噂の遅延ゼロ!最速の制御基板を試す!スト6向け最強レバーレスを自作する #4

前回は、完全に手作りのレバーレスアケコンで、最低限の動作確認ができるところまで作れました、というのが前回までのお話。
前回自作したアケコンは、快適にプレイできています。まだ試作品ではありますが、もう中国製の格安レバーレスには戻れません。さすが三和ボタン、圧倒的に使いやすいです。
ボタン配置の試作を何度も繰り返し(この話は長くなるので後日書きます)、一旦落ち着いたので、今日は入力遅延のさらなる軽減を行いたいと思います!
最速の制御基板
今使用している基板は、Brook基板(Brook ZPM002M ZERO-Pi Fighting Board EASY)です。
この基板は入力遅延の性能でいうと、最高ランクに位置する、非常に性能が高いものであるらしく、市販のアケコンと比べてもトップクラスの遅延の少なさを誇るらしいです。
しかし、
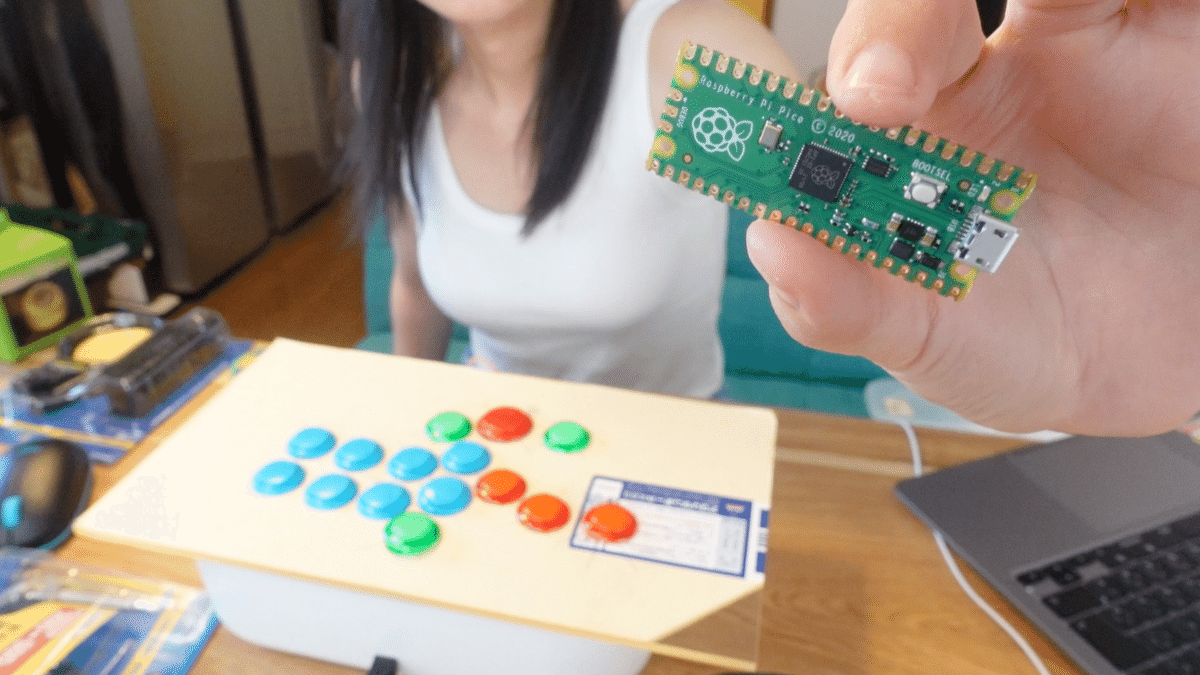
入力遅延の少なさにおいて、さらに高いポテンシャルを持つ基板があるらしいのです。それが、ラズパイPico基板です。
・Raspberry Pi Pico
このラズパイ基板は、ゲームコントローラー用というわけではありませんが、ゲームコントローラーとして動作させるためのプログラム(ファームウェア)が無料で公開されているため、それをインストールすることで、ゲームパッドの基板として使用可能になるのです!
Raspberry Pi Pico+GP2040の驚くべき性能
そして、その性能について、詳しく検証しているのが下記の動画です。
この動画によると、Brook基板の上位機種とラズパイ基板で、同時入力のテストを行った結果はこうなっていました。

動画によると、環境によって結果が変わる可能性があるとのことですが、少なくとも検証環境では、ラズパイ基板が圧勝していました。
今回の自作のテーマは「最強レバーレスの自作」ですので、最強を目指す以上、より性能の高い基板を使うしかありません!
ラズパイ基板をゲームコントローラーにする方法
ラズパイピコ基板こと「Raspberry Pi Pico」をゲームコントローラにするには、GP2040というファームウェアをインストールする必要があります。
…と改めて調べながらこの記事を書いていたら、どうやら最新の開発はGP2040-CEというプロジェクトみたいですね。今知りました(笑
こちらをみると詳細な遅延時間が掲載されていました。
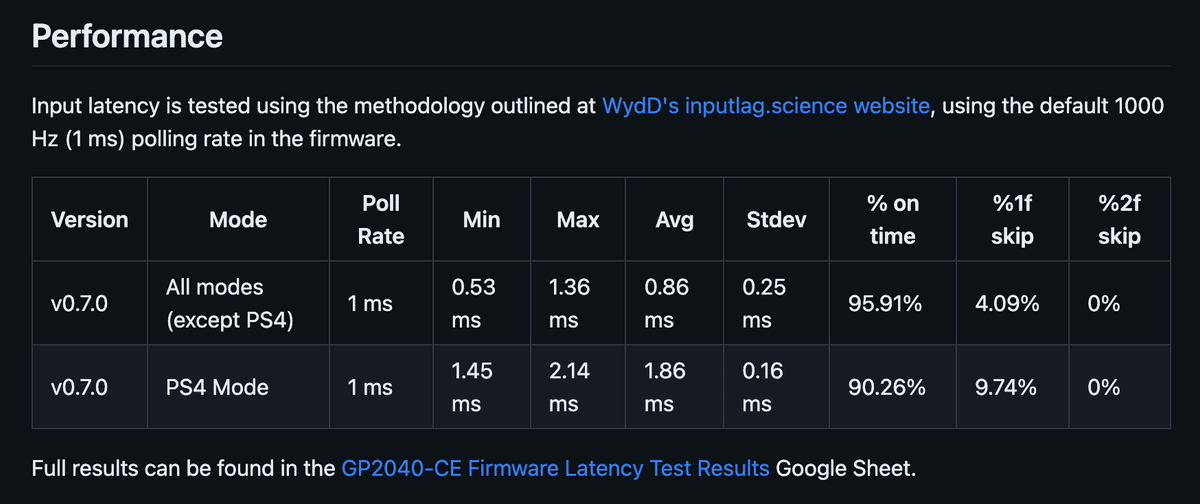
最大でも1.36msです!
1フレームが16.666…msですから、限りなくゼロに近いです。
ファームフェアのダウンロード
というわけで、GP2040をインストールしました。
が、この記事の執筆時点で、GP2040-CEを知ってしまったため、最新のGP2040-CEをインストールする手順を記載しておきます。
どちらにしても、githubからファイルを1つダウンロードしてきて、コピーするだけです。ダウンロードとコピーはPCから行います。
このサイトから「GP2040-CE_0.7.4_Pico.uf2」をダウンロードします。
ファームウェアのインストール
ファームウェアをPCにダウンロードしたら、Pico基板とPCをUSBケーブルで接続します。
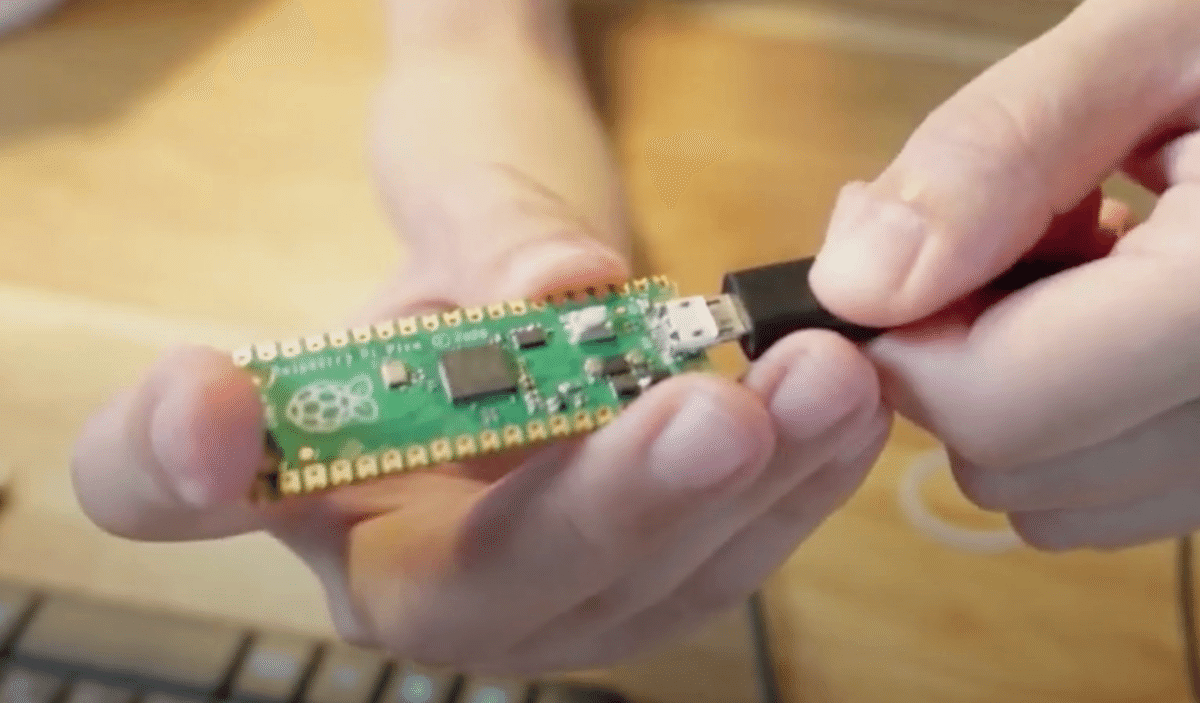
ケーブルを接続する際、基盤上の白いボタンを押しながら、ケーブルを繋ぎます。そうすると、PCから外部ストレージとして認識されるので、そこにダウンロードしたファームウェアのファイルをコピーします。私はWindows11を使用して、コピーしました。
無理やりスト6のキャラを操作してみる
ゲームコントローラーとして、Windowsが認識してくれたので、本当にこれでゲームを操作できるのか試してみました。
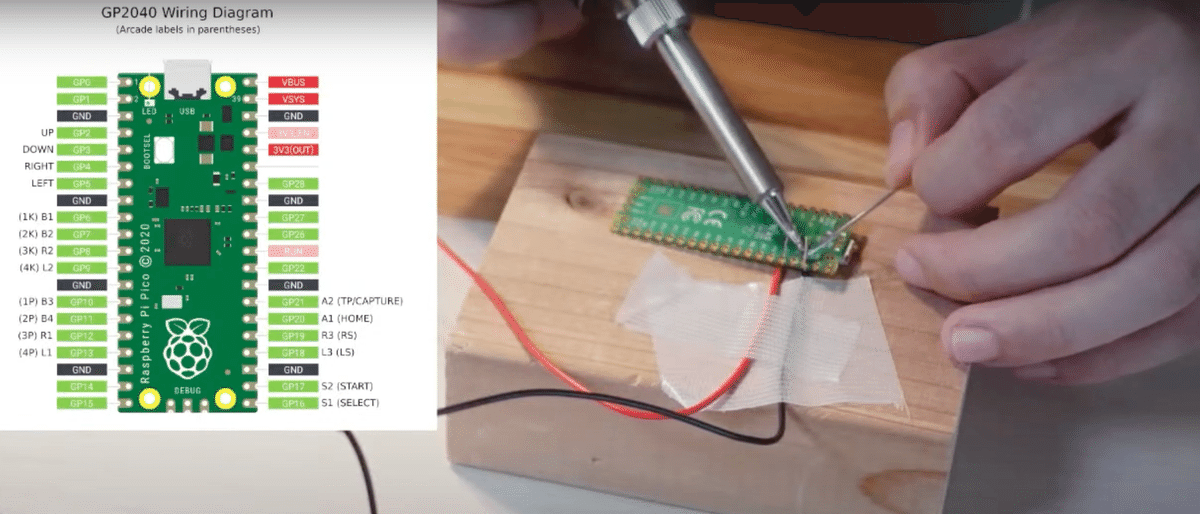
GP2040の端子の割り当てを見ながら、GNDと各ボタンを無理やり接触させてみます。すると、スト6のキャラが動きました!

動作確認ができたので、安心してボタンの接続に進みます。
半田付けでケーブルを接続
ケーブルは、Brook基板用のものを使ってみることにします。これを根本で切ります。切断した側はPico基板に一本一本半田付けし、逆側はボタンと接続するための端子になっているのでそれをそのまま流用することにします。

一本一本地道に半田付けしていきます。
そして!完成しました!!!
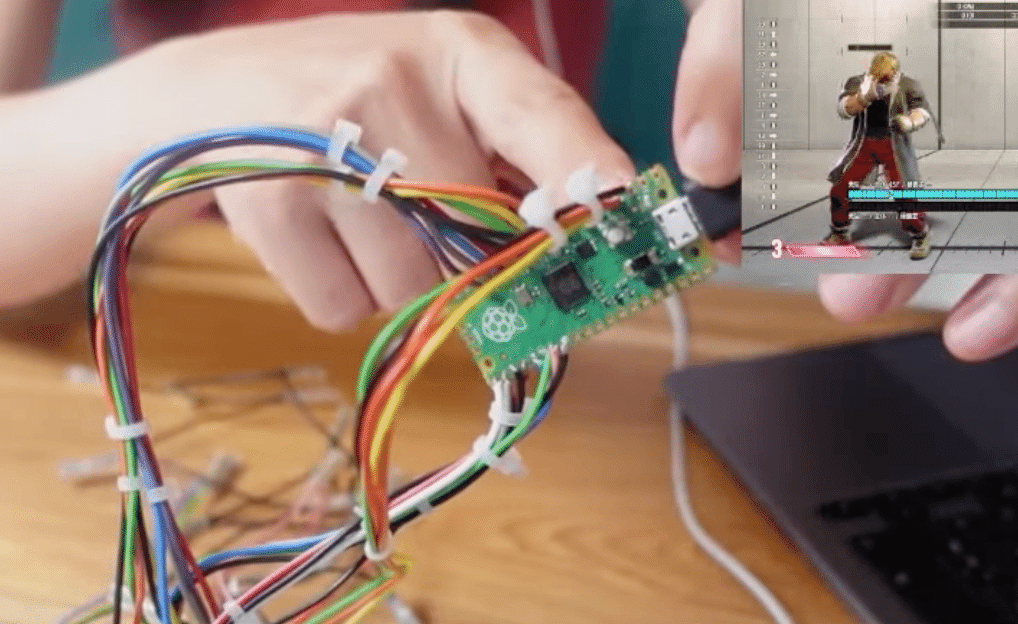
動作テスト
操作確認してみます!

ちゃんと動きました!!
そして、問題の遅延は・・・

違いがわかりませんでした(笑
もともと使用していたBrookの基板もめっちゃ優秀なので、体感では違いがわかりませんでした・・・
一応、ちゃんと動いているので、遅延がより小さくなったと信じて、改善成功としましょう(笑
まとめ
・Brookの基板は十分速いし別売りの専用ハーネスを買えば半田付け不要でお手軽
・Raspberry Pi Picoはより遅延が少ないという情報あり。ただし半田付けが必要。コストは安い
・BrookにはPS5に対応したボードもあるが価格がめっちゃ高い
こんな感じでしょうか。今回の最強レバーレス制作では、Raspberry Pi Picoを採用することにしました。理由としては、遅延が少ないという情報があったので、最強を目指す以上多少面倒だろうがこれしかない!ということです(笑
次回は、これまでに得たレバーレス制作の知見を全て集約し、最強のレバーレスを完成させたいです!!
この記事が気に入ったらサポートをしてみませんか?