千葉ノード反省会

どうもfTomoです。
今回は千葉ノードが無事に終了したので、その反省をしてみたいと思います。
結果発表
なんと、
レスキューメイズエントリで「優勝」
日本リーグ全体の「プレゼンテーション賞」
そしてノード全体の「フロンティア賞」
を獲得することが出来ました。
嬉しいね
ポスター
次に今回プレゼンテーション賞を取ったポスターを紹介します。

まぁ必要最低限の内容ではあるので関東ではもう少し情報量を増やしてプレゼンテーション賞取れるように頑張りたいと思います。
今大会でのハードウェアの反省
・回路
大会中にハンダゴテを出しませんでした!えらい!
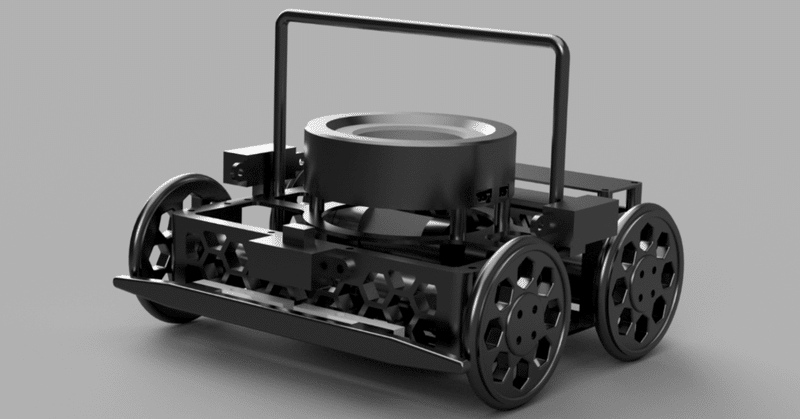
・機体のパーツ
あれれれー? pic.twitter.com/23tgsrlYdm
— fTomo (@Ftomo_robot) November 26, 2023
代わりに予備部品のないバンパーが破損しました。普通に手で触ってたらポキッって感じですね。ミスりました。
その後予備のネジとかワッシャーとかで修復しました。耐え
予備部品はちゃんと印刷しておこう!
・走行性能
走りに関しては、まぁギリ走ったなというレベルで、探索しました!なんて言えるレベルじゃなかったのは反省点ですね。
走破性に関しても問題があって1cmのバンプを登れませんでした。完全にトルク不足でしたね。
・センサ系
今回カラーセンサ1個とPSD(距離)センサ1個しか動かせませんでした。他にジャイロとか載せてたんですけどね。
OBからPSDは電圧の変動や、距離が近すぎると値が逆に上がっていくなどの欠点が多くあっておすすめしないと教えてもらったのでToFにチャレンジしてみようかなーっていうお気持ちです。
カラーセンサはめちゃくちゃ精度よかったです。ただRGBの値を比較してるだけなのですがいい感じに外からの光を基板が防いでくれていて安定してました。次回は2つのセンサを有効化して、さらに精度あげれるようにしていきたいです。
今大会でのソフトウェアの反省
Arduino日本語リファレンスとしろくまを駆使して一晩でプログラムを書きました。LEDの点滅とかは会場で書きました。間に合ってよかったです。
会場で書いたやつなのに周りの反応めちゃ良かったLEDのモーション pic.twitter.com/TlDFITP4Ms
— fTomo (@Ftomo_robot) November 27, 2023
プログラムは前面の距離センサが反応したら左に曲がる それ以外は進むってだけなので探索ではないですね。
次回は左右の距離センサを生かしてしっかり探索できるようにしたいと思ってます。
最後に
ここまで読んだ物好きは少ないと思いますが、最後まで読んでいただきありがとうございます。
あまり参考になる部分はなかったとは思いますが、今度書こうと思っている機体紹介では参考になれるように頑張りますのでお楽しみに
この記事が気に入ったらサポートをしてみませんか?