
捕捉の発達における姿勢,視覚,手の操作の協調(Postural, Visual, and Manual Coordination in the Development of Prehension)

【要旨】
6ヶ月から12ヶ月の乳児38名(全員が一人座り出来る)と成人8名でモノの捕捉におけるリアルタイムでの姿勢,視覚,手の操作のつながりを調査した.参加者の課題は様々なスピードで回転する電動の椅子に座りながらターゲットをつかみ取ることである.頭部につけたアイトラッカーにより視覚活動が記録され,ビデオにより姿勢と手の活動が捉えられた.捕捉は姿勢-視覚-手の操作の順で協調的に行われ,まず頭部・体幹が回転してオモチャを視野内に入れ,今度はそれがリーチ開始を引き起こしていた.オモチャへの注視によりその位置が確認され,手によるオモチャへの接触と回収をガイドしていた.捕捉は速い回転ではパフォーマンスが低下するものの,素早いプランニングおよび行為の実行がよりよいパフォーマンスを予測するものとなっていた.
【本文一部抜粋】
捕捉にはミリ秒内における多システム間での時間的・空間的に的確な協調が必要とされる.
これまで捕捉における個々の構成要素に関しては詳細な理解を得られてきたが,リアルタイムでの,もしくは発達を通じた構成要素間での協調についてはほとんど知られていない.
本研究の目的は姿勢,視覚,手の操作の時間的・空間的協調を調べることにより,モノの捕捉が発達することの全体像を得ることである.
Method
Participants
6ヶ月から12ヶ月の乳児,平均9.04ヶ月の乳児38名(男児18名)で調査した.
Apparatus and Procedure
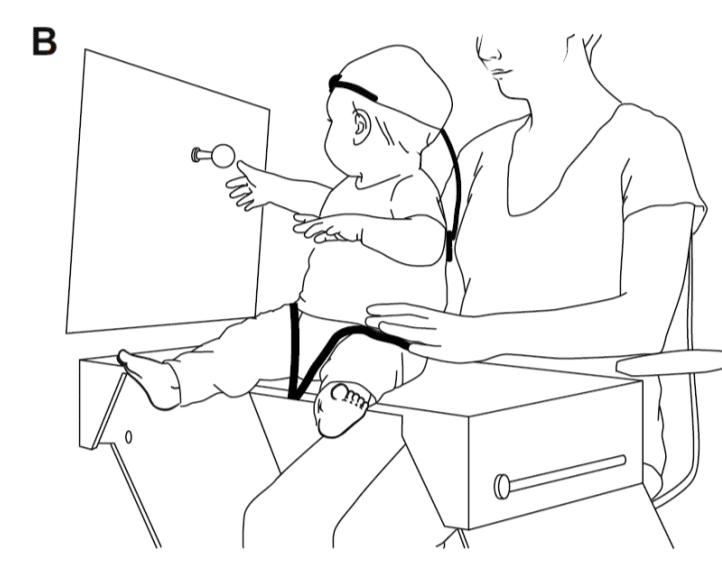
乳児は電動で動く椅子に取りつけられたベンチの上で大腿部にストラップ巻いて座る.乳児は45×45 cmのボードにマグネットで様々な高さ(目の高さ,または胸の高さ)に取りつけられた小さなオモチャ(3 cm未満)にリーチする.
トライアルは参加者が実験者と向かい合うところから始まる.特注のソフトにより椅子を180度(椅子はオモチャのところで止まる)または360度(椅子は実験者のところで止まる)回転させる.
椅子は乳児に関しては「ゆっくりと」(35度/秒)と「素早く」(70度/秒)で回転する.
Data Coding
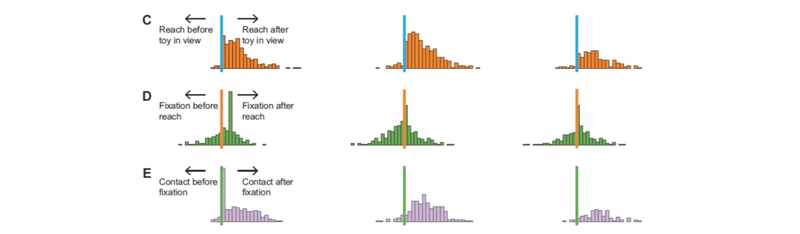
リーチに関してコード化したのは頭部・体幹の回転が開始;オモチャが視野内に現れる;リーチが開始する(オモチャに向けた持続的な腕の動き);オモチャの注視(3フレーム以上のオモチャへの眼球定位);オモチャへの接触;そしてオモチャの回収(オモチャがボードから取り上げられる)
Results
Prehension Performance
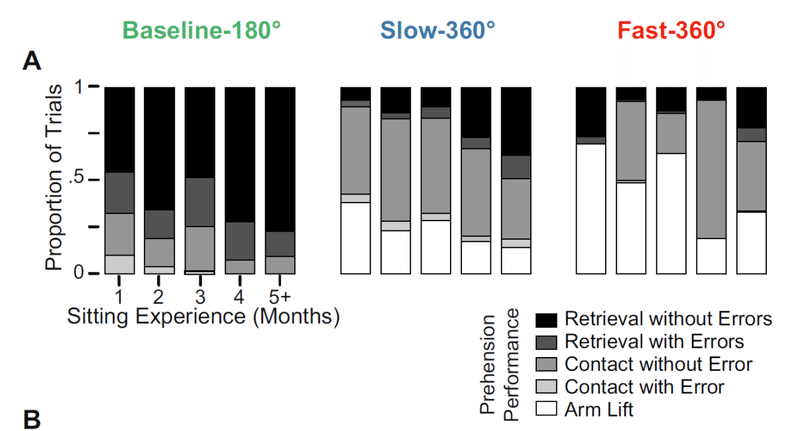
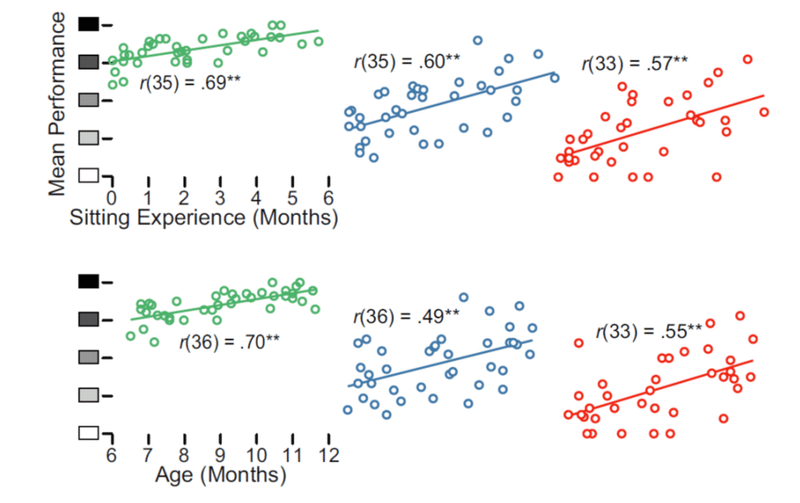
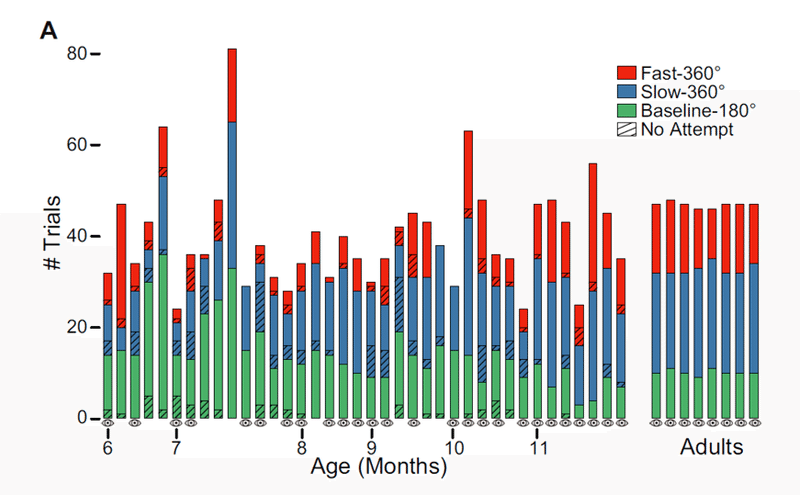
図Aの黒いバーおよび図Bの最良適合線が示すように,年長で座位経験が長い乳児ほどよりよいパフォーマンスを示している.
Spatiotemporal Sequence of Actions
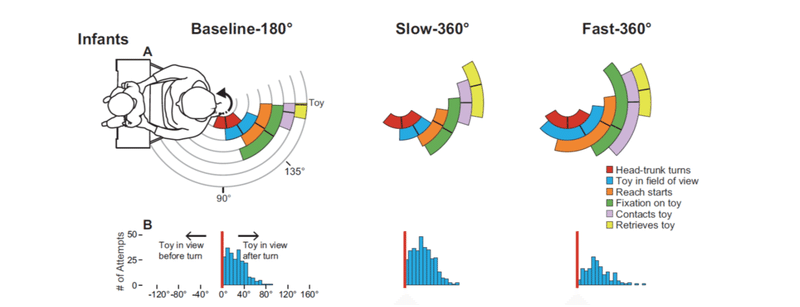
図Aの色のついたリングは椅子が回転しているときに姿勢,視覚,手の操作それぞれが参加している平均範囲を示している(黒線はグループごとの平均を示している).
姿勢,視覚,手の操作はすべてのトライアルで見られた.
さらに,乳児がトライアルにおいて姿勢-視覚-手の操作を結びつけるとき,その行為は時間的な順序のなかで起こっていた.
すべての課題を通じての平均的な割合を見ると,乳児の頭部・体幹の回転は視覚的にオモチャを同定するより前に起こり,視覚的な同定はリーチが開始されるよりも前に起こり,注視はオモチャへの接触よりも前に起こっていた.乳児がすべての姿勢・視覚活動を行ってオモチャに接触したとき,そこには頭尾の順序が見られた(まず頭部・体幹を回転させ,それから視覚的にオモチャを同定し,腕を持ち上げて・オモチャを注視してから接触する).
乳児のパフォーマンスは基準となる180度条件の方が360度条件よりも優れていた.また,ゆっくりの360度条件の方が素早い360度条件よりも優れていた.360度条件では行為の開始が早いとその後のパフォーマンスが優れている.
Discussion
Real-Time Cascade of Postural, Visual, and Manual Actions
この知見は幼い乳児の予測的なコントロールおよび姿勢,視覚,手の操作の時間的・空間的な協調を初めて示したものである.
加えて,予測的なコントロールはより良い捕捉のパフォーマンスと強く関連しており,乳児が手の行為を調整して素早く動くオモチャを掴むという先行研究と同様のものである.
2つ目の重要な知見は,モノの捕捉は組織化された時間空間的なシークエンスによって行われている-リアルタイムでの知覚‐行為のつながり(real-time perception-action cascade)-であることだ.乳児はまず頭部・体幹を回転させ,視覚的にオモチャを探索してから腕を持ち上げ,オモチャを注視してからそれに触る.
最初の振舞いが次の振舞いの情報を生成している(earlier behaviors generate information for later behaviors).
さらに,最初の行為が失敗すると後の行為が妨げられる.椅子の回転が速くなるとリアルタイムでのつながりが壊れてしまうのだ.モノの捕捉における予測的なコントロールはシンプルに思われるかもしれないが,そうではない!行為は変化しつづける環境に適応するよう選択され,タイミングを合わせ,形を整えられているのである(Gibson, 1979).
Coordination of Postural, Visual, and Manual Actions Across Development
オモチャへの視覚的な興味は早期から始まる:新生児は視野内にあるモノを注視する.3-4ヶ月までに乳児は姿勢を支えられればモノに触ることができ,5ヶ月までにモノを掴むことが出来る.6ヶ月までには乳児は一人座りが出来るようになり,じっとしているときは目-頭-体幹を方向づけてモノにリーチすることが出来るようになる.
座りたての乳児を含むすべての乳児は捕捉に必要な回転(turning)と見ること(looking),そして腕の動き(arm movement)を組織化していた.しかし座ることの出来ない乳児にはこれが出来ない.それゆえ,座ることを学ぶということはじっとしているときでも動いているときでも-日々の生活で共通するシチュエーションである-周囲を見渡してモノを扱うために必要な条件を用意するということである.座位は視覚および手の発達のながれ(cascade)を引きおこし,視覚という意味でも手の操作という意味でも世界とつながる,もしくは「捕捉する」ための新しい方法を開始させるのである.このようにして,それまでに発達してきたスキル-ここでは視覚と手の操作-を利用するには十分な座位のコントロールが同調して役割を果たすのを待つ必要がある.姿勢がボトルネックなのである.
乳児の掴むスキルで見られるように,行為のスピードは成熟した協調性にとって極めて重要な要因である.より素早く姿勢-視覚-手の操作のプランニングを行うことにより適応的に,正確に応答するための十分な時間を持つことが出来る.
この記事が気に入ったらサポートをしてみませんか?