運動学習と姿勢制御_4893文字

はじめに
私達は、地球という重力環境下で生活する上で、姿勢制御(≒支持基底面に対する重心制御)と運動制御が必ず求められます。これら2つの制御を効率的に行うためには、何が必要となりますでしょうか?
それが「運動学習」です。
荒削りな動作から効率的な動作への移行に向け、トライ&エラーの中から多様性というバリエーションを伴ったを自分の「型:パターン」を学び、無駄や力みが少ない(エネルギー消費量が少ない)効率的な運動を学習します。
ベルンシュタインは「繰り返しのない繰り返し(repetition without repetition)」 という言葉を用いて表現しており、行為→知覚→行為→知覚という繰り返しのサイクルの中で、毎回少しずつ「状況:例えばリーチする際の姿勢の違い」や「環境:例えばリーチ目標の位置の変化」、「文脈:どういう流れの中でリーチするのか?喉が乾いてるから、おもちゃを触りたいから」が異なりながら運動を繰り返すという意味を持ちます。
「繰り返しのない繰り返し(repetition without repetition)」
リハビリテーション場面で考えるといかがでしょうか?
歩行を目標とする際に、歩くための歩行練習だけではなく
・使った枕をタンスに戻す中での歩行練習
・トイレに行くまでの歩行練習
・会話しながらの歩行練習
など複数の要因を考慮しながらの歩行課題(2重課題)も重要な練習ではないでしょうか?
2つの学習
順序学習(連続的運動学習 or 強化学習)と適応学習の2つに別れます(下図)。

(順序学習)
大脳基底核が中心となり、記憶に基づき順序を学び、報酬に基づき順序を記憶します。
例えば、
「褒める」ことも学習を促進することになります=学習を強化する(下図)。
Dobkinら(2010)は、治療後の10mを行い、ポジティブフィードバック(褒める)を行なった群は、行わなかった群と比較し、歩行速度が有意に増大したことを報告しています。
この論文を読んだ際に自分自身の臨床は、褒めることよりも出来ないことに目が向きやすく、褒める機会がとても少ないことを振り返る機会になりました。

では、ただ褒めるだけでいいのでしょうか?
ポイントは、課題設定になります(下図 : Schultz et al. 1997)。
・予測していない際に、報酬(成功)が得られた場合
→ 強化学習を促進することが可能となります
・予測していて、報酬(成功)が得られた場合
→ 学習の定着に繋がります
・予測していて、報酬(成功)が得られなかった場合
→ 不使用の学習を学びます

適切な課題設定に基づき、報酬(褒められる)が得ることで学習が促進され、
成功が予測される段階となることで定着が促される
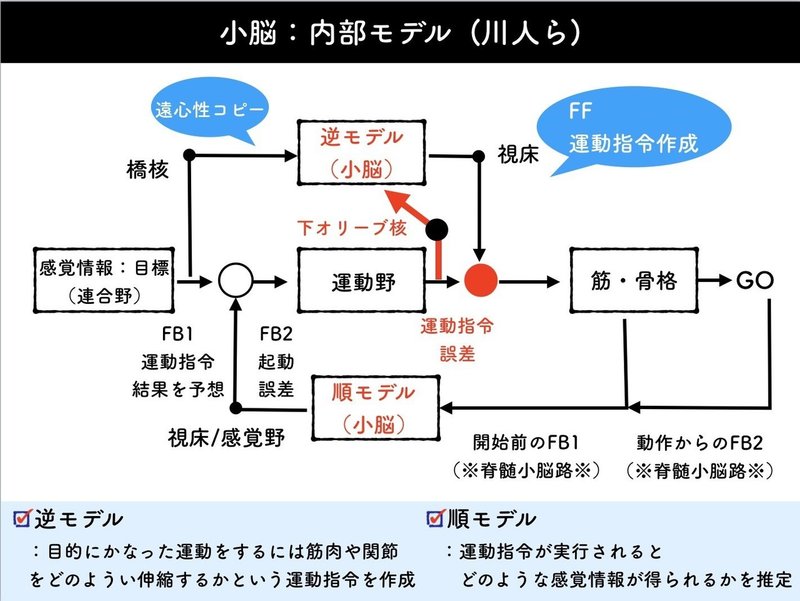
(適応学習)
小脳が中心となり、感覚情報に基づいて行う運動学習です。教師あり学習とも呼ばれ、感覚情報から運動指令生成までの変換過程(内部モデル)が重要であり、その変換過程(内部モデル)においてトライ&エラーを学習します。内部モデル。詳細は説明を行わないため、下図をご参照下さい。
例えば、
リーチ動作で考えた際、大きく2つの状況が求められます。
①自分の姿勢や四肢の位置関係などの内的状況
②目標物の距離、目標物の形などの外的状況
これら2つの状況に対し、リーチ動作を行い成功する、失敗するという成功体験は先程述べました強化学習に寄与しますが、そのリーチ動作の質=効率性に関しては適応学習に関わります。
具体的には、
①リーチ動作中の姿勢制御=バランスは対応可能か?
②リーチ動作中の運動制御=リーチの軌跡は目標物に対して直線上か?
などのリーチ動作の質=効率性を学びます。
その際、重要なことは失敗の種類や意味です。
患者の失敗の多くは、定型的な失敗(同じ失敗=バリエーションの少ない失敗)を繰り返し、常に同じ感覚で同じ運動経験となります。そのため、失敗から成功を導き出すことが難しく、多様性を学ぶ機会が少ない状態となります。その一方で、健常者は失敗から成功を学習します。その要因は、失敗に対し修正可能な姿勢運動制御能力があることで、新しい運動感覚/経験にトライすることが可能となるためです。そのため、運動学習を学ぶ際には姿勢制御と感覚入力の特性を知っておくことが推奨されます。
以上の2つの学習を一連の動作の中で考えてみます。
例 = 初めて自転車に乗ることが出来る
課題に対して挑戦(実行)します。その際、成功に向けて感覚入力に対する姿勢運動の修正が行われます。自転車を乗りはじめの際は、ふらつきながら何とかバランスを保とうとします。この時、主にバランスやハンドル操作などの自転車への適応を修正しているため、作用しているのは主に適応学習となります。そして成功体験が徐々に出来始めるにつれて、バランスのとり方をより駆使して神経ネットワークを強固にします=強化学習と考えられます。
つまり、新規課題に対して挑戦し、その誤差を検知、修正する=適応学習、
そして修正した内容を強化すること=強化学習が「運動学習過程」となります。
臨床と運動学習
臨床場面で大切にしている点は、大きく3つです。
①課題設定
②感覚システムの準備
③マネージメント
●課題設定
課題設定はとても重要で、全体課題・部分課題が存在します。
全体課題は言葉の通り、歩行が目標であれば歩行を課題に設定し、部分課題では麻痺側立脚後期の股関節伸展位での足関節の制御などと具体的な課題を設定します。
その際、考慮しなければならない点は複雑性です。複雑性とは、課題の構成要素の数と対象者の情報処理過程によって決定され、複雑性が低い課題に対しては部分課題を、複雑性が多い課題は全体課題を選択することが望ましいと報告されています。このため、対象者とのコミュニケーションの中で目標設定(SDM:Shared Decision Making)を行いますが、同時に対象者の情報処理過程も考慮し、部分課題か全体課題かどちらが望ましいかを療法士は判断する必要があります。

●誤差の検知修正に向けて感覚システムの準備(適応学習)
感覚入力の章でお伝えしましたが、脳卒中後遺症者の60%は感覚障害を呈するとの報告(Careyら1993)もあり、感覚入力を増やしていくことはとても重要となります。特に、自分が求めたい課題の構成要素を明確化することが望ましく、どの部位に感覚システムの準備を行いたいのか?を考える機会になります。
例えば、麻痺側立脚中期〜後期の安定を目標課題に設定した際に(下図参照)、全体課題では
・可動性:足関節背屈、膝/股関節伸展
・筋活動:下腿三頭筋の遠心性制御、膝伸展筋/股関節伸展筋の求心性制御、
体幹の抗重力伸展活動
・姿勢制御:予測的な体幹の筋活動、反応的な足部の筋活動
などが挙げられます(かなり簡略ですがご了承下さい)。
しかしながら、対象者は立位での治療は情報処理過程で上肢の連合反応が強く、姿勢制御として体幹の予測的な筋活動は得られず、足関節もクローイングを認めたため、固有感覚系ではなく前庭系が有意な感覚処理と考えました。
以上から固有感覚の処理過程を増やすために、背臥位の肢位を選択して足部や膝伸展筋の活性化を行い、立位における感覚処理の準備を行うなどが例として挙げられます。

●マネージメント(強化学習)
成功体験をすることで、その神経ネットワークが報酬に基づき強化されます。そして、療法士は可能な限り強化されたネットワークをADLへ結びつけることが求められます。例えば、日常生活における麻痺側上肢に関する運動を対象者に学習させ、ADLへの参加=行動変容を促すことが推奨されます。
では、我々療法士は行動変容のために何を考える必要があるのでしょうか?
それは個人的に自主練習というマネージメントだと考えています。
マネージメントというと対象者「を」マネージメントするという意味に捉えられやすいのですが、重要な点は対象者「と」マネージメントするという表現だと思います。
2015年世界理学療法学会inシンガポールに学会発表で参加した際、
Promoting arm recovery in stroke survivors with severe paresis(重度麻痺側上肢麻痺の回復促進)というPostコースを受講しました。
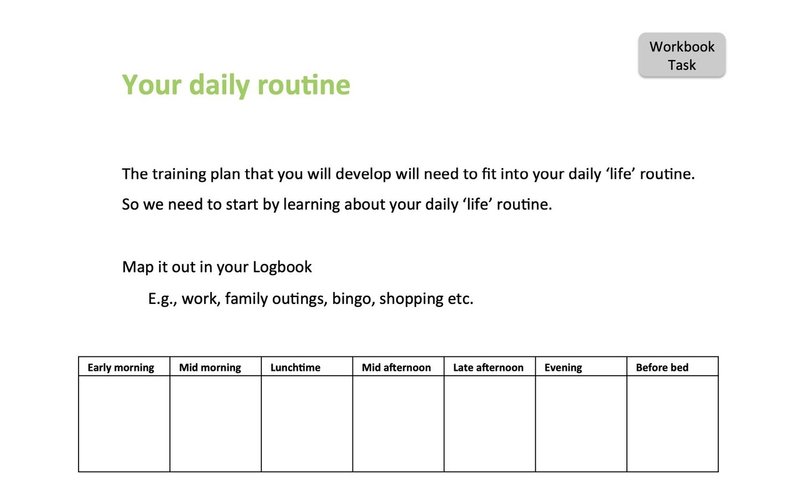
その際、最初に提示された内容としては下図になります。
自分の生活時間における上肢の参加内容を生活時間に応じて知りましょう。
知らなければ、上肢に対する介入=機能障害のみとなり、参加の促し=行動変容に結びつけることは難しいという内容でした。
つまり、マネージメントを促す際に、療法士自身が目的とする活動と参加のバリエーションを知る必要があり、それはどの生活時間に活用されるのかを明確化する必要があると思います。
そのため対象者「と」マネージメントを行い、療法士の成長も求められると考えています。
終わりに
運動学習について、経験も踏まえながら、例え話の中で紹介させて頂きました。
学問としての運動学習を実際の臨床の中で、どのように工夫するのか?という臨床と知識の架け橋はとても重要な視点だと考えています。
少しでも悩んでいる方々の視点が広がるきっかけに繋がれば嬉しく思います。
最後に、姿勢制御・感覚入力の項でお伝えした臨床過程をストーリーの中で述べさせて頂きたいと思います。
・対象者とのコミュニケーションの中で目標設定を行い
(SDM:Shared Decision Making)
・目標の構成要素を明確化し(全体課題)、構成要素(部分課題)を抽出
・動作分析=療法士の強み
・目標設定に基づいた課題の段階付けを行い、治療プランを対象者と共有する
・介入時に姿勢制御を背景とした感覚入力(ハンドリング)を行い、感覚システムの準備及び目的とする筋活動(時にシナジーも含む)を活性化する
・筋活動の活性化によるKinetic Chain(力学的連鎖)を求め、筋活動と筋活動の繋がりを深める
・1回の治療前後で設定した部分課題の達成を評価し、強化学習による学習の定着やセルフトレーニングによるマネージメントを促進する
参考文献
・Dobkin, B. H et al, Neurorehabilitation and Neural Repair, 24(3), 235–242.2010.
・Schultz W et al. A neural substrate of prediction and reward.Science. 1997 Mar 14;275(5306):1593-9.
・久保田競、虫明元、宮井一郎(2007). 学習と脳―器用さを獲得する脳.
サイエンス社
・Carey LM. et al. Sensory loss in stroke patients: effective training of tactile and proprioceptive discrimination. Arch Phys Med Rehabil. 1993 Jun;74(6):602-11.
・WCPT2015(世界理学療法学会)Postコース資料. Promoting arm recovery in stroke survivors with severe paresis
・Fontana FE et al. Whole and part practice: a meta-analysis. Percept Mot Skills. 2009 Oct;109(2):517-30.
・Schmidt, R. A., & Wrisberg, C. A. (2008) Motor learning and performance: a problem- based learning approach. (4th ed.) Champaign, IL: Human Kinetics.
この記事が気に入ったらサポートをしてみませんか?