Mavic 3 Proで無理やり測量する(その2)

今回は、Mission Plannerというソフトを用いてフライトプランを作成し、オルソモザイク画像(合成画像)を合成するまでのざっとしたメモを書き留める。
Mission Plannerで、測量対象地をポリゴンで選定する(忘れずにポリゴンを.polyファイルとして保存しておこう)。測量に用いるドローンのカメラスペックを入力し、前後左右のオーバーラップを設定する。今回はMavic 3 ProのHasselbladカメラで、対地高度80mのフライトである。このドローンは2秒おきのタイマー撮影(インターバル撮影)が可能なので、計算上は前後のオーバーラップ率が90%以上になるはずであった(実際には80%程度のオーバーラップ率になった。なぜだろう?)。サイドラップ率は86%として、グリッド撮影プランを作成。具体的なやり方は他のウェブサイトを参照すべし
Mission Plannerが書き出す.waypointsファイルをExcelで開き、ウェイポイントの座標情報をLitchi形式の.csvファイルに転載し、事前に対象地のDEMを読み込んであるLitchiのMission Hubで開く。するとMission Plannerで作成したフライトプランが表示される。対地高度が80mになるように設定。.kml形式でエクスポート
前の記事にあるWesさんのサイトで.kmzにオンライン変換する。そしてDJI RCにアップロードし、ファイル名を変更して読み込む
DJI RCで、機首方向(Mission Plannerが提示した機首方向をすべてのウェイポイントにアプライ)を設定、ウェイポイント1でジンバルが-90度を向くように設定、フライト速度を4m/sに設定
フライトの際は、静止画 --> タイマー撮影 --> 2秒を選択して実行する。2秒おきにシャッター音が鳴り響くので、慣れることをお勧めする
というわけで実際にフライトしたところ、首尾よく一定間隔での静止画撮影に成功した。これをMetashapeで合成した結果は以下のとおりである。ちなみにMetashapeは有料ソフトであるが、オルソモザイク合成をしてくれる無償ソフトを利用することも可能であろう。
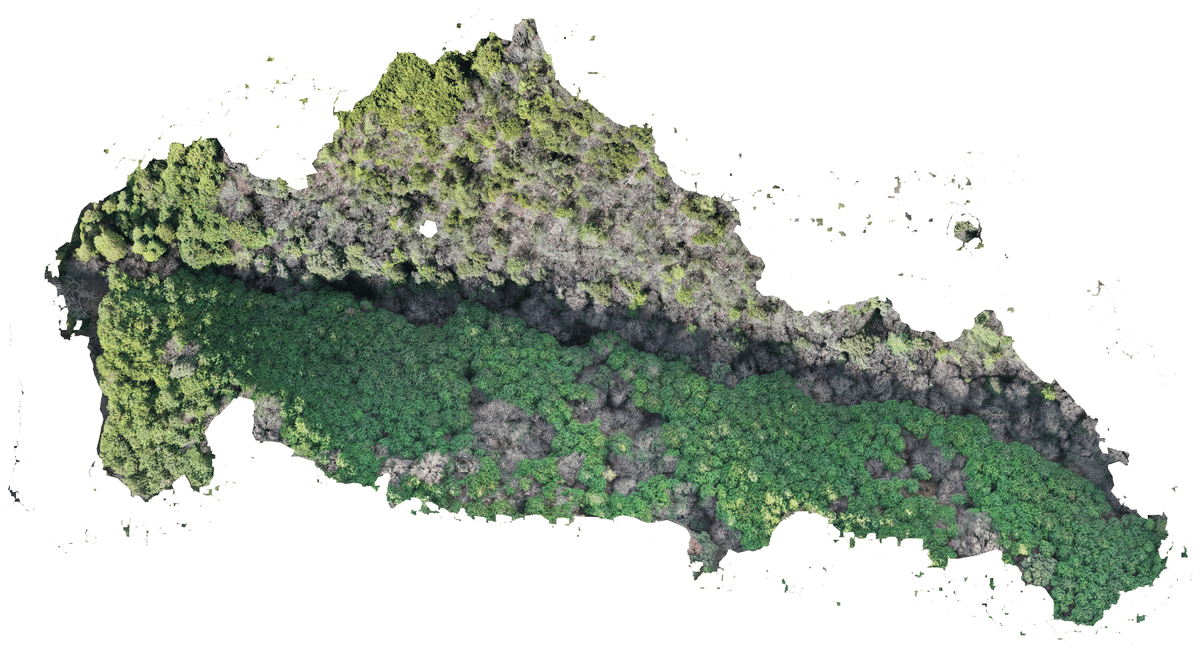
このように、対象地のなかに一か所だけブランクができてしまったが、合成はおおむね良好な結果となった。ちなみに全体図の長辺は約200mで、対象地内の標高差は約100mである。Litchiをかませることで国土地理院のDEMを使った地形追従飛行が可能になったため、標高の低いサイド(左側)も、標高の高いサイド(右側)も、同程度に精細な撮影ができたのである。もし地形追従をしなければ:
左からスタートして右に飛んでいくとすれば、樹木にひっかかって墜落する
右からスタートすれば左の樹木がはるか遠くに小さく写ってしまう
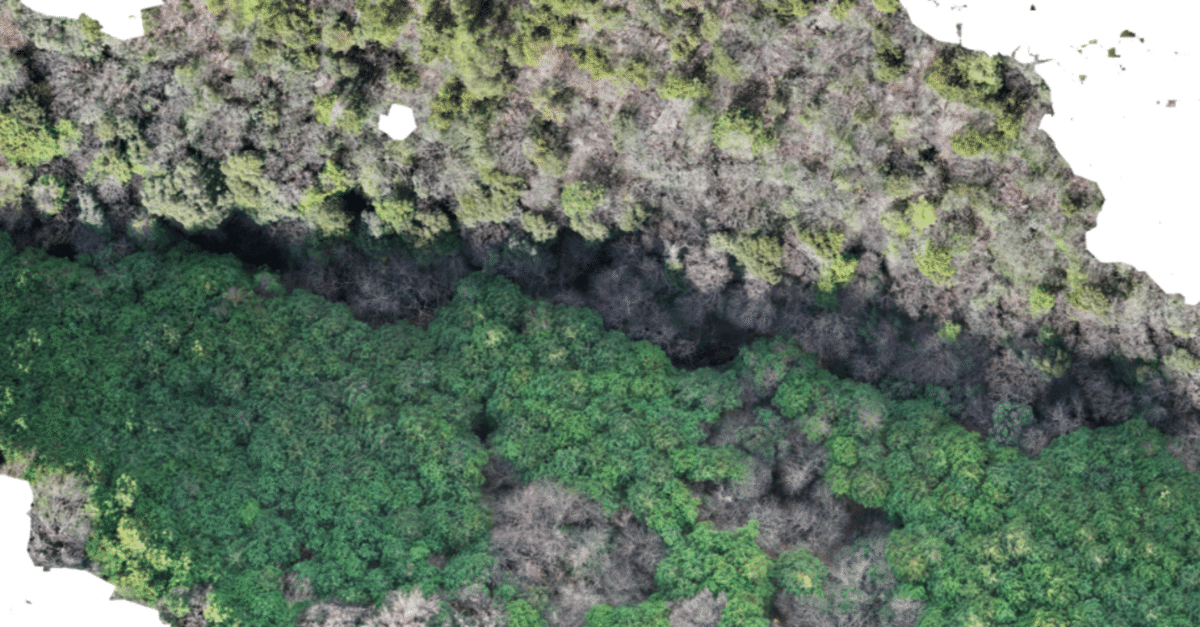
という問題が生じるところだったのである。以下は等倍で表示した部分図である。

このように樹木の枝や葉のディテールまで見えてしまう。高価な産業用ドローンを水平飛行させる測量結果に匹敵するほどの性能と言ってよいだろう。これはMavic 3 Proが搭載するカメラ(レンズ・センサー)とジンバルの優秀さのおかげでもあるが、かなりの力技で地形追従自動飛行と自動撮影を実現するという涙ぐましい努力のタマモノである。
以上はドローンユーザー万人にお勧めできるものではない。執念深いオタク気質と、低予算の制約に拘束されない大きな野望を持つ者が挑戦すべきテーマである。
この記事が気に入ったらサポートをしてみませんか?