
テオヤンセンのやつ

いつか四足歩行ロボを作りたい
ということで勉強からの逃避に試作したテオヤンセンのやつ
強度と自重と馬力の兼ね合いがむずい
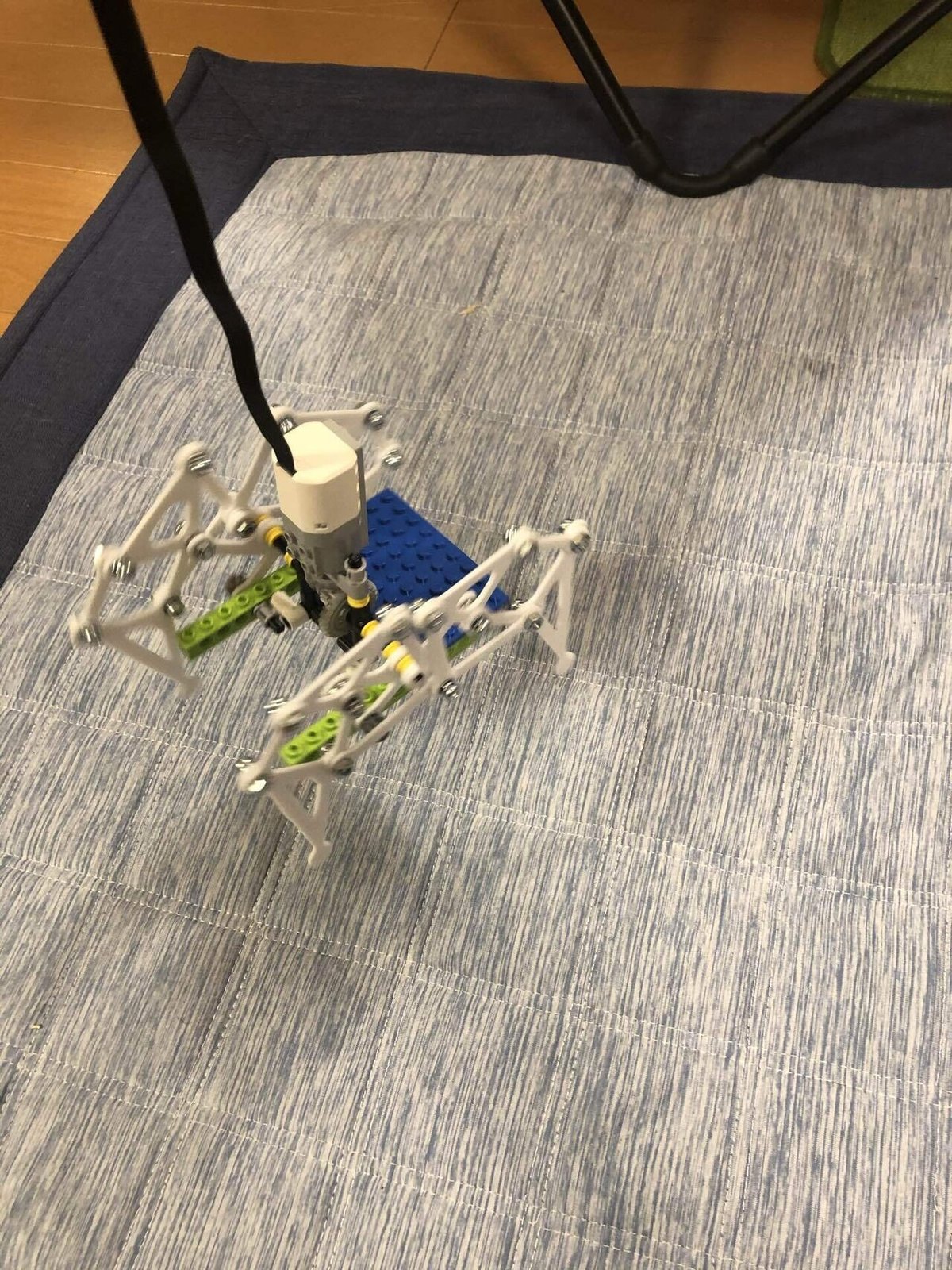
①レゴのモーターを動力にしたやつ
pla, 全体で200gくらい+バッテリー
関節はネジとナット
→重過ぎて動かない、モーターのトルクが足りない感じ。もっと歩幅を小さい感じにするべきだったか。
関節部もプラスチックで作れば動いたかも?
サーボと乾電池とかで再チャレンジしたい

②チョロQのゼンマイを動力にしたやつ
PLA、全体で30gくらい
関節は針金
関節部止める作業がめちゃ細かくて作るのに2時間くらいかかった
→動いたけど強度が足りないのと自重とゼンマイの力がどっかで釣り合ってすぐ動けなくなる
やっぱり4本足を一個のモーターじゃなくて少なくとも2個、できたら4個で動かしたいなー
その後は関節ごとに動かせるのとか多関節型のにしたい
練習用にロボットアームとかヘビ型のを設計しようかな