
ぼうけんヤドカリを作ってみよう!

この記事では、ぼうけんヤドカリのつくりかたを紹介します。
工作レベル:★★☆
制作時間:3時間
使うもの
・ユカイなぼうけんクラフトキット

1.足をつくる
15cmくらいに切ったストローの両側にモーターを固定します。

7cmくらいに切ったストローをそれぞれ輪ゴムでクロスに固定して足をつくります。

モーターの軸にテープを巻きつけ、

足をつけます。

2.骨組みをつくる
2本のストローを輪ゴムで下の写真のように固定します。

そして、モーターをつけたストローに固定します。

両側が出来たら、下の写真のように、10cmくらいに切った2本のストローを輪ゴムで固定します。

さらにストローを追加します。次の3枚の写真の手順で固定します。


これで骨組みが完成です。

3.目をつける
5cmくらいに切ったストローの先に目を貼り付けて、それを輪ゴムで骨組みに固定します。ストローの目をつけるところを、つぶして平らになるようにすると貼り付けやすいです。

4.殻の模様をつくる
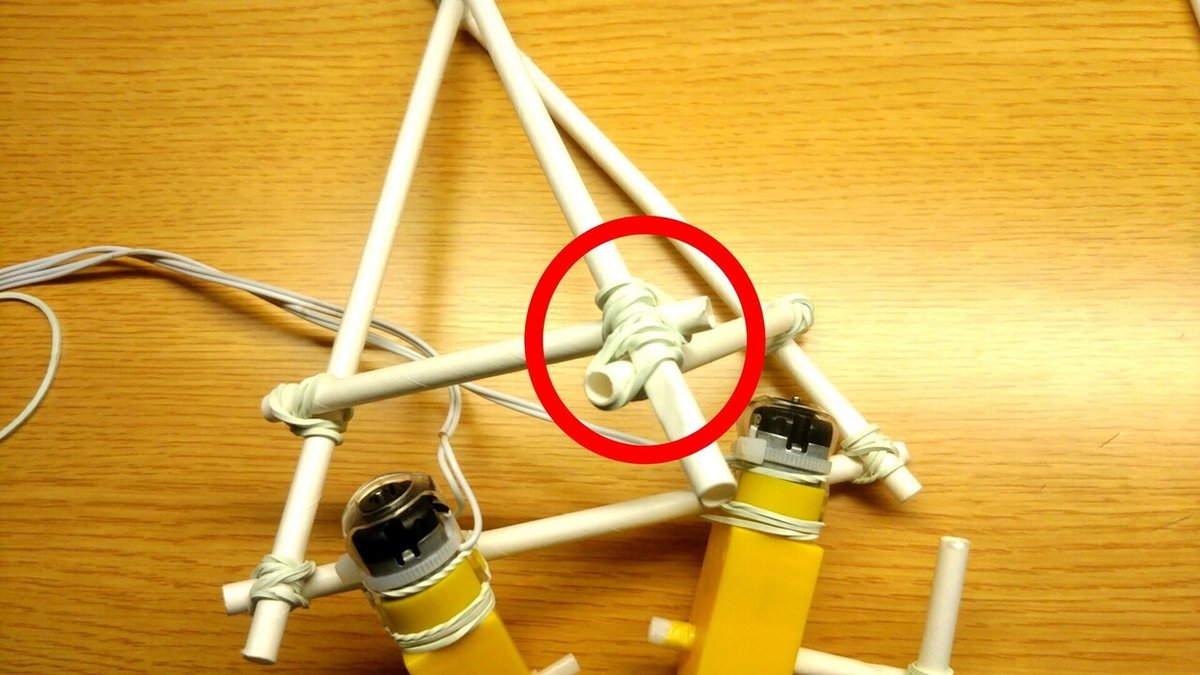
ストローを下の写真のようにつけて、模様をつくります。
赤い丸のところは輪ゴムで固定します。
青い丸のところはストローを折り曲げます。

5.速く歩けるようにする
足のストローの両端に切り込みをいれます。

そしてその切り込みを使って輪ゴムをつけます。

これで輪ゴムが滑り止めとなって速く歩くことができます。
完成です!

元気なヤドカリでおうちをぼうけんしましょう!

この記事が気に入ったらサポートをしてみませんか?