【ブレイクダンス】世界レベルのネックムーバーとネックムーブを物理的に考察してみた

はじめまして,どらびと申します.
タイトルの通り,ネックムーブというブレイクダンスの技について,世界トップクラスの
bboy hiros1様
(Twitter:https://twitter.com/247danceworld)
(Instagram:https://www.instagram.com/bboyhiros1/?hl=ja)
と,お話(インスタ内で)させて頂いた内容を,まとめようというプロジェクトです.
一応,ネックムーブを良く知らないという方のために,hiros1様のムーブを載せておきます.かっこいい…(溜め息)
私は練習中の身ですので,ネックムーブはまだまだ全くできません.ただ,できる人とちゃんと感覚を共有できた(はず)ですので,その部分をまとめていくという形になります.
ブレイクダンスといえばユース五輪の競技にも選ばれ,最近注目を集めているスポーツ?だと思います.昔はあまり良いイメージがなかったかもしれませんが,今ではAPOPなどの賑わいで,民放とかにも露出し始めてますし.
私がブレイクダンス始めたころからずっと憧れていたパワームーバーの方が,無料WSとか,インスタで技の講座動画を挙げてくれているんですね.
動画内でも,例を挙げつつとても理論的に技の考察を行っていて,私はそういうの大好きなのですっごく話が白熱しました(したと思ってるの自分だけかもですが)
その後,そこでの議論内容についてnoteに挙げることを快諾頂いたのでこうしてつらつらと書き始めた.というわけです.
というわけで本編
ネックムーブを物理的に考察する
1.グランド系パワームーブは基本的に本質が同じ
これ,初手から大事な話であると同時に頭では理解できても体で理解するのがすごく難しいと思います.特にウィンドを先に習得した人.
基本的に,グランド系のムーブであるところの
・ヘッドスピン
・Aトラ
・ウィンドミル
の理想的なゴールはコマの運動です.
ヘッドスピンは分かりやすくて,そのままコマがきれいに回っているのが理想です.いうまでもなく想像できますね.
Aトラ,ウィンド(バネらないもの)に関しては,傾いて回っているコマの動きが理想の形になります.どちらかというとAトラの方が理想形に近い形をしていて,瞬間的に手をついて支えるものの,体の芯が足先まできっちり作れていればほとんど理想的なコマと変わりません.
ネックムーブに関しては,コマでいう軸の部分が仰向けの時に必ず曲がってしまいますので,理想的なコマの動きはしません.ただ,かなり類似した動きであることをイメージできるだけで恐らくですが意識が変わってくるのかなあと思います.
さて,3つのパワームーブがいずれも"コマ"の運動が理想であるということがご理解頂けたでしょうか.ここからようやく物理の話に入ります.
2.コマの物理
3つのムーブの理想がコマの動き
までを良しとした時,じゃあコマの動きとは?という所を物理的に考えます.素朴な疑問として
・一点倒立は安定しないのにヘッドスピンは安定する
・ネックムーブでは何故腰が落ちないのか
という疑問は(ある程度は)コマの物理によって説明がつきます.
これが理解できると,綺麗なネックムーブをするために,自分の体はどう動くべきなのかが理解できるでしょう(できるとは言ってない.)
それでは本題.以下,コマの物理に関して説明をするのに下記の文献を使います.但しそれらがあっている保証はしませんので悪しからず.また以降hiros1様のインスタ動画以外の画像はこちらの文献からの引用になりますので,画像ごとに出展を表記するのは省略します.読みたい人は以下のリンクからお願いします.
また,以下のリンクは引用はしてないものの参考になるかと思いますのでリンクを貼っておきます.興味があれば見てください.
2-0.コマの前提とネックムーブで重要な体の使い方
まず一般的なコマを見てもらえばわかるように,回転軸を中心として左右対称な形をしています.ネックムーブも理想的にはその方が良いのですが,ブーメランと呼ばれるように先行足を曲げるパターンもあります.これについては人間の骨格の話が含まれているので一旦置いときましょう.
次に,コマの軸は剛体,要するにカッチカチです.回転してる途中でしなったりしません.ネックムーブの場合,この原則からは外れてしまいますが,この部分に関しても一旦は忘れましょう.
ただ,重要なのは
・軸に対して対称な形
・軸は曲げない(固める)
というのは原則です.バネウィンドしちゃう方はまずここを意識すべきです.
2-1.なぜ回転しているコマは倒れないのか.
コマの動きをよーく観察してみると,最初は安定して軸を中心として回転しますが,徐々に回転が落ちるにつれて,斜めにずれながら回ります.下の図のように.
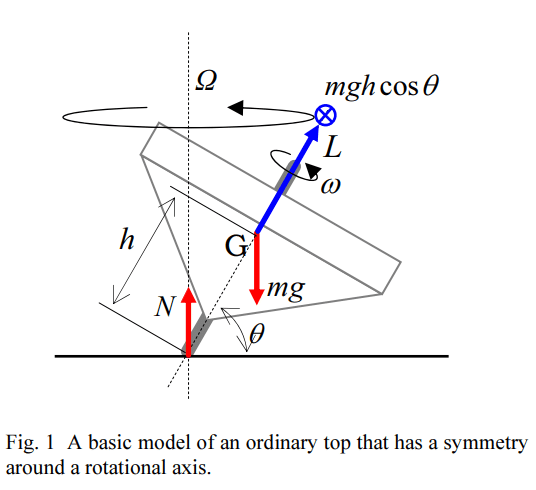
普通であれば重力によって倒れてしまうはずですが,実際にはそうはなりません.つまりは重力に釣り合うだけの上方向の力がどこかから生じているわけです.この力というのが,回転することによって生じる力になります.だから回っているコマは倒れないんです.
この,"回っていることによって生じる力"というのは,回転しているものの回転半径とそのスピードによって,その大きさが変わります.つまり理想的なネックムーブを回るには
・自分の重心位置
・回転するときにどれだけ傾いているか
・足をどれくらい開くか
・どれくらいのスピードで回転するか
の4つがきれいに噛み合わさっていないとうまく回れません.難しい…
2-2.ネックムーブの回転軸はコマと違って太い
ネックムーブをコマに例えて話をしていますが,どうしてもそれだけでは説明できなくなります.ということで,コマよりもう少しだけ現実に近いものに置き換えます.
hiros1様がinstagramの動画で例に挙げていたのが乾電池です.
コマと圧倒的に違う点は,"回転軸がとても太い"点にあります.
図にするとこんな感じ.(引用)
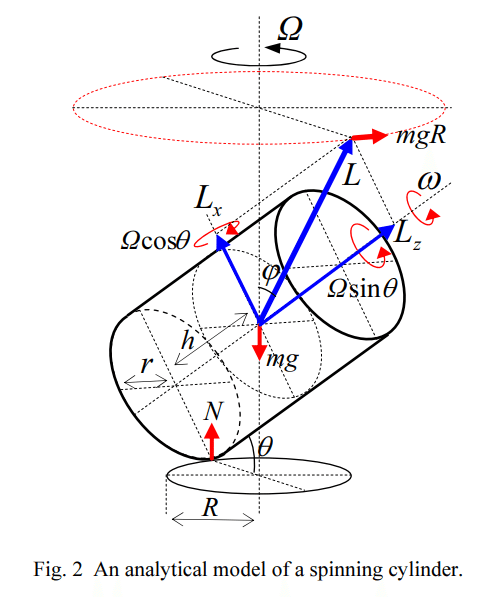
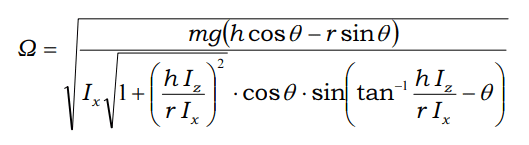
こうなると少し話が変わってくるのです.ほんの少しの差のようですが,数学的には難易度がだいぶ上がります.大学レベルじゃないとほぼ聞かないであろう"テンソル"という概念がないと話ができなくなるので,具体的な解法は放置することにして,答えの式だけ載せます.

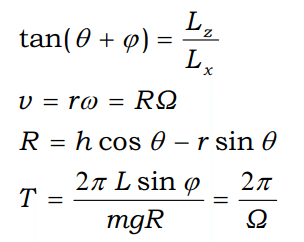
これは,この円筒が"滑ることなく回転する"ことを前提にしています.hiros1様の動画を見て頂くとわかるように実際には滑りながら運動する部分があります.これが恐らく回転軸のズレだったり,理想から外れている部分を補っているのでは?という話をしました.そんな気はしますがそれを数学的に書くのは厳しいように思います.が,重要な点だと思うので後程ちらっと触れてみます.
さて,若干話が逸れたので戻しますと,この式からも結局基本的に重視すべき点は変わらず
・自分の重心位置
・回転するときにどれだけ傾いているか
・足をどれくらい開くか
・どれくらいのスピードで回転するか
の4つが重要になります.これに加えて,
・円柱の半径
がプラスされてきます.ただ,この"円柱の半径"って何だろう,というのを考えると,結構複雑になってしまいます.厳密には計算不可だと思います.
が,ちょっと工夫して考えてみましょう.
ネックムーブ(にできるだけ近い動き)をした時の自分の体の傾きをθ
(但し前提として,うつ伏せ時と仰向け時で同じ角度とします.簡略化のため.横向いてるとき?!全部同じってことにしてください!!)
首根っこ(ネックムーブで仰向けになった時に地面と触れているところの中で一番背中側)から頭頂部までの長さをlとすると
近似的には円柱の直径をlcosθと計算できます.
軸の中心は実は円柱からズレますけど,誤差ということで.
この近似をしている時に,理想論と違っている部分っていうのが,
うつ伏せ時に,理想論では滑らずに転がるはずなのに,現実では滑って運動していることになる,という点です.どういうことかというと,
うつ伏せ時は頭が中心に回転している→公転方向にはほとんど移動しない(下図参照)

(以下2枚はhiros1様のネックムーブの仰向け、うつ伏せ時のスクショ。許可は得てます。)
(図の棒人間と殆ど同じ形。まさしく理想型に限りなく近いと思っています)


円柱の周りを滑らずに転がる場合,軸の中心は公転して,移動し続けるんですけど,ネックムーブの場合それができなくなってしまうのです.
で,それを補うように,仰向け時には公転方向に大きく滑る(hiros1様の動画でいうとネックスピンしてる部分です.おそらくhiros1様がネックスピンを練習メニューに据えているのは,軸を伸ばしたままバックスピン=公転することがネックムーブの中で特殊かつ大事な動きだと直感的に知っているからなんじゃないかと最近は推測してたりします.)←本人のお墨付き頂いたのでたぶん正しいです.
というような動きになります.
結論,数学,物理的には,自分の体の特徴がわかれば,理想的なネックムーブをするのに
・どれくらい足を開くべきなのか
・どれくらいのスピードで自転,公転すべきなのか
・一回の公転中に何回自転するのか
・体の角度はどれくらい起こすべきなのか
あたりは検討がつけられます.まあ計算してもうまくなるわけではないのですが.
ただ,自分の動きを動画で見た時に"どこが物理的におかしくてネックムーブになり得ないのか"がわかれば,どこを改善すべきなのかは自ずと見えてくるのではないかと思っています.
終わりに
コマの物理から見たネックムーブについてはこの辺で区切りたいと思います.
ちょっと余談になりますが,Aトラもこの観点から話を考えると,円柱の回転+時々軸が止まるという現象から説明ができます.軸がぶれない分,こちらの方が物理的には考察しやすいでしょうが,ここでは議論しません.
文字数も4000近いので,この辺で終わりにしたいと思います.
今回は"物理"という観点からネックムーブを考察してみましたが,まだブーメランの話とかができていませんので,次は骨格の観点からネックムーブの考察ができればと考えています.
それではまたいつか.
この記事が気に入ったらサポートをしてみませんか?