの定義
ここまで、特にミスすることをあまり想定せずに説明してきましたが、いざやってみるとうまくいかないことが多いと思います。うまくいかない、すなわちミスをどう捉えるかを一度考えてみましょう。
移動先の座標を定め、座標へ移動してみた結果、自分が(地図上で)想定している地点とズレが生じます。これのズレの程度が高いものが「ミス」です。何をもって高いとするかですね。
これを考えるために、以下の構造を理解してもらいたいです。オリエンテーリングにおいては、ナビゲーションを1回、あるいは複数回行い、最後に、ズレがほぼゼロになる「特徴物で対応を取り、そこへ移動先を定める」というナビゲーションを行います。この構造であることがほとんどです。最終的にはコントロール位置で、ズレがゼロになることを考えると納得できるでしょう。
・ナビゲーション1回+特徴物の例
例えば、オープンから道を離れて、この沢をチェックポイントとして拾おうとしたときを考えます。

(現在地を紫の円で、地図上で本人が移動したいと思っている位置を赤の円、現地で本人が定めた移動先の座標を地図上に示したものを青い円で示しています。)
初めは左の図のように、ちょっとズレのある座標を設定してしまいました。そして、右図のように沢が見えてきたときに「特徴物を用いたナビゲーション」を行って瞬時に移動先の座標を置き直します。そして到着するわけです。これが1回+特徴物の例です。
・ナビゲーション数回+特徴物の例
では、この尾根線上から沢へアタックするときはどうでしょうか。

明確に対応が取れる特徴物がなかなか現れないので、直進の途中でコンパスを振って移動先の座標を置き直すしかないです。(青の座標に着く前にコンパスを振り直しているので、青紫の位置は青と一致していないです。)技術を行使するタイミングでの現在地のズレ(今いると思っている場所を紫の円、実際の位置を青紫の円で表現)もあるのでどんどんずれていきます。しかし、最後に地形を見て瞬時に目的の沢が目に入って「特徴物を用いたナビゲーション」というズレがほぼゼロのナビゲーションをして、オリエンテーリングが成立する、というわけです。
最後の、特徴物で対応を取るナビゲーションができないレベルでズレの程度が高いときが、ミスです。この範囲に尾根が出てくると思ったら出てこない、尾根はあるがどの尾根なのか判断に時間がかかるほどにずれてしまった、などがその例です。ちなみに、前後左右、どの方向にもズレます。
以上を踏まえると、ミスの定義は、
特徴物で対応を取るナビゲーションをする際に、
A(今いると思っている地点と実際の現在地のズレ)
> B (ナビゲーションが瞬時に成立するにあたって許容されるズレ)
が成立すること。
となります。
僕の私見ですが、「ナビゲーション1回+特徴物」や「ナビゲーション数回+特徴物」のひとかたまりが、平岡のプランニング論における1ブロックにあたると思います。1ブロックをナビゲーション1回だと勘違いしている人がいるかもしれませんが、それは誤解です。この誤解、1年前に東大OLKでこの技術論を出したときに頻出だったので、要注意です!
5. ミスが起こるパターン
ミスの定義ができたところで、それが起こるメカニズムを整理しましょう。
特徴物で対応を取るナビゲーションをする際に、A (今いると思っている地点と実際の現在地のズレ) が大きい場合
①ズレが大きすぎる技術を選択してしまっている(ズレの小さい技術を使うことをさぼった)
例えば、コンパスという技術ならズレが小さく済むところ、別の技術である体感の方向感覚を用いたためズレが大きくなるといったものです。
②自身の技術レベルの低さが原因で、ナビゲーション距離もそんなに長くないのにズレが大きい
例えば、コンパスを使用していますが、それが下手で(例えば地図とコンパスが水平でないと言った理由で)ズレが大きくなるというものです。
③自身の技術レベルの低さが原因でナビゲーション距離が長くとれておらず、回数が多すぎてズレが大きすぎる
こちらの例では、単一のズレは大きくないですが、ナビゲーション距離が短すぎるため、何度もその技術を使用する必要があります。その結果、特徴物で対応を取るナビゲーションをする際には大きなズレになってしまっています。コンパスを振るときにすぐ近くを見てしまっているとこうなります。
④長く取ってみたものの最初に定めた座標がズレている(②の、レベルが高い版)
遠くに座標を定めてはみたものの、そのズレが大きすぎるという例です。例えばですが、正置の精度や、見えている特徴物との位置関係の把握が求められるのではないでしょうか。
⑤最初に定めた座標はほぼ正しいが、向かう途中で座標がズレてしまう
遠くに座標を定められていたのですが、遠くに座標を定めるとそこに到着するまでに時間がかかります。その間に座標がずれてしまうこともあります。説明のために少し短い例を出しますと、遠くに岩が見えてそれがどの岩かわかってズレがゼロであるナビゲーション完了したとします。しかし、走っているときにその座標への意識を切らして岩を見失ってしまう、というのがわかりやすい例でしょう。もっと短い例を出しますと、コンパスであそこに行くと決めたのに、目を瞑ってしばらく歩いたらわからなくなるというのも同じ現象です。転んでしまって移動先の座標がよくわからなくなる、というのも同じ現象ですね。ただ、⑤が生じる頻度は少ないと思います。⑤ではなく④や③なのではないかと疑ってください。
特徴物で対応を取るナビゲーションをする際に、B (ナビゲーションが瞬時に成立するにあたって許容されるズレ) が小さい場合
①特徴物について認識している情報の質が低い
尾根に到着したものの、どの尾根か判断できない、というのがBが小さい状態です。極論、AのズレがほぼゼロでもBがそれよりもさらに小さかったらミスになります。目的の尾根にちゃんと到着したのに、本当にその尾根なのか不安がある、対応に時間がかかるという状態です。Bが極端に低いのが初級者で、初級者が森に入れば入るほどオリエンテーリングが上手くなるというのはこのBがどんどん上がるからでしょう。
②現地で視界に入れている範囲が狭い
特徴物のすぐ近くを通過したのに、視線を送っている範囲が狭すぎて見落としてしまうというのがこの例です。真正面に出てくることだけを考えてし待っている状態です。また、これは視線を送り始めるタイミングが遅いことによっても起こります。早く視線を送れば、目的地から引いた状態で見ることができ、狭い範囲に視線を送れば済みます。近づくほど広く見ないといけなくなってしまうのです。
ここまで、ミス定義に従ってミスが起こる要因を整理しました。しかし、敢えて競技者側の要因だけを挙げました。外部の要因ももちろんあります。それは次のセクションで説明します。
6. 外部要因によってナビゲーション距離の変化が強いられる
ミスが起こることの外部要因を説明するのですが、外部要因が存在すること自体よりも、伝えたいことがあります。それは、ミスしないレベルのナビゲーション距離の上限が外部要因によって制限される、ということです。具体的に説明しますと、藪が濃いときにA藪と同じ頻度でコンパスを見るだけではミスしますよね。
特徴物で対応を取るナビゲーションをする際に、
A(今いると思っている地点と実際の現在地のズレ)
> B(ナビゲーションが瞬時に成立するにあたって許容されるズレ)
の不等式が成立してしまうわけです。
ではミスをしないために、コンパスを見る頻度を上げたりしますよね。すなわち、同じ距離の中でのナビゲーションの回数を増やしている、さらに言い換えると、1回のナビゲーション距離が短くなっていますね。ほら、ナビゲーション距離が制限されました。
このように、場面によってミスのしやすさ(不等式の成立しやすさ)が変わります。再びA,Bに分けて、外部要因によってミスが起こる(≒ナビゲーション距離が制限される)メカニズムを整理しましょう。
A (今いると思っている地点と実際の現在地のズレ) が大きくなりやすい
①視界が悪いとき
視界が悪いと、目で捉えるという技術が行使できる範囲が狭まります。そうなるとどうでしょう。視界が良いときと同じくらいの遠い距離に移動先の座標を定めようとしても、視界外をイメージする空間把握といった技術が求められるわけですが、視界が良い場合に目で捉えるよりはズレが大きいです。
②走行可能度度が悪く、体の向きの変更が強いられるとき
視界が悪いときにと同時に起こることが多いですが。これは外部要因によって競技者側の要因のA⑤が起こされやすいという状態です。富士天神山、筏場、勢子辻北などは気づいたら体の向きが変わってしまう礫地のせいでナビゲーション距離を遠くに置きづらいです。武曽横山、伊豆大島の灌木林などは視界とともに体の向きの変更が強いられる場所ですね。
B (ナビゲーションが瞬時に成立するにあたって許容されるズレ) が小さい
①似たものが複数あるとき
似たものが複数あると、少しのズレであっても、競技者のレベルが高かったとしてもミスをしてしまうでしょう。岩がたくさんあるときなどはこの状況ですし、尾根辿りもこれに当てはまるでしょう。尾根辿りは視界の狭さもありますね。
②視認する必要がある特徴物が見える範囲が狭いとき
これもBが小さい場合に当てはまります。少しのズレであっても目的の物を視認できなくなります。これはさらに2つの場合に分けられると思います。
②-1サイズが小さい
これは、穴などにアタックする必要があるときですね。岩やコブも小さい方ですね。まあ穴よりは上方向に飛び出ている特徴物なので見やすいですが。
②-2近づく方向が理由で見える範囲が狭い
これは、小さめの崖なんかがそうです。崖に高い方から向かっていくと崖の面が見えないのでなかなか見えず。少しのズレで捉えられなくなってしまいます。道の終わりに道が続いていない方から乗りに行くとき、アタックするときもこれにあたると思います。
まあ、ここまでで察しの良い人は分かると思いますが、アタックの多くはこれです。だいたいアタックポイントになるところからは見えないようにしてあり、3次元空間内の座標イメージがとても大事です。
7. まとめ ~「長い」とは?~
セクション6で、外部要因によってナビゲーション距離が制約を受けるということを説明してきました。タイトルにもあります、「ナビゲーション距離を長くする」の「長く」の意味は、この「ナビゲーション距離の制約の中の最大」を意味するのです。やっとタイトルの意味を説明できました。ですので、何mの距離に移動先を定められているのかという意味で長いではないです。でっかい地形がある場合はナビゲーション距離の制約があまりないので、100m先でもナビゲーション完了させないとダメです。しかし、植生がとても悪くて見通しが利かない場合は15m先にコントロールがあると確信してそこへ移動先を定められていれば十分偉いです。
この長いナビゲーション距離を使い、セクション5で説明したように、ミスが生じないように競技者側が適切に技術を行使して移動先を定めることで、速いオリエンテーリングが成立します。
さて、本技術論の山場は越えました。ここまでで、長いナビゲーション距離というものを理解できたと思います。ここが「巡航115から巡航105に引き上げる」ための最大の壁だったと思っています。ナビゲーション距離を長く取ることができるようになったら、あとはそれをスムーズにこなせるようになることで、その成果が成績に表れることでしょう。理論編(発展)では、そのスムーズさについてと、まだ紹介しきれていない点について説明していきます。
理論編(発展)
8. 移動に伴うナビゲーション距離の変動
長いナビゲーション距離を取ると速い、と説明しましたが、それだけでは最上位層と同じオリエンテーリングレベルには立てません。なぜなら、ただ走るだけだとそのナビゲーション距離は常に短くなっていくからです。移動先の座標に全力で近づいていくわけですが、移動する以外のことを何も行わなければ最終的にはそこへ到着し、ナビゲーション距離がゼロになります。
ゼロになるとどうなるでしょうか?
そう、止まるしかないです。まあ、あなたは長いナビゲーション距離の取り方を知っているので、その地点から再びナビゲーション距離を長く取り直せば良いのですが、止まるとタイムロスになるので良くないですね。では、ゼロになる前に走りながらナビゲーション距離を長く取り直せば良いです。もちろん、技術を行使して。以下にいくつか例を出しておきます。
・直進中に走りながらコンパスを振り直し、あそこへ移動するということを決める
こちらは長めの距離のコンパス直進のときにやることです。
・直進中にコンパスは振らないが、体感の方向で同じ方向の先にあるあそこへ移動することを決め直す
こちらも実はナビゲーション距離を取り直す一つの例です。しかし、コンパスを振る例よりもズレが大きいです。ズレの許容量が大きいときには行います。これを藪の中で雑にやってしまったり、体感の方向感覚が優れていないにも関わらずやってしまうのが、初級者中級者のミスを引き起こしている例だと思います。それでもナビゲーションではあります。ズレの大きなナビゲーションですね。
・先読みをして次の特徴物の座標をイメージし、止まる前に次の移動先を決め直す
こちらは僕がよくやっていることです。
・先読みは頑張らず、あとでリロケするつもりでとりあえずコンパスで次の移動先を定める
これも、ナビゲーション距離を長く取り直す方法の一つです。ただ、次にズレをゼロにする特徴物を用いたナビゲーションをいつ行うのかの見通しは、100%立てられていません。でも先読みを頑張らなくてもいい、などメリットもあります。
おや、だんだんスタイルっぽい話になってきましたね。そうです。ナビゲーション距離がゼロにならないようにしてレース全体で速いオリエンテーリングができる、あるいはゼロになっても速いオリエンテーリングができるシステムを一つ構築し、必要な様々な技術を行使することで実現されるものがオリエンテーリングスタイルなのです。速いオリエンテーリングスタイルまで確率できたらもう巡航100です。
9. スタイル
ここでは、2つのオリエンテーリングスタイルを紹介し、そのスタイルがナビゲーション距離をどのように長く取り、ナビゲーション距離がゼロにならないように、かつミスが起こらないように工夫しているのかを説明します。
9:1で地図→現地を重視する、地図先行
僕がよくやっているスタイルです。このスタイルの一番の特徴は、なんでも先に決めておいて準備しておくことです。
先に目指す特徴物(ズレがゼロになる地点)を決めておき、その特徴物にたどり着くための技術を選択し、その技術を行使して自分の最初の移動先を定めます。そして、その移動先に到着するまでの暇な時間に先読みをして次に行使する技術の決定と行使する準備をします。
1つレッグを例にとって説明してみます。

番号で分けられているのは、1回または複数回のナビゲーションで構成されるブロックだと思ってください。
①まず、前のレッグで先読みをしてルートの決定をしておきます。そして、最初のブロックで使う技術の準備をします。第4コントロールをパンチしたら、コンパス直進という技術を使って脱出するのでハンドリングを済ませておきます。
②パンチしてすぐに、コンパス直進という技術を使って移動先を定めます。ここは道に乗れればいいのでズレの許容が大きいです。コンパス直進の移動先に到着してナビゲーション距離がゼロになる前に移動先を置き直しますが、体感の方向で雑に置き直して大丈夫です。道が見えたらまたそこへ移動先を設定します。
③道上の見えている場所へ移動先を定めて進みます(要するに辿るということ)。このうちに、次の区間で使う技術の準備です。次は壁を辿って、小径に入りたいです。小径の終わりの点と尾根の位置関係を使うので読み込んでおきます。
④分岐に到着したらすぐに正置して壁を視認して沢の中へ移動先を定めて、壁沿いに移動先を定め直して進みます。尾根が見えたら、ここは長いナビゲーションの使いどころです。小径の終わりの点と尾根の位置関係を使って、道の終わりがあると思われる地点へ移動先を定めます。それなりに視界を確保して競技者要因のズレの許容も大きくしておけば無事に道の終わりから道に入れます。次はとりあえず辿るだけなので準備はしないです。
⑤辿ります。次は鞍部から次の鞍部の少し左へ移動先を定めることになります。鞍部や植生界と、通りたい地点の位置関係は読んでおきます。ハンドリングを済ませること次に視線を送る場所を想像しておきます。
⑥鞍部に到着したらすぐさま、正置、ルックアップ、鞍部と植生界と通りたい地点の位置関係、という技術を用いて鞍部のやや左へ移動先を定めます。まあまあ長めにナビゲーション距離を取れたので暇です。頑張って走り、登りで次の準備です、次の鞍部とその手前の壁にある尾根などを読んでおき、ハンドリングを済ませておきます。
⑦登り切ったら、正置、ルックアップを用いて鞍部へ移動先を定めます。暇なので次のレッグを読んだりします。
⑧最後にアタックです。壁を登りながら周りの地形を使ってズレをゼロにしておきたいです。壁の中の小さめの尾根で登り切りそうです。そこからコントロールがある沢のイメージを作り、登り切ると同時にコンパスで沢があると思われる位置へ移動先を定めます。余裕があれば、次の脱出の移動先が右後ろの方であることを考えながらアタックします。
こんな感じです。重要な点は、以下の通りです。
・ナビゲーション距離がゼロになる前に技術行使
・あるいはゼロになった瞬間に瞬時に技術行使(鞍部に到着して視界が開けてから次の移動先を定めたい場合などは、一瞬ナビゲーション距離がゼロになる)
・瞬時に移動先を定め直せるように技術行使の準備は早くしておく。
・使用技術の選択も当然ゼロになる前に済ませる(ブロックごとに決める、いわゆるプランニング)
・ルート選択も当然アタックしてパンチする瞬間(=ゼロになる瞬間)までに済ませる
2:8で現地→地図を重視する、現地先行
これはスイスで挑戦していたスタイルです。このスタイルでは、細かくプランは立てません。現地で移動先を定めるのが先で、それが地図上のどこなのかをあとから考えます。
そんな話いままでしてこなかったって?
そうです。実は、A (今いると思っている地点と実際の現在地のズレ)は技術を行使することで小さくできます。そうして小さくした状態で、それよりも許容が大きい特徴物に出会うことでミスなく特徴物の対応が成立し、再びズレがゼロになります。
まあ見ていきましょう。

①まず、ここは先読みができていなかったのでナビゲーション距離がゼロになり、止まって読みました。突っ込めばでかい特徴物(ズレの許容が大きい特徴物)がいっぱいあると判断したので、コントロールの方向へコンパスを振って移動先を定めます。そこからは大まかなコンパスと体感の方向という技術を使いつつ、周りの走りやすそうなところへ移動先を定めます。最初はまっすぐ進んでいましたが、汚いところ(たぶんB藪の中)を右に避けたくなって方向を変え、右のきれいそうな場所へ移動先を定め直しました。この右の方向がどのくらい右なのかをコンパスを用いて、移動先を定めた後から確認しました。そのまま走りやすい場所を見つけて移動先を定め直して進んでいきます。明るいところを登っていることも現地では把握しておきます(地図では読んでない)。さすがに左に行きたいと思っていたら通りやすい場所があったので左の方へ移動先を定め直して進みます。また後から方向は確認しました。そのときに、さっきはだいたいこのラフオープンあたりを登っていたんだなと確認します(まあその前から地図ちらちら見て目に入ってはいたかも)。そこからはまた通れそうなところを見つけては移動先を定め直して進みます。方向もちらちら見て、左の方へ進んできたことは見ます。ラフオープンが終わったことは現地で認識しつつ、藪切って進んでいたら突然崖が登場しました。ここで「これはズレの許容が大きい特徴物来た!!」と反応して地図を見ます。ラフオープンが終わって少し進んだ場所で、自分が進んできた方向も考えると地図上のこの崖しかありません。特徴物の対応が完了し、ズレがゼロになりました。
②~⑤あとは地図で見たいもの決めて拾ったり、現地からひろったりして丁寧に行きました。(略)
こんな感じです。重要な点は以下の通りです。
・先読みに時間を使わないでいいし、すぐ脱出できるし精密にルートを維持しなくていい(=ナビゲーション距離を取り直すのが速い)
・でもズレAをあとから小さくしつつ進むことに集中
・方向を変えたときなどにズレが一度大きくなったとしても、コンパスや記憶で小さく維持し、許容BよりズレAが小さい状態で特徴物を発見できたらミスの不等式がA<Bでミスが起こらない。
・そのためには、許容Bがそれなりに高くてズレをゼロにできるエリアがあると判断する必要はある(しかも深く読み込みことなく判断したい)
こんなスタイルも試していました。このあたりのテレインは視界も足場が悪く、地図→現地を重視するスタイルでは精密にルートを維持するコストが高すぎると感じました。そこで、どこでもいいからとにかく速く進める場所を選んだ方がタイムは速いと考えて試していて、悪くない感触でした。
小話 2つの真逆の意味を持つコンパス使用法
ここまでで2つのコンパス使用法が出てきました。わかりやすい状況として、長めのコンパス直進をイメージしてください。最初は進みたい方向へコンパスを振って進みますね。次にコンパスを見るときにどうするか。
①もう一度コンパスを進みたい方向へ振って直進する
よくやることだと思います。しかし、これではズレは大きくなる一方で、当たらなかったら終わりです。
②自分がどちらにズレているか確認する
これをおこなうことでズレが小さくなります。当たらなくても、ズレが小さいおかげで他の特徴物を拾えて修正できたりします。
もちろん、ミスが起こらないから①で十分って場面は多々あると思います。ぱっと見同じ動作に見えるのに行っていることは真逆なのが面白いですね。
実践編
0. 構成の説明
さて、理論編を読んで下さったみなさん。習得したいですよね。理論編を読んで、自分に足りないものを理解して練習が組める人は読まなくてもいいですが、そんなに簡単じゃないと思うので説明します。

まず1の座標を定めることの理解がベースになるので、それを理解してください。それ以降は、完全な順番付けはできませんでした。一応、2-1, 2-2, 2-3, 2-4の順に取り組み始めてもらうのが良いとは思っていますが、2-1が完璧にならないと2-2にいけないわけではないですし、というか2-1が完璧になるまで待っていたら効率が悪いです。ある程度できたら次に進み、あとから2-1の修正も加わることでしょう。という姿勢で2-1~2-4に取り組んでみて下さい。
とにかく大事なことは、2-1〜2-4に関しては課題発見と課題解決のサイクルを繰り返すことです。このサイクルを回した回数が多ければ多いほど理想のオリエンテーリングに近づくでしょう。課題発見の手助けはできるような内容になっていますが、課題解決の方法までは細かすぎるので書いていません。というか、他の技術論を見てもらった方がいいと思います。
1. 座標を定めることの理解
ペース:止まって、歩いてゆっくり
まずはこれを理解してください。止まって、歩いてゆっくりやってみてください。理論編で説明した通り、どんな技術レベルの人でも座標は設定しています。自分はどの距離に座標を定めているのか、座標を定めるというのはどういうことかを、森で止まってじっくり考えてみて下さい。遠くに目的のCPを設定していたとしても、あそこまで移動しようという座標は手前に置いてしまっている、ということはあると思います。よくわからなかったら、わかっていそうな人を連れて行ってたくさん喋りながらやってみてください。
2-1.「視界とちょっと」の理解(外部要因)
ミスの不等式に登場するズレAと許容Bは外部要因で変化すると理論編6で説明しました。外部要因は競技者には制御できないので、あわせてあげるしかありません。テレイン内をたくさん見て回ることで、外部要因に関する知見を深めてください。特に、A①の視界と、B②の特徴物が見える範囲、はいろいろなパターンを見ないとわからなくて難しいと思います。ここでは視界に関する説明をしておきます。
ペース:止まって、歩いてゆっくり
遠いナビゲーション距離という言葉の、「遠い」の意味は「視界とちょっと」だったので、視界の理解はとても重要です。習得して欲しいナビゲーションのベースとなります。
さまざまな状況での視界の最大限を知って下さい。テレインウォークが最も良いです。立ち止まって、360度を見回してみてください。ギリギリどこまで見えるかを見てみて、知識を蓄えて下さい。これもよくわからなかったら、わかっていそうな人と一緒に行くと良いでしょう。
長さを使い分けるという感覚はあんまりないです。視界最大と少し、を毎回行っていれば基本的に良いです。その結果として距離は増減します。
ヒントとして、視界の最大限に関わるものを挙げておきます。言葉での表現には限界がありますし、場面によってさまざまに変わることなので全てを網羅はできません。
・地形による遮りの有無
・高く突出して目立つ地形
・植生による遮りの有無
・明るくて突出して目立つ植生
・無限に生えている樹木の存在による距離の限界
こんなもんでしょうか。
2-2. 長いナビゲーション距離でミスしない(競技者要因)
2-1の「視界とちょっと」がそれなりに理解できたら、その距離に移動先を定めてみてください。でも、最初はミスが起こってしまうと思います。地形の向こうに沢があると思ったのに結構ずれていた、みたいなミスは起こると思います。(このときにやはり「視界とちょっと」に座標をやはり置けていない人は座標を置くことの理解に戻ってください。)このミスが起こった原因を分析してください。理論編で説明したミスの競技者要因のどれに当てはまるのかを考えればだいたい原因は分かると思います。そこまでできて課題発見です。どれに当てはまるのかがわからなかったら上級者と一緒に反省して一緒に考えてもらうようお願いしましょう。
<ナビゲーション距離を長くとってみたときのミスの競技者要因>
・Aの競技者要因
①ズレが大きすぎる技術を選択してしまっている(ズレの小さい技術を使うことをさぼった)
例:地形の相対位置も使わないといけなかったのにコンパスだけでナビゲーションした
④長く取ってみたものの最初に定めた座標がズレている
例:丁寧にコンパスを振ったつもりなのにズレていた
⑤最初に定めた座標はほぼ正しいが、向かう途中で座標がズレてしまう
例:足元を見ていたら移動先がどこだったかわからなくなった
(②,③は、ナビゲーション距離を長くとってみた、という段階まで達成できていたら起こり得ないです。)
・Bの競技者要因
①特徴物について認識している情報の質が低い
例:どんな形の尾根かわかっていなかったからすぐ近くを通ったのにわからなかった。
②現地で視界に入れている範囲が狭い
例:前と足元ばかり見ていて、すぐ横を通り過ぎた。
課題発見ができたら、それを解決するための練習を組みましょう。改善の仕方が分からなかったら上級者に相談しましょう。平日にできる練習もあります。
例:Omapのある公園で、コンパスで定めた移動先にぴったり特徴物が来るまで練習。ジョグのときに足元も見つつ視界180°を見る練習。
とは説明しましたが、現地→地図を重視するスタイルが好みで、ズレを小さくする技術の方を練習したいって人もいると思います。その方針もアリです。ですが、僕はそのスタイルで成長していったタイプではないので何から取り組んだらいいかわかりません。ただし言えることとして、そのスタイルでも地図→現地を完全に無にはできません。特にアタックまわりは地図から行う必要があると、僕は思っています。ですので、コントロールが見える範囲が狭いような難しいアタックのときに長いナビゲーション距離が取れるような練習はしておくべきだと思います。
2-3.プランの最適化
ここまでのことが習得できてくると良いプランが立てられると思います。徐々に成長するものだとは思いますが、最終的にはこのレベルになっているといいなというのを紹介します。
・ルート決定は最速ルート
・アタックはズレの許容が小さいことに気をつけAPを置くと良い
・毎回最大で置き直すわけではない
1点目2点目はいいと思うので、この3点目の説明をします。どんなプランを立てると良いかというと、コストパフォーマンスを最大化するプランです。
このコストは時間を指します。技術の行使には時間がかかります。しかも、その必要な時間は、行使する技術によってバラバラです。できるだけトータルで短い時間で済むといいですね。
どんなときにパフォーマンスが高いかというと、他の地点に比べて長くナビゲーション距離を取れるときにパフォーマンスが高いです。
要は、遠くが見えるときにナビゲーションにコストをかけると良いです。そのような視界が開けるであろう地点がすぐ近くなのであれば、今度はコストを下げていいです。視界が開けるであろう地点がすぐ目の前なのに、「視界とちょっと」の距離でナビゲーションを頑張ってもコストがもったいないです。この考えのもと、最適なプランを立てましょう。
2-4. スタイルの確立
ここまでできればだいぶ速いですが、理論編(発展)でも述べたように、ナビゲーション距離がゼロになって止まる前にできるだけ早く移動先を定められるように、スタイルを確立すると日本ではトップレベルになれるでしょう。そのための下準備としてまず、習得済みの技術のリストアップを行います。
・直進できる距離、足場や見通しでどのくらい変わるか
・先読みができるか
・狙った特徴物へ視線を送るのができるか
・広く視界をとって特徴物を捉えられるか
・微地形のイメージができるか
などなどいっぱいあると思います。
これをもとに、自分に適しているスタイルを見つけて目指すスタイルの決定を行います。自己流でやると結構危険なので、誰かと相談するといいと思います。目指すスタイルが決定できたら、次はこれから習得しなければならない技術のリストアップを行います。このときに、
・長いナビゲーション距離でズレが小さい技術
・ズレの許容を大きくする技術
・ズレを小さくする技術
・滑らかに実行するための技術
のように、目的を分けて考えるといいと思います。そして、その能力を上げるためのトレーニングをしましょう。これでみんなも日本のトップオリエンティアです。
あとがき
ナビゲーション距離を長くするというなんとなくの概念は持っていましたが、この技術論を書くまではちゃんとは言葉にしていませんでした。ですが、いざ本気で説明するために考えてみると、思考が進みまくってしまいました。ナビゲーション距離、と言うけど、ナビゲーションってどういう定義だろうか。そう考えたら定義ができてしまいました。長いってなんだ。ミスしない範囲で最大だな。じゃあミスってなんだ。ズレの不等式で表現したらわかりやすいな。どうやったら習得してもらえるかな。といった具合に。思考が進みすぎて、自己肯定感が上がりまくりました。
1年前の段階ではスタイルに関しては曖昧な表現でしたが、今回はそこに修正を加えて、スタイルに関しても結構説明できたと思います。WOCの時期現地→地図のスタイルに挑戦していて、そのとき本庄と話して結構整理できました。感謝です。
いろいろと感想をくれて実践してくれた東大OLKのみんなにも感謝です。
本当はもっと図があるといいのかと思いますが、時間不足でできませんでした。読みづらかったらすみません。わからないことがあったら気軽に質問してください。
この記事が気に入ったらサポートをしてみませんか?